一种基于STM32的红外镜头无热化控制系统的制作方法
一种基于stm32的红外镜头无热化控制系统
技术领域
1.本实用新型涉及红外成像光学系统,具体涉及一种基于stm32的红外镜头无热化控制系统。
背景技术:
2.红外镜头是红外成像光学系统的重要组成部分,负责接收目标辐射的红外光线并将其汇聚成像到红外探测器上,红外镜头由光学零件及其他支撑光学零件的相关结构件组成。在不同温度条件下,由于光学材料和机械材料的热效应,红外镜头的一些参数会发生变化,导致镜头的相面发生偏移,进而降低成像质量。
3.无热化技术指采用一定的技术消除或减少温度效应引起的成像质量降低,按照其实现方法,大致可以分为机械被动式、光学被动式和电子主动式。现有电子主动式无热化技术是利用传感器探测出温度,再将温度信息传给处理器,处理器利用存储在存储器里的温度-位移对照表查出对应的位移,或利用位移多项式计算出对应的位移,接着驱动电机控制透镜产生位移。
4.中国专利cn210958839u公开了一种基于步进电机和编码器的红外镜头无热化系统,包括温度传感器、主控系统、步进电机和编码器,温度传感器与主控系统的输入端相连,主控系统的输出端通过电机驱动电路连接步进电机,编码器与步进电机相连,用于记录步进电机的步数,并且编码器与主控系统的输入端相连,用于将记录的步进电机步数传递至主控系统。该实用新型中利用编码器来进行位置校准,但编码器反映的只是步进电机的移动量,并不能反映透镜的真实位移,由此产生的调焦误差会影响成像质量。
技术实现要素:
5.本实用新型的目的是解决现有红外镜头无热化系统由于调焦误差而影响成像质量的不足之处,提供一种基于stm32的红外镜头无热化控制系统。
6.为了解决上述现有技术所存在的不足之处,本实用新型提供了如下技术解决方案:
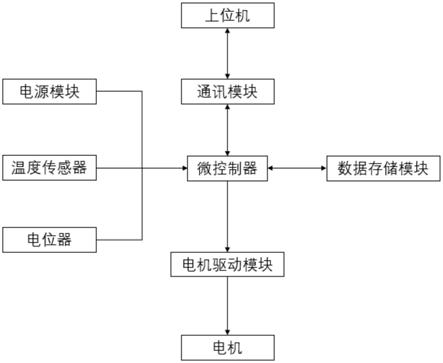
7.一种基于stm32的红外镜头无热化控制系统,其特殊之处在于:包括微控制器、上位机、通讯模块、电源模块、温度传感器、电位器、数据存储模块、电机驱动模块和电机;
8.所述上位机、通讯模块和微控制器依次连接,相邻两者之间相互通讯;所述微控制器包括stm32系列芯片,所述电源模块与微控制器的电源输入口相连,所述温度传感器与微控制器的温度传感器连接口相连,所述电位器输出端与微控制器相连,所述数据存储模块与微控制器之间相互通讯;所述电机驱动模块输入端与微控制器相连,电机驱动模块输出端与电机相连;
9.所述电位器和电机均设置在待移动镜组的镜架上,电位器的输入轴和电机的输出轴上分别设置有与待移动镜组的镜筒主齿圈啮合的第一齿圈和第二齿圈。
10.进一步地,所述微控制器采用stm32f405rgt6微控制器。
11.进一步地,所述电机驱动模块包括drv8872-q1直流电机驱动芯片,该芯片输出最高200khz的pwm波,输出驱动电流可达到3a,并且带故障检测功能。
12.进一步地,所述电源模块中dcdc模块为k7800系列,由dc24v转为dc5v和dc3.3v为后端数字电路供电。
13.进一步地,所述通讯模块为rs232通讯模块或rs485通讯模块或rs422通讯模块。
14.与现有技术相比,本实用新型的有益效果是:
15.(1)本实用新型采用电位器进行位置校准,相较于编码器,电位器可以直接反映移动后待移动镜组的真实位移,并通过比较真实位移与补偿位移值进行位置校准,从而减小调焦误差,进一步改善成像质量。
16.(2)本实用新型基于低功耗、高性能的stm32f4系列微控制器,避免了无热化控制过程的延迟性,具有实用性强、操作简单、低成本等特点。
附图说明
17.图1为本实用新型基于stm32的红外镜头无热化控制系统的结构示意图;
18.图2为本实用新型中电位器、电机与待移动镜组之间的结构示意图。
