一种光学变焦马达的制作方法
1.本实用新型属于驱动马达技术领域,尤其涉及一种光学变焦马达。
背景技术:
2.近年来随着市场需求,手机摄像头为适应新的发展趋势,具有高像素、大光圈、超薄型的要求。
3.现有的自动对焦装置均是利用音圈马达同镜头以及影像传感器、电路板累加高度形成,由于手机像素的提高以及产品高度要求越来越薄,现有技术在产品的使用上出现瓶颈。大光圈以及高像素的镜头整体的光学高度比较高,造成现有累计的产品高度无法满足超薄的产品需求。
4.目前广泛采用的水平放置的手机摄像头焦距较小,光学变焦能力有限,最高能达到3倍光学变焦。而潜望式摄像头区别于传统双摄镜头竖向排列方式,在手机内横向排放,并增加了光学转换部件,由光学传感器、滤光片、光学变焦马达、镜头组、棱镜等组成,以特殊的光学三棱镜让光线折射进入镜头组,实现成像,能够达到较高的光学变焦倍数,使远处物体拍摄更清晰。现有的光学变焦马达当同时实现对焦和防抖功能时,通过多组弹簧支撑做对焦和防抖移动,存在结构复杂、推力不足的问题。
技术实现要素:
5.为解决上述问题,本实用新型的目的是提供一种光学变焦马达,该马达具有在底部、顶部设置两组驱动组件,降低了两组驱动组件之间的磁干扰,在底部左右并排设置两组线圈,与对应的磁石组感应,形成左右两组推力,实现更大的推力。
6.为实现上述目的,本实用新型的技术方案为:
7.一种光学变焦马达,包括:
8.透镜载体,所述透镜载体内部用于容置透镜;
9.第一驱动组件,包括设置在所述透镜载体上表面的第一驱动磁石和设置在所述透镜载体上部的第一柔性电路板,所述第一柔性电路板上设置有第一驱动线圈;
10.第二驱动组件,包括设置在所述透镜载体下表面的第二驱动磁石和设置在所述透镜载体下部的第二柔性电路板,所述第二柔性电路板上设置有第二驱动线圈。
11.所述光学变焦马达分别在底部、顶部设置两组驱动组件,降低了两组驱动组件之间的磁干扰。
12.进一步的,所述第一柔性电路板上设置有两组第一驱动线圈,相应地,所述透镜载体上表面设置两组所述第一驱动磁石,在所述2组第一驱动线圈之一的内部设置有第一霍尔芯片,用于感应所述第一驱动磁石对应位置的磁感应强度。左右并排设置两组第一驱动线圈,与对应的磁石组感应,形成左右两组推力,实现更大的推力。同时第一驱动组件通过所述第一霍尔芯片感应,实现闭环控制,达到高精度防抖驱动的目的。
13.进一步的,所述第二柔性电路板上设置有2组第二驱动线圈,在所述2组第二驱动
线圈中间设置有第二霍尔芯片用于感应所述第二驱动磁石对应位置的磁感应强度。左右并排设置两组第二驱动线圈,与对应的磁石组感应,形成左右两组推力,实现更大的推力。同时第二驱动组件通过所述第二霍尔芯片感应,实现闭环控制,达到高精度对焦驱动的目的。
14.进一步的,所述透镜载体的下表面四角分别设置有至少一个滚珠安装槽,所述滚珠安装槽内安装有滚珠,所述光学变焦马达还包括有设置于所述第二柔性电路板下方的底座,所述底座与所述滚珠相对应位置设置有滚珠槽。
15.进一步的,所述滚珠槽的直径大于所述滚珠的直径。
16.取消现有的对焦防抖驱动装置复杂的弹簧结构,采用滚珠直接代替,不仅可实现载体的支撑,还能同时驱动载体做对焦防抖移动,不仅结构简单,同时降低了驱动阻力,提高马达的响应速度、降低功耗。
17.优选的,所述透镜载体上表面对称设置有第一凹槽,所述第一驱动磁石设置在所述第一凹槽内。
18.优选的,所述透镜载体下表面对称设置有第二凹槽,所述第二驱动磁石设置在所述第二凹槽内。
19.在所述透镜载体的上表面和下表面设置有所述第一凹槽和所述第二凹槽,使得所述第一驱动磁石和所述第二驱动磁石的连接紧密,并且节省空间。
