一种目标识别用大光圈高清车载镜头的制作方法
1.本实用新型涉及光学镜头技术领域,具体涉及一种目标识别用大光圈高清车载镜头。
背景技术:
2.近年来,汽车智能化、自动化也成为汽车行业发展的一个研究热点,辅助驾驶、自动驾驶作成为众多车企的未来研究方向。而智能汽车要实现辅助驾驶、自动驾驶,基于大光圈、高清晰度车载镜头目标识别系统必不可少。
3.目前,市场上常见的车载镜头像素分辨率比较低,光圈比较小,这类镜头对低照度的目标识别能力较差,无法满足识别目标要求。
技术实现要素:
4.为解决上述技术缺陷,本实用新型的目的是提供一种目标识别用大光圈高清车载镜头,对低照度的目标识别能力较强,能够满足识别目标的要求。
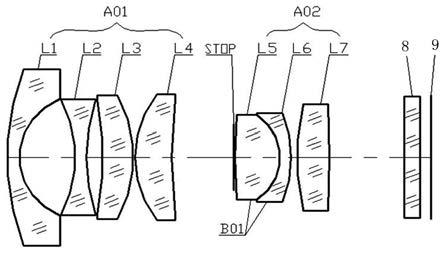
5.为达到上述目的,本实用新型采取的技术方案是:一种目标识别用大光圈高清车载镜头,从物方到像方,依次包括正光焦度前透镜组a01、孔径光阑stop、正光焦度后透镜组a02、滤光片及像面;
6.所述正光焦度前透镜组a01由负光焦度第一透镜l1、负光焦度第二透镜l2、正光焦度第三透镜l3及正光焦度第四透镜l4组成,所述负光焦度第一透镜l1为弯月透镜,负光焦度第二透镜l2为双凹透镜,正光焦度第三透镜l3为弯月透镜,正光焦度第四透镜l4为弯月透镜;
7.所述正光焦度后透镜组a02由正光焦度第五透镜l5、负光焦度第六透镜l6及正光焦度第七透镜l7组成,所述正光焦度第五透镜l5为双凸透镜,负光焦度第六透镜l6为弯月透镜,正光焦度第七透镜l7为双凸透镜,正光焦度第五透镜l5与负光焦度第六透镜l6组成正光焦度胶合透镜组b01;
8.所述孔径光阑stop位于正光焦度前透镜组a01与正光焦度后透镜组a02之间,所述滤光片位于正光焦度后透镜组a02与像面之间;
9.所述负光焦度第一透镜l1后表面顶点至负光焦度第二透镜l2前表面顶点距离为2.73~2.83mm;
10.所述负光焦度第二透镜l2后表面顶点至正光焦度第三透镜l3前表面顶点距离为0.77~0.87mm;
11.所述正光焦度第三透镜l3后表面顶点至正光焦度第四透镜l4前表面顶点距离为0.04~0.14mm;
12.所述正光焦度第四透镜l4后表面顶点至正光焦度胶合透镜组b01表面顶点距离为3.1~3.2mm;
13.所述正光焦度胶合透镜组b01后表面顶点至正光焦度第七透镜l7前表面顶点距离
为0.24~0.34mm。
14.进一步地,所述负光焦度第一透镜l1后表面顶点至负光焦度第二透镜l2前表面顶点距离为2.78mm。
15.所述负光焦度第二透镜l2后表面顶点至正光焦度第三透镜l3前表面顶点距离为0.82 mm。
16.所述正光焦度第三透镜l3后表面顶点至正光焦度第四透镜l4前表面顶点距离为0.09mm。
17.所述正光焦度第四透镜l4后表面顶点至正光焦度胶合透镜组b01表面顶点距离为3.13mm。
18.所述正光焦度胶合透镜组b01后表面顶点至正光焦度第七透镜l7前表面顶点距离为0.29mm。
19.本实用新型的有益效果:按照上述方案设计的一种目标识别用大光圈高清车载镜头,可对近距离目标识别,配合其他车载雷达使用,提高自动驾驶汽车对近距离目标的识别能力。本实用新型的镜头角度大、光圈大、分辨率较高,能更清晰的识别大范围、低照度环境的目标,提前对汽车前方目标进行预警,同时光学系统总长较短,特别适用于目标识别车载摄像头系统中。
附图说明
20.下面结合附图及实施例,对实用新型的结构和特征作进一步描述。
21.图1为本实用新型的结构示意图。
22.图2为本实用新型实施例的光线传导示意图。
