光学变焦马达的制作方法
1.本实用新型涉及手机摄像头技术领域,特别涉及一种光学变焦马达。
背景技术:
2.近年来随着市场需求,手机摄像头为适应新的发展趋势,具有高像素、大光圈、超薄型的要求。
3.现有的自动对焦装置均是利用音圈马达同镜头以及影像传感器、电路板累加高度形成,由于手机像素的提高以及产品高度要求越来越薄,现有技术在产品的使用上出现瓶颈。大光圈以及高像素的镜头整体的光学高度比较高,造成现有累计的产品高度无法满足超薄的产品需求。同时由于影像传感器的组装会出现偏差,造成光线中心和影像传感器中心无法重合,影响了影像传感器的成像质量,导致最终输出的照片达不到最佳的效果。
4.由于手机厚度的限制,采用水平放置的手机摄像头焦距较小,光学变焦能力有限,目前最高能达到3倍光学变焦。而潜望式摄像头区别于传统双摄镜头竖向排列方式,在手机内横向排放,并增加了光学转换部件,由光学传感器、滤光片、光学变焦马达、镜头组、棱镜等组成,以特殊的光学三棱镜让光线折射进入镜头组,实现成像,能够达到较高的光学变焦倍数,使远处物体拍摄更清晰。现有的光学变焦马达存在结构复杂、推力不足、行程不够的问题。
技术实现要素:
5.针对现有的光学变焦马达存在结构复杂、推力不足和行程不够的问题,本实用新型提出了一种光学变焦马达。
6.为了解决上述技术问题,本实用新型的技术方案为:
7.一种光学变焦马达,包括外壳、载体、弹簧、驱动磁石、驱动线圈、fpc、霍尔芯片和底座;所述fpc设置于所述底座上;两组所述驱动线圈并排设置于所述fpc上,分别与两个所述驱动磁石相对应;所述霍尔芯片设置于所述fpc上,对应其中一个所述驱动磁石设置;所述驱动磁石设置于所述载体的下端面;所述弹簧的两端分别与所述载体和所述底座固接,所述载体通过所述弹簧悬设;所述外壳与所述底座卡合,与所述载体四周及顶面均有运动间隙。
8.优选的,所述载体前后设有避让槽,所述弹簧安装在所述避让槽上。
9.优选的,所述载体四周设有点胶位,所述底座上设有立柱,所述点胶位和所述立柱之间设有阻尼胶,所述外壳通过所述立柱安装在所述底座上。
10.优选的,所述弹簧为弓形结构,上下两端通过热铆方式分别与所述载体和所述底座固定。
11.优选的,所述弹簧由金属材料制成,宽度与厚度比值为(8~12):1。
12.优选的,所述弹簧由sus304不锈钢材料制成。
13.优选的,所述底座上设有弹簧定位凸台,所述弹簧定位凸台上设有弹簧定位柱。
14.优选的,所述底座上设有驱动线圈定位凸台,所述驱动线圈绕设在所述驱动线圈定位凸台上。
15.优选的,所述载体的下端面设有安装凹槽,所述驱动磁石嵌设于所述安装凹槽内。
16.与现有技术相比,本实用新型的有益效果是:
17.本实用新型简化了弹簧以及马达整体结构,进而简化组装工艺,便于组装,同时能实现更大的驱动行程。本实用新型光学变焦马达底部左右并排设置两组驱动线圈,与对应的驱动磁石组感应,形成左右两组推力,实现更大的推力。同时,通过霍尔芯片感应,实现闭环控制,达到高精度驱动的目的。本实用新型结构简单、推力充足、行程大,能够满足现有手机摄像头高像素、大光圈和超薄型的要求。
18.当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
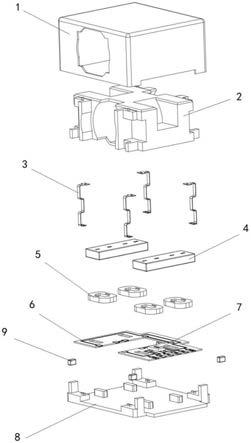
19.图1为本实用新型光学变焦马达的分解图;
20.图2为本实用新型光学变焦马达的装配图;
21.图3为本实用新型底座的结构图;
22.图4为本实用新型底座+载体+阻尼胶的装配图;
23.图5为本实用新型底座+弹簧+载体的装配图;
24.图6为本实用新型载体+驱动磁石的装配图;
25.图7为本实用新型驱动磁石+驱动线圈+fpc+霍尔芯片的装配图。
26.图中,1-外壳;2-载体;3-弹簧;4-驱动磁石;5-驱动线圈;6-fpc;7-霍尔芯片;8-底座;9-阻尼胶;10-避让槽;11-立柱;12-弹簧定位凸台;13-弹簧定位柱;14-驱动线圈定位凸台。
具体实施方式
