手术显微镜自动对焦系统的制作方法
1.本实用新型的实施例涉及手术显微镜技术领域,特别涉及手术显微镜自动对焦系统。
背景技术:
2.由于现有手术显微镜无法实现不同工作距离下的精确对焦,而不同科室对于手术显微镜的工作距离的焦距要求也不一样,如眼科在200mm工作距离,脊柱和五官科在250-300mm工作距离,神经外科在450-550mm工作距离,不同科室使用的器械大小长短不同,手术创面大小也不同,手术精细程度也有所差异.在不同科室手术间切换时,如何快速识别不同工作距离的焦距,保证手术视野的清晰度。实现多科室均可使用,对于手术显微镜提出了一定的要求。
技术实现要素:
3.本实用新型的实施方式的目的在于提供手术显微镜自动对焦系统。
4.为了实现上述目的,本实用新型的实施方式设计了手术显微镜自动对焦系统,包括显微镜本体,所述显微镜本体的内壁固定连接有手术显微镜镜头,手术显微镜镜头的底端固定连接有毫米波传感器,显微镜本体的内部一侧内壁固定连接有电动马达,电动马达的输出端通过联轴器连接有其中一个马达齿轮,其中一个马达齿轮通过传动机构连接有另外两个马达齿轮,三个马达齿轮上啮合有焦距调节齿条,焦距调节齿条的一侧固定连接于显微镜本体的内部另一侧内壁。
5.优选的,所述显微镜本体的顶部固定连接有焦距状态显示屏,焦距状态显示屏与毫米波传感器之间为电性连接。
6.优选的,所述显微镜本体的底部设有手术创面,手术创面位于毫米波传感器的正下方。
7.优选的,所述显微镜本体的一侧设有支撑架,支撑架的一侧开设有滑动槽,滑动槽内滑动连接有滑块,滑块的一端固定连接有l形支撑杆,l形支撑杆的顶端固定连接有固定柱,固定柱上转动套接有t形旋转块,t形旋转块的一端固定连接有固定板,固定板的一侧固定连接于显微镜本体的一侧。
8.优选的,所述滑动槽的顶部内壁开设有转动孔,转动孔内转动连接有螺纹杆,滑块的顶部开设有螺纹槽,螺纹杆的底端贯穿螺纹槽并转动连接于滑动槽的底部内壁。
9.优选的,所述固定柱的圆柱外侧壁开设有活动槽,活动槽内滑动连接有定位销,t形旋转块的内壁开设有多个插槽,定位销的一端延伸至其中一个插槽内,活动槽内设有挤压弹簧,挤压弹簧的两端分别与定位销和固定柱固定连接。
10.优选的,所述定位销的两侧均固定连接有限位块,活动槽的两侧内壁开设有限位槽,两个限位块分别位于两个限位槽内。
11.同现有技术相比,
12.本实用新型通过设置毫米波传感器,当安装在手术显微镜镜头底部的毫米波传感器检测到手术创面的距离后,能够实时显示在焦距状态显示屏上,通过电动马达转动带动马达齿轮在焦距调节齿条上移动,由于电动马达采用的是工业机器人所使用的精密减速机,具有较高的定位精度,调节到系统预设的焦距时马达自动停止工作,实现了手术显微镜能够自动进行快速对焦,提高了对焦的精度,保证了手术视野的清晰度,便于不同科室进行使用;
13.本实用新型通过转动螺纹杆带动滑块进行移动,滑块移动带动l形支撑杆、固定柱、t形旋转块、固定板和显微镜本体进行移动,使得显微镜本体能够进行高度调节,转动显微镜本体带动固定板和t形旋转块在固定柱上转动,t形旋转块在转动的过程中,在挤压弹簧的弹力作用显,使得定位槽能够及时进入插槽内将t形旋转块进行固定,进而将显微镜本体进行固定,实现了对显微镜本体进行高度和角度进行调节,进而使得显微镜本体灵活,使用效果好。
附图说明
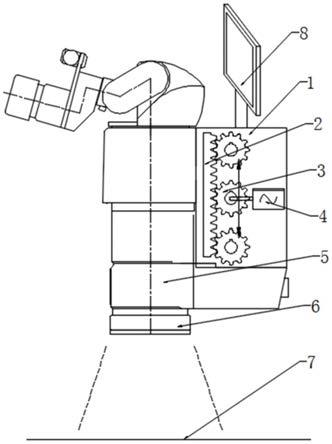
14.图1是本实用新型的第一剖面平面结构示意图;
15.图2是本实用新型的第二剖面平面结构示意图;
16.图3是本实用新型的定位销和挤压弹簧配合的剖面平面结构示意图;
17.图4是本实用新型的图3中a处剖面平面结构示意图。
18.附图标记说明:
19.1、显微镜本体;2、焦距调节齿条;3、马达齿轮;4、电动马达;5、手术显微镜镜头;6、毫米波传感器;7、手术创面;8、焦距状态显示屏;9、固定板;10、t形旋转块;11、固定柱;12、l形支撑杆;13、滑块;14、支撑架;15、螺纹杆;16、挤压弹簧;17、定位销;18、限位块。
具体实施方式
20.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术各权利要求所要求保护的技术方案。
