一种胶合透镜结构及智能车载广角镜头的制作方法
1.本实用新型涉及一种胶合透镜结构及智能车载广角镜头。
背景技术:
2.自动驾驶技术依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让车载系统可以在没有任何人类主动的操作下,自动安全地操作机动车辆,自动驾驶引入汽车后将有助于提高出行的安全性、舒适性、便利性,构造安全舒适的出行条件。
3.车载自动驾驶系统涉及光电转换、图像音频转换设备、各种传感器等诸多信息采集传输设备,高清镜头作为图样采集的重要电子元件在信息采集光电转换中发挥着不可替代的作用。现有的镜头中常常使用胶合透镜结构,即,将两件透镜粘接在一起,胶合精度低,影响产品质量。
4.同时,市面上现有的光学镜头普遍存在视场角偏小、分辨率过低、尺寸亦不够小、拍摄时存在诸多死角等问题,从而导致影像在拍摄时暗淡无光、模糊不清,难以达到较为理想的使用效果。
技术实现要素:
5.本实用新型的目的是针对以上问题提供一种胶合透镜结构及智能车载广角镜头
6.为达到上述目的,本实用新型公开了一种胶合透镜结构,该胶合透镜结构包括直径较小的前筒及直径较大的后筒,所述前筒与后筒之间连接有台阶面,所述前筒内安装有三号透镜,所述后筒内安装有四号透镜,所述三号透镜与四号透镜胶合在一起,所述台阶面上开设有与三号透镜、四号透镜之间的胶合面相对应的排气槽,所述台阶面上还开设有用于连通排气槽与外界的排气孔。使用时,安装四号透镜时,首先,将四号透镜装入后筒内,直到四号透镜的前端边缘与台阶面相贴合,然后,固定四号透镜,完成安装;安装三号透镜时,首先,在四号透镜前端面涂抹上粘胶,然后,将三号透镜装入前筒内,直到三号透镜与四号透镜胶合,最后固定三号透镜,完成安装。在此过程中,三号透镜与四号透镜之间的空气被挤入排气槽,并通过排气孔排出,减少三号透镜与四号透镜之间的气泡,装配精度高,增加透光效果。
7.优选的,所述前筒内侧开设有前胶槽,所述前筒上还开设有用于连通前胶槽与外界的前注胶孔。当需要固定三号透镜时,向前注胶孔中注入粘胶,粘胶流入前胶槽,用于连接三号透镜与前筒,安装方便、牢固。
8.优选的,所述后筒内侧开设有后胶槽,所述后筒上还开设有用于连通后胶槽与外界的后注胶孔。需要固定四号透镜时,向后注胶孔中注入粘胶,粘胶流入后胶槽,用于连接四号透镜与后筒,安装方便、牢固。
9.优选的,所述三号透镜为具有正光焦度的双凸透镜,所述四号透镜为具有负光焦度且凹面朝向前方的弯月透镜。使用时,三号透镜与四号透镜构成的透镜结构具有正光焦度,用于接收前方的光线、矫正色差,并将光线汇聚到后方。
10.一种智能车载广角镜头,该智能车载广角镜头包括从前向后依次设置的一号透镜、光阑、二号透镜及如上所述的胶合透镜结构。使用时,物面的光线透过一号透镜、光阑及二号透镜,三号透镜与四号透镜构成的透镜结构具有正光焦度,用于接收二号透镜的光线、矫正色差,并将光线汇聚到后方的像面上。
11.优选的,所述一号透镜为具有负光焦度且凹面朝向光阑的弯月透镜,所述二号透镜为具有正光焦度的双凸透镜;
12.镜头的整个光学系统的焦距为f,所述一号透镜的焦距f1的范围为0.4<|f1|/f<2.6 ;二号透镜的焦距f2的范围为0.6<|f2|/f<3.1;三号透镜和四号透镜粘合成的胶合透镜组的焦距f3
‑
4的范围为4.5<|f3
‑
4|/f<6.3。
13.优选的,镜头的长度ttl与整个光学系统焦距值f之间的关系为ttl/f≤5.4。有利于产品小型化。
14.优选的,镜头的长度ttl≤15.5mm。有利于产品小型化。
15.优选的,所述一号透镜的折射率nd为1.5<nd<1.7,色散率vd为47<vd<57;所述二号透镜的折射率nd为1.6<nd<1.8,色散率vd为42<vd<55;所述三号透镜的折射率nd为1.5<nd<1.8,色散率vd为50<vd<62;所述四号透镜的折射率nd为1.8<nd<2.0,色散率vd为18<vd<23。