20.进一步的,所述第二柔性电路板与所述底座之间设置有阻尼胶。
21.进一步的,所述光学变焦马达还包括有外壳,所述外壳和底座可拆卸连接,所述外壳和所述底座形成的容置空间用于容置所述透镜载体、所述第一柔性电路板和所述第二柔性电路板。
22.进一步的,所述透镜载体在所述外壳和所述底座形成的容置空间的四周及顶部具有冗余空间以允许所述透镜载体移动。
23.本实用新型由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
24.本实用新型实施例分别在底部、顶部设置两组驱动组件,降低了两组驱动组件之间的磁干扰,在底部左右并排设置两组线圈,与对应的磁石组感应,形成左右两组推力,实现更大的推力。同时两组驱动组件分别通过霍尔芯片感应,实现闭环控制,达到高精度对焦、防抖驱动的目的。取消现有的对焦防抖驱动装置复杂的弹簧结构,采用滚珠直接代替,不仅可实现载体的支撑,还能同时驱动载体做对焦、防抖移动,不仅结构简单,同时降低了驱动阻力,提高马达的响应速度、降低功耗。所述光学变焦马达具有结构简单,驱动阻力小,推力大,响应速度快,功耗低的优点。
附图说明
25.下面结合附图对本实用新型的具体实施方式作进一步详细说明,其中:
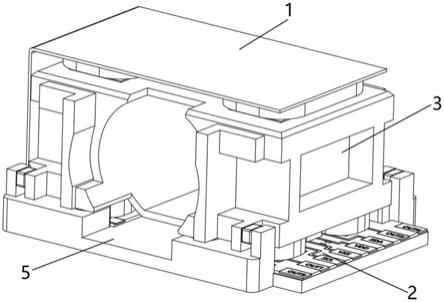
26.图1为本实用新型光学变焦马达的立体结构的示意图;
27.图2为本实用新型光学变焦马达的结构爆炸示意图;
28.图3为本实用新型第一驱动组件的立体结构的示意图;
29.图4为本实用新型第二驱动组件的立体结构的示意图;
30.图5为本实用新型透镜载体的立体结构的示意图;
31.图6为本实用新型透镜载体的立体结构的示意图;
32.附图标记说明:
33.1:第一驱动组件;101:第一驱动磁石;102:第一柔性电路板;103:第一驱动线圈;104:第一霍尔芯片;2:第二驱动组件;201:第二驱动磁石;202:第二柔性电路板;203:第二驱动线圈;204:第二霍尔芯片;3:透镜载体;301:第一凹槽;302:第二凹槽;303:滚珠安装槽;304:滚珠;4:阻尼胶;5:底座;501:滚珠槽;6:外壳。
具体实施方式
34.以下结合附图和具体实施例对本实用新型作进一步详细说明。根据下面说明和权利要求书,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比率,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
35.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
36.本实用新型的核心是提供一种光学变焦马达,包括:
37.用于容置透镜的透镜载体;
38.第一驱动组件,包括设置在透镜载体上表面的第一驱动磁石和设置在透镜载体上部的第一柔性电路板,第一柔性电路板上设置有第一驱动线圈;
39.第二驱动组件,包括设置在透镜载体下表面的第二驱动磁石和设置在透镜载体下部的第二柔性电路板,第二柔性电路板上设置有第二驱动线圈。
40.光学变焦马达分别在底部、顶部设置两组驱动组件,降低了两组驱动组件之间的磁干扰。
41.实施例
42.如图1-图2所示,一种光学变焦马达,包括:
43.透镜载体3,透镜载体3内部用于容置透镜;
44.第一驱动组件1,包括设置在透镜载体3上表面的第一驱动磁石101和设置在透镜载体3上部的第一柔性电路板102,第一柔性电路板102上设置有第一驱动线圈103;