19.附图标记说明如下:1-镜筒,2-镜架,3-电位器,4-电机。
具体实施方式
20.下面结合附图和具体实施例对本实用新型作进一步地说明。
21.参照图1,一种基于stm32的红外镜头无热化控制系统,包括微控制器、上位机、通讯模块、电源模块、温度传感器、电位器3、数据存储模块、电机驱动模块和电机4。
22.微控制器包括控制芯片、复位电路、晶振时钟电路、旁路电路和程序下载调试jtag接口电路,微控制器型号为stm32f405rgt6,其具有168mhz cpu和1mb闪存,当cpu工作于所有允许的频率时,在闪存中运行的程序,可以达到相当于零等待周期的性能,从而保证无热化控制过程的时效性。
23.上位机、通讯模块和微控制器依次连接,相邻两者之间相互通讯,通讯模块可以选择rs232、rs485或rs422通讯模块,上位机可以通过通讯模块替换、增补和更新微控制器下数据存储模块中的温度和补偿位移值数据,也可以手动移动电机4。
24.电源模块中,dcdc模块为k7800系列,由dc24v转为dc5v和dc3.3v与微控制器的电源输入口相连为后端数字电路供电;温度传感器与微控制器的温度传感器连接口相连,用于向微控制器反馈当前工作温度;待移动镜组的镜筒1上设置有主齿圈,电位器3设置在待移动镜组的镜架2上,电位器3上设置有与主齿圈啮合的第一齿圈,并且电位器3输出端与微控制器相连,由于在无热化控制过程中待移动镜组的镜筒1调整量最大也少于一周,因此电位器3已经足够,而且相比较编码器,电位器3可以向微控制器反馈待移动镜组的真实位移;数据存储模块与微控制器之间相互通讯,用于存储温度和补偿位移值数据;
25.电机驱动模块包括drv8872-q1直流电机驱动芯片,该芯片输出最高200khz的pwm波,输出驱动电流可达到3a,并且带故障检测功能,电机驱动模块输入端与微控制器相连,电机驱动模块输出端与电机4相连,电机4设置在待移动镜组的镜架2上,电机4上设置有与主齿圈啮合的第二齿圈,电机驱动模块输出的pwm波驱动电机4带动待移动镜组的镜筒1移
动。
26.本实用新型的具体工作流程如下:
27.步骤(1):采集数据
28.记录当前的温度t0,通过上位机手动移动电机4到使成像清晰的位置,移动过程中可以选择每次移动的速度百分比,如1/10,1/100,1/1000等,先快速移动再微调,移动完成,记录当前的位置l0;在-40℃~+70℃温度范围内每次改变温度δt,测试并记录使成像清晰的电机4移动的补偿位移值l
x
,以及其所对应的温度t
x
(t
x
=t0+δt),δt可以根据实际使用需求调整;
29.步骤(2):拟合温度和补偿位移值曲线
30.采用matlab数学软件将温度t
x
和补偿位移值l
x
生成温度和补偿位移值数学关系函数曲线,并存储进数据存储模块内;
31.步骤(3):无热化控制
32.当温度传感器接收温度变化大于等于δt,温度传感器采集当前工作温度ti,微控制器从数据存储模块获取ti对应的补偿位移值li,微控制器通过电机驱动模块的驱动芯片输出pwm波驱动电机4移动li;微控制器从电位器3获取待移动镜组的镜筒1的真实位移l,并对位置偏差|l
i-l|进行判断,当|l
i-l|大于预设的误差范围时,微控制器将l
i-l作为补偿位移值驱动电机4再次移动,直至位置偏差在预设的误差范围内。
33.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制,对于本领域的普通专业技术人员来说,可以对前述各实施例所记载的具体技术方案进行修改,或者对其中部分技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型所保护技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1