16.优选的,所述一号透镜、二号透镜、三号透镜、四号透镜均为玻璃球面镜片。玻璃材质光学性能优异,同时造价低廉,方便使用。
17.综上所述,本实用新型的有益效果在于:减少三号透镜与四号透镜之间的气泡,装配精度高,增加透光效果。镜头在使用时,物面的光线透过一号透镜、光阑及二号透镜,三号透镜与四号透镜构成的透镜结构具有正光焦度,用于接收二号透镜的光线、矫正色差,并将光线汇聚到后方的像面上。
附图说明
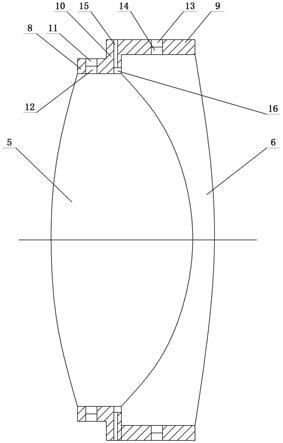
18.图1是本实用新型的一种胶合透镜结构的结构示意图;
19.图2是本实用新型的一种胶合透镜结构中前筒及后筒的结构示意图;
20.图3是本实用新型的一种智能车载广角镜头的结构示意图;
21.图4是本实用新型的一种智能车载广角镜头的光线路径示意图;
22.图5是本实用新型的一种智能车载广角镜头的mtf解像曲线图;
23.图6是本实用新型的一种智能车载广角镜头的离焦曲线图;
24.图7是本实用新型的一种智能车载广角镜头的像散曲线图;
25.图8是本实用新型的一种智能车载广角镜头的光学畸变图;
26.图9是本实用新型的一种智能车载广角镜头的点列图。
27.图中:1、物面;2、一号透镜;3、光阑;4、二号透镜;5、三号透镜;6、四号透镜;7、像面;8、前筒;9、后筒;10、台阶面;11、前注胶孔;12、前胶槽;13、后注胶孔;14、后胶槽;15、排气孔;16、排气槽。
具体实施方式
28.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
29.在本技术的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
30.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
31.下面结合附图和具体实施方式对本实用新型作进一步说明:
32.实施例1:如图1到2所示,一种胶合透镜结构,包括直径较小的前筒8及直径较大的后筒9,前筒8与后筒9之间连接有台阶面10,前筒8内安装有三号透镜5,后筒9内安装有四号透镜6,三号透镜5的直径小于四号透镜6的直径,四号透镜6的前端边缘能够与台阶面10相贴合。三号透镜5与四号透镜6胶合在一起,台阶面10上开设有与三号透镜5、四号透镜6之间的胶合面相对应的排气槽16,台阶面10上还开设有用于连通排气槽16与外界的排气孔15。
33.使用时,安装四号透镜6时,首先,将四号透镜6装入后筒9内,直到四号透镜6的前端边缘与台阶面10相贴合,然后,固定四号透镜6,完成安装;安装三号透镜5时,首先,在四号透镜6前端面涂抹上粘胶,然后,将三号透镜5装入前筒8内,直到三号透镜5与四号透镜6胶合,最后固定三号透镜5,完成安装。在此过程中,三号透镜5与四号透镜6之间的空气被挤入排气槽16,并通过排气孔15排出,减少三号透镜5与四号透镜6之间的气泡,装配精度高,增加透光效果。
34.前筒8内侧开设有绕前筒8一周的前胶槽12,前筒8上还开设有若干用于连通前胶槽12与外界的前注胶孔11,若干前注胶孔11沿前筒8周向均匀设置。当需要固定三号透镜5时,向前注胶孔11中注入粘胶,粘胶流入前胶槽12,用于连接三号透镜5与前筒8,安装方便、牢固。后筒9内侧开设有绕后筒9一周的后胶槽14,后筒9上还开设有若干用于连通后胶槽14与外界的后注胶孔13,若干前后注胶孔13沿后筒9周向均匀设置。当需要固定四号透镜6时,向后注胶孔13中注入粘胶,粘胶流入后胶槽14,用于连接四号透镜6与后筒9,安装方便、牢固。
35.三号透镜5为具有正光焦度的双凸透镜,四号透镜6为具有负光焦度且凹面朝向前方的弯月透镜。使用时,三号透镜5与四号透镜6构成的透镜结构具有正光焦度,用于接收前方的光线、矫正色差,并将光线汇聚到后方。
36.实施例2:如图1到9所示,一种智能车载广角镜头,其特征在于,包括从前向后依次设置的一号透镜2、光阑3、二号透镜4及如实施例1所述的胶合透镜结构。使用时,物面1的光线透过一号透镜2、光阑3及二号透镜4,三号透镜5与四号透镜6构成的透镜结构具有正光焦度,用于接收二号透镜4的光线、矫正色差,并将光线汇聚到后方的像面7上。