27.下面结合附图对本实用新型的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本实用新型,但并不构成对本实用新型的限定。此外,下面所描述的本实用新型各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
28.以下请综合参考图1至图7,一种光学变焦马达,包括外壳1、载体2、弹簧3、驱动磁石4、驱动线圈5、fpc6、霍尔芯片7和底座8;fpc设置于底座8上;两组驱动线圈并排设置于fpc6上,分别与两个驱动磁石4相对应;霍尔芯片7设置于fpc6上,对应其中一个驱动磁石4设置;驱动磁石4设置于载体2的下端面;弹簧3的两端分别与载体2和底座8固接,载体2通过弹簧3悬设;外壳1与底座8卡合,与载体2四周及顶面均有运动间隙。
29.工作原理:两个驱动线圈5构成一组驱动线圈,两组驱动线圈分别与两个驱动磁石4对应,每组驱动线圈与对应位置的驱动磁石4的磁极作用,产生电磁力,驱动载体2沿z轴方向做直线运动,实现镜头的变焦与对焦功能。其中,霍尔芯片7设置于一组驱动线圈中间,即两个驱动线圈5中间,用于感应驱动磁石4对应位置的磁感应强度,通过计算,形成驱动磁石4的位置反馈,通过反馈控制驱动线圈5电流,使载体2达到既定的位置,实现驱动电路的闭环控制,使载体2内的镜头(透镜群)每次移位更精准,减少透镜群来回移动的次数,提高对
焦和变焦速度和灵敏度。
30.在一个实施例中,载体2前后设有避让槽10,弹簧3安装在避让槽10上。
31.本实施例中,载体2沿z轴前后设有避让槽10,弹簧3嵌设于避让槽10内,弹簧3通过底座8将载体2悬空支撑。
32.在一个实施例中,载体2四周设有点胶位,底座8上设有立柱11,点胶位和立柱11之间设有阻尼胶9,外壳1通过立柱11安装在底座8上。
33.本实施例中,底座8上设有四个立柱11,载体2四周的四个点胶位分别与四个立柱11的内侧通过阻尼胶9连接。阻尼胶9对马达的震颤起到一定缓震保护作用,提高马达驱动稳定性。外壳1沿着四个立柱11的外侧套入即可,方便安装外壳1。载体2设置于底座8与外壳1的封闭空间。
34.在一个实施例中,弹簧3为弓形结构,上下两端通过热铆方式分别与载体2和底座8固定。
35.本实施例中,载体2使用弹簧3支撑而不是悬丝支撑,现有技术中的载体2一般需要采用悬丝支撑,存在的问题是:一方面,悬丝易变形、断裂,定位易倾斜,不易组装,另一方面z轴的驱动行程有限,大行程时悬丝的承载力不够,悬丝易断以及悬丝两端焊点易脱落,导致结构稳定性差。弹簧3一方面起支撑载体2的重量作用,另一方面当载体2做z轴移动时,可形成z轴的弹性支撑,且能实现载体2z轴的大行程弹性支撑,即实现载体2的大行程z轴驱动。
36.在一个实施例中,弹簧3由金属材料制成,宽度与厚度比值为(8~12):1。
37.本实施例中,弹簧3采用不锈钢材料,优选sus304不锈钢材料。
38.在一个实施例中,底座8上设有弹簧定位凸台12,弹簧定位凸台12上设有弹簧定位柱13。
39.本实施例中,底座8上设有四个弹簧定位凸台12,每个弹簧定位凸台12上设有两个弹簧定位柱13,弹簧定位柱13方便对弹簧3进行定位安装。
40.在一个实施例中,底座8上设有驱动线圈定位凸台14,驱动线圈5绕设在驱动线圈定位凸台14上。
41.本实施例中,底座8上设有四个驱动线圈定位凸台14,四个驱动线圈5分别绕设在四个驱动线圈定位凸台14上,组成两组驱动线圈。
42.在一个实施例中,载体2的下端面设有安装凹槽,驱动磁石4嵌设于安装凹槽内。
43.本实施例中,载体2的下端面左右两侧分别设有一个安装凹槽,两个驱动磁石4分别安装在两个安装凹槽内。
44.在一个实施例中,驱动磁石4为采用多级充磁形成的一整块磁石或者由多块磁体叠加形成。
45.以上结合附图对本实用新型的实施方式作了详细说明,但本实用新型不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本实用新型原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1