45.第二驱动组件2,包括设置在透镜载体3下表面的第二驱动磁石201和设置在透镜载体3下部的第二柔性电路板202,第二柔性电路板202上设置有第二驱动线圈203。
46.光学变焦马达分别在透镜载体3底部、顶部设置两组驱动组件(1、2),降低了两组驱动组件之间的磁干扰。
47.如图3所示,第一柔性电路板102上设置有两组第一驱动线圈103,相应地,透镜载体3上表面设置两组第一驱动磁石101,在2组第一驱动线圈103之一的内部设置有第一霍尔芯片104,用于感应第一驱动磁石101对应位置的磁感应强度。左右并排设置两组第一驱动线圈103,与对应的磁石组感应,形成左右两组推力,实现更大的推力。同时第一驱动组件1通过第一霍尔芯片104感应,实现闭环控制,达到高精度防抖驱动的目的。
48.如图4所示,第二柔性电路板202上设置有2组第二驱动线圈203,在2组第二驱动线圈203中间设置有第二霍尔芯片204用于感应所述第二驱动磁石201对应位置的磁感应强度。左右并排设置两组第二驱动线圈203,与对应的磁石组感应,形成左右两组推力,实现更
大的推力。同时第二驱动组件2通过第二霍尔芯片204感应,实现闭环控制,达到高精度对焦驱动的目的。
49.进一步的,如图6所示,透镜载体3的下表面四角分别设置有至少一个滚珠安装槽303,滚珠安装槽303内安装有滚珠304,光学变焦马达还包括有设置于第二柔性电路板下方的底座5,底座5与滚珠304相对应位置设置有滚珠槽501。
50.进一步的,滚珠槽501的直径大于滚珠304的直径。
51.取消现有的对焦防抖驱动装置复杂的弹簧结构,采用滚珠304直接代替,不仅可实现透镜载体3的支撑,还能同时驱动透镜载体3做对焦、防抖移动,不仅结构简单,同时降低了驱动阻力,提高马达的响应速度、降低功耗。
52.优选的,透镜载体3上表面对称设置有第一凹槽301,第一驱动磁石101设置在第一凹槽301内。
53.优选的,透镜载体3下表面对称设置有第二凹槽302,第二驱动磁石201设置在第二凹槽301内。
54.在透镜载体3的上表面和下表面设置有第一凹槽301和第二凹槽302,使得第一驱动磁石101和第二驱动磁石201与透镜载体3的连接更紧密,并且节省空间。
55.进一步的,第二柔性电路板202与底座5之间设置有阻尼胶4。
56.进一步的,光学变焦马达还包括有外壳6,外壳6和底座5可拆卸连接,外壳6和底座5形成的容置空间用于容置透镜载体3、第一柔性电路板102和第二柔性电路板202。
57.进一步的,透镜载体3在外壳6和底座5形成的容置空间的四周及顶部具有冗余空间以允许透镜载体3移动。
58.下面对本实用新型工作过程作进一步说明:
59.当需要进行定焦操作时,通过控制第二驱动线圈203的电流使产生相应磁力,通过产生的磁力驱动第二驱动磁石201带动透镜载体3移动,从而实现透镜的定焦操作;当需要进行防抖操作时,通过控制第一驱动线圈103的电流使产生相应磁力,通过产生的磁力驱动第一驱动磁石101带动透镜载体3移动,从而实现透镜的防抖操作。设置的第一霍尔芯片104和第二霍尔芯片204分别用于感应对应磁石的磁感强度,并分别将信号反馈给第一驱动组件和第二驱动组件,以实现闭环控制。
60.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式。即使对本实用新型作出各种变化,倘若这些变化属于本实用新型权利要求及其等同技术的范围之内,则仍落入在本实用新型的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1