37.具体的,一号透镜2、二号透镜4、三号透镜5、四号透镜6均为玻璃球面镜片。玻璃材质光学性能优异,同时造价低廉,方便使用。
38.具体的,一号透镜2为具有负光焦度且凹面朝向光阑3的弯月透镜,二号透镜4为具有正光焦度的双凸透镜,镜头的整个光学系统的焦距为f。
39.其中,一号透镜2的焦距f1的范围为0.4<|f1|/f<2.6 ,一号透镜2对光线起发散作用,主要用于接收较超广角范围的光线。当一号透镜2的焦距f1过小时,一号透镜2需要大幅度的减小其曲率半径,会使镜片表面弯曲程度增加,加大影像畸变,并增加生产成本;当一号透镜2的焦距f1过大时,视场角会降低,必须加大一号透镜2的直径,不利于产品小型化。
40.其中,二号透镜4的焦距f2的范围为0.6<|f2|/f<3.1,二号透镜4用于将一号透镜2的光线汇集到三号透镜5与四号透镜6构成的透镜结构上,并平衡像差。
41.其中,三号透镜5和四号透镜6粘合成的胶合透镜组的焦距f3
‑
4的范围为4.5<|f3
‑
4|/f<6.3。胶合透镜结构用于接收二号透镜4的光线、矫正色差,并将光线汇聚到后方的像面7上。当胶合透镜结构的焦距f3
‑
4过小时,加大影像畸变,优化困难;当胶合透镜结构的焦距f3
‑
4过大时,像差增大,降低像质。
42.光阑3用于限制进入二号透镜4的光线宽度,可以滤掉设计波段外的杂光,实现近轴光线成像。
43.镜头的长度ttl与整个光学系统焦距值f之间的关系为ttl/f≤5.4。镜头的长度ttl≤15.5mm。有利于产品小型化。
44.进一步的:一号透镜2的折射率nd为1.5<nd<1.7,色散率vd为47<vd<57,有利于大视角的光线能够有效入射,并能减小一号透镜2的口径;二号透镜4的折射率nd为1.6<nd<1.8,色散率vd为42<vd<55,能够有效的汇聚经过一号透镜的光线,并补偿色像差;三号透镜5的折射率nd为1.5<nd<1.8,色散率vd为50<vd<62,四号透镜6的折射率nd为1.8<nd<2.0,色散率vd为18<vd<23,减小色差及球差。
45.以下述实施例验证本实用新型的光学性能。
46.表面名称表面类型曲面半径厚度折射率色散系数一号透镜球面26.80.51.6350.8 球面1.952.83
ꢀꢀ
光阑球面无限0.5
ꢀꢀ
二号透镜球面9.543.71.8151.7 球面
‑
4.91.05
ꢀꢀ
三号透镜球面7.42.091.6556.2四号透镜球面
‑
2.90.211.9121.0 球面
‑
11.64.6
ꢀꢀ
47.本实施例的mtf解像曲线如图5所示,其中,横坐标表示线对/每毫米(lp/mm)的空间频率,纵坐标表示mtf值。从图5可以看出,本实施例在160 lp/mm的空间频率内展现了较好的对比度,其综合解像水平较高,也意味着可以拍摄出高清画面;而且整个mtf函数曲线走势平滑下降,高频和低频部分可以相互平衡。
48.本实施例的离焦曲线如图6所示,其中,横坐标表示离焦位置(mm),纵坐标表示在一定空间频率下的mtf值。从图中可以看出,mtf在轴和离轴部分离焦良好且同步,显示本实例具体有较好的离焦性能。
49.本实施例的像散曲线如图7所示,其中图中的函数表示像散曲线,纵轴表示角度,横轴表示调焦(mm)。从图中可以看出,本实施例的像散得到了有效控制,而且在一定程度上可以反应光学畸变程度。
50.本实施例的光学畸变图如图8所示,当全球面设计在全视场时,本实施例的最大f
‑
theta畸变仅为
‑
23%,畸变校正良好,适用于作为智能车载高像素广角镜头使用。
51.本实施例在不同视场(field)的光学系统点列图如图9所示,图9中,各视场下的成像点几乎都汇聚成了一个理想的点,表明本实施例具有良好的成像性能。
52.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1