21.本实施例中提供了一种手术显微镜自动对焦系统,如图1所示,包括显微镜本体1,显微镜本体1的内壁固定连接有手术显微镜镜头5,手术显微镜镜头5的底端固定连接有毫米波传感器6,显微镜本体1的内部一侧内壁固定连接有电动马达4,电动马达4的输出端通过联轴器连接有其中一个马达齿轮3,其中一个马达齿轮3通过传动机构连接有另外两个马达齿轮3,三个马达齿轮3上啮合有焦距调节齿条2,焦距调节齿条2的一侧固定连接于显微镜本体1的内部另一侧内壁;
22.本实施例中,通过电动马达4的设置,由于电动马达4采用的是工业机器人所使用的精密减速机,实现了具有较高的定位精度。当安装在手术显微镜镜头底部的毫米波传感器检测到手术创面的距离后,能够实时显示在焦距状态显示屏上。
23.为实现上述技术效果,如图1所示,显微镜本体1的顶部固定连接有焦距状态显示
屏8,焦距状态显示屏8与毫米波传感器6之间为电性连接;借由上述结构,通过毫米波传感器6的设置,实现了毫米波传感器6能够通过控制器及时将视野传送到焦距状态显示屏8上。
24.为实现上述技术效果,如图1所示,显微镜本体1的底部设有手术创面7,手术创面7位于毫米波传感器6的正下方;借由上述结构,通过手术创面7的设置,实现了毫米波传感器6能够及时感应到与手术创面7的距离,进而自动进行调焦。
25.实施例2:
26.基于本技术的第一实施例提供的手术显微镜自动对焦系统,本技术的第二实施例提出另手术显微镜自动对焦系统。第二实施例仅仅是第一实施例的优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
27.如图2-图4所示,显微镜本体1的一侧设有支撑架14,支撑架14的一侧开设有滑动槽,滑动槽内滑动连接有滑块13,滑块13的一端固定连接有l形支撑杆12,l形支撑杆12的顶端固定连接有固定柱11,固定柱11上转动套接有t形旋转块10,t形旋转块10的一端固定连接有固定板9,固定板9的一侧固定连接于显微镜本体1的一侧;借由上述结构,通过固定板9的设置,由于固定板9面积较大,实现了提高固定显微镜本体1的稳定性。
28.为实现上述技术效果,如图图2-图4所示,滑动槽的顶部内壁开设有转动孔,转动孔内转动连接有螺纹杆15,滑块13的顶部开设有螺纹槽,螺纹杆15的底端贯穿螺纹槽并转动连接于滑动槽的底部内壁;借由上述结构,通过螺纹杆15的设置,螺纹杆15转动带动滑块13进行升降,实现了对于显微镜进行高度调节。
29.为实现上述技术效果,如图图2-图4所示,固定柱11的圆柱外侧壁开设有活动槽,活动槽内滑动连接有定位销17,t形旋转块10的内壁开设有多个插槽,定位销17的一端延伸至其中一个插槽内,活动槽内设有挤压弹簧16,挤压弹簧16的两端分别与定位销17和固定柱11固定连接;借由上述结构,通过定位销17的设置,早挤压弹簧16的弹力作用下,实现了及时将显微镜本体1进行固定。
30.为实现上述技术效果,如图图2-图4所示,定位销17的两侧均固定连接有限位块18,活动槽的两侧内壁开设有限位槽,两个限位块18分别位于两个限位槽内;借由上述结构,通过限位块18的设置,实现了提高了定位销17在移动过程中的稳定性。
31.工作原理:当手术开始时,医生可以根据手术情况设定自己的手术焦距,当安装在手术显微镜镜头5底部的毫米波传感器6检测到手术创面7的距离后,能够实时显示在焦距状态显示屏8上,通过电动马达4转动带动马达齿轮3在焦距调节齿条2上移动,由于电动马达4采用的是工业机器人所使用的精密减速机,具有较高的定位精度,调节到系统预设的焦距时马达自动停止工作,实现了手术显微镜能够自动进行快速对焦,提高了对焦的精度,保证了手术视野的清晰度,便于不同科室进行使用。
32.转动螺纹杆15带动滑块13进行移动,滑块13移动带动l形支撑杆12、固定柱11、t形旋转块10、固定板9和显微镜本体1进行移动,使得显微镜本体1能够进行高度调节,转动显微镜本体1带动固定板9和t形旋转块10在固定柱11上转动,t形旋转块10在转动的过程中,在挤压弹簧16的弹力作用显,使得定位槽能够及时进入插槽内将t形旋转块10进行固定,进而将显微镜本体1进行固定,实现了对显微镜本体1进行高度和角度进行调节,进而使得显微镜本体1灵活,使用效果好。
33.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施
例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1