23.图3为本实用新型实施例的mtf(调制传递函数)示意图。
24.图4为本实用新型实施例的场曲示意图。
25.图5为本实用新型实施例的畸变示意图。
26.图6为本实用新型实施例的点列图示意图。
27.附图1中,8.滤光片,9.像面。
具体实施方式
28.参看图1
‑
6是本实用新型的一种实施例,公开了一种目标识别用大光圈高清车载镜头,从物方到像方,依次包括正光焦度前透镜组a01、孔径光阑stop、正光焦度后透镜组a02、滤光片8及像面9;
29.所述正光焦度前透镜组a01由负光焦度第一透镜l1、负光焦度第二透镜l2、正光焦度第三透镜l3及正光焦度第四透镜l4组成,所述负光焦度第一透镜l1为弯月透镜,负光焦度第二透镜l2为双凹透镜,正光焦度第三透镜l3为弯月透镜,正光焦度第四透镜l4为弯月透镜;
30.所述正光焦度后透镜组a02由正光焦度第五透镜l5、负光焦度第六透镜l6及正光焦度第七透镜l7组成,所述正光焦度第五透镜l5为双凸透镜,负光焦度第六透镜l6为弯月透镜,正光焦度第七透镜l7为双凸透镜,正光焦度第五透镜l5与负光焦度第六透镜l6组成正光焦度胶合透镜组b01;
31.所述孔径光阑stop位于正光焦度前透镜组a01与正光焦度后透镜组a02之间,所述滤光片位于正光焦度后透镜组a02与像面之间;
32.所述负光焦度第一透镜l1后表面顶点至负光焦度第二透镜l2前表面顶点距离为2.78mm;
33.所述负光焦度第二透镜l2后表面顶点至正光焦度第三透镜l3前表面顶点距离为0.82 mm;
34.所述正光焦度第三透镜l3后表面顶点至正光焦度第四透镜l4前表面顶点距离为0.09mm;
35.所述正光焦度第四透镜l4后表面顶点至正光焦度胶合透镜组b01表面顶点距离为3.13mm;
36.所述正光焦度胶合透镜组b01后表面顶点至正光焦度第七透镜l7前表面顶点距离为0.29mm。
37.上述各透镜相关参数如下表:
[0038][0039]
上述各透镜相关参数优选值如下表:
[0040]
[0041]
参看图2为本实用新型实施例的光线传导示意图,系统总长短,小于21.1mm,非常适合用于车载摄像头系统。
[0042]
参看图3为本实用新型实施例的mtf(调制传递函数)曲线示意图,图中横坐标表示空间频率,单位:线对/毫米(lp/mm),纵坐标表示mtf值。从图中可以看出,该实施例mtf曲线集中度比较高,说明该实施例技术方案整个像面的成像一致性优良,在整个像面上都能得到高清晰度的图像,在167lp/mm处,所有视场mtf值都大于36%。
[0043]
图4为本实用新型实施例的场曲示意图,图中横坐标表示同色的t和s间的距离及像散的大小,纵坐标表示视场。从图4中可以看出,本实施例中场曲得到了有效控制。
[0044]
参看图5为本实用新型的畸变示意图,图中横坐标表示畸变百分比,纵坐标表示视场范围。从图5可以可出,整个像面中的畸变最大为
‑
43%。
[0045]
图6为本实用新型实施例的点列图示意图。从图6可以看出,各视场下成像点几乎都汇聚成一个理想的点,表明本实施例具有良好的成像性能。
[0046]
以上所述实施例,仅为本实用新型的一部分实施例,本实用新型的构思和范围不限于上述示范性实施例的细节。因此,在不脱离本实用新型设计构思的前提下,本领域其他技术人员根据本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型的保护范围,本实用新型请求保护的内容全部记载在权利要求书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1