透镜驱动装置、摄像机模块及摄像机搭载装置的制作方法
1.本发明涉及透镜驱动装置、摄像机模块及摄像机搭载装置。
背景技术:
2.以往,已知搭载于智能手机等薄型的摄像机搭载装置的摄像机模块。作为这种摄像机模块,已知具备透镜驱动装置的摄像机模块,该透镜驱动装置具有进行被拍摄物像的放大或缩小的变焦功能。
3.例如,在专利文献1中公开了一种结构,该结构具备:来自被拍摄物的光所入射的固定透镜;通过固定透镜折射后的光所入射的两个可动透镜;以及使两个可动透镜沿光轴的方向移动的透镜驱动部。
4.该透镜驱动部具有进给丝杠机构,该进给丝杠机构是基于与两个可动透镜的每一个对应的电机的机构。各电机分别在摄像机模块的壳体中的与固定透镜及可动透镜相邻的区域中,设置于光轴的方向上的两端侧。在各电机的驱动轴上设置有卡合螺母,该卡合螺母与可动透镜的框架卡合,能够通过驱动轴的旋转而在驱动轴上移动。卡合螺母通过电机的旋转驱动而在驱动轴上移动,由此可动透镜移动。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2018-36416号公报
技术实现要素:
8.发明要解决的问题
9.然而,在小型的摄像机搭载装置中,需要与摄像机搭载装置相应地使透镜驱动装置小型化,所以存在透镜驱动装置的小型化所引起的、装置刚性降低的问题。另外,在如专利文献1所记载的结构那样设置有两个比较大的步进电机的结构中,若考虑到可动透镜的移动量,则有可能透镜驱动装置的外形过大。
10.本发明的目的在于提供能够在确保装置的刚性的同时实现小型化的透镜驱动装置、摄像机模块及摄像机搭载装置。
11.解决问题的方案
12.本发明的透镜驱动装置具备:
13.第一可动部和第二可动部,在光轴的方向上配置,分别能够保持第一可动透镜和第二可动透镜;
14.配置于所述第一可动部和所述第二可动部的第一驱动部和第二驱动部,该第一驱动部和第二驱动部沿所述光轴的方向分别对所述第一可动部和所述第二可动部进行驱动,在所述第一可动部和所述第二可动部中,所述第一驱动部和所述第二驱动部均配置于夹着所述光轴的两端中的一端侧;以及
15.引导部,配置于所述一端侧,对所述第一可动部和所述第二可动部的各自的在所
述光轴的方向上的移动进行引导,
16.所述第一驱动部具有第一超声电机和与所述第一可动部连接的第一框架,
17.所述第二驱动部具有第二超声电机和与所述第二可动部连接的第二框架,
18.所述第一超声电机和所述第二超声电机在所述一端侧沿所述光轴的方向并排配置,并沿所述光轴的方向分别对所述第一可动部和所述第二可动部独立地进行驱动,
19.所述引导部具有多个引导轴,该多个引导轴均在所述光轴的方向上延伸且彼此间隔开配置,该多个引导轴进行协作,从而以使所述第一框架和所述第二框架能够沿所述光轴的方向移动的方式对所述第一框架和所述第二框架这两者进行支撑。
20.本发明的摄像机模块具备:
21.上述的透镜驱动装置;
22.透镜部,包括被保持于所述第一可动部和所述第二可动部的所述第一可动透镜和所述第二可动透镜;以及
23.摄像部,对通过所述透镜部成像的被拍摄物像进行摄像,
24.所述摄像机模块沿所述光轴的方向对所述第一可动透镜和所述第二可动透镜进行驱动。
25.本发明的摄像机搭载装置为信息设备或运输设备,且具备:
26.上述的摄像机模块;以及
27.摄像控制部,对由所述摄像机模块得到的图像信息进行处理。
28.发明效果
29.根据本发明,能够在确保装置的刚性的同时实现小型化。
附图说明
30.图1是简单地表示本发明的实施方式的摄像机模块的图。
31.图2是简单地表示从侧面观察到的本实施方式的摄像机模块的结构的图。
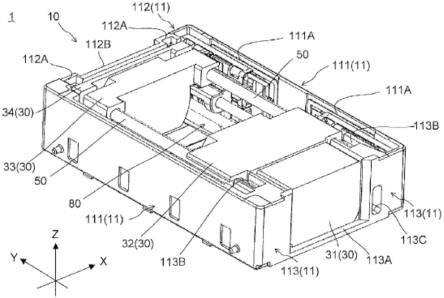
32.图3是表示摄像机模块的壳体部分的立体图。
33.图4是摄像机模块的壳体部分中的底壁部侧的立体图。
34.图5是壳体和透镜部的分解立体图。
35.图6是壳体中的侧壁部和底壁部的分解立体图。
36.图7是从z方向+侧观察壳体的图。
37.图8是从x方向上的-侧观察壳体的内侧的图。
38.图9是表示被引导部的图。
39.图10是表示透镜部与框架的连接部分的图。
40.图11是被引导部和夹设部的分解立体图。
41.图12a是用于说明磁铁与位置检测部之间的位置关系的图。
42.图12b是用于说明磁铁与位置检测部之间的位置关系的图。
43.图12c是用于说明磁铁与位置检测部之间的位置关系的图。
44.图13a是用于说明夹设部与引导轴之间的位置关系的调整的图。
45.图13b是用于说明夹设部与引导轴之间的位置关系的调整的图。
46.图14是表示第二夹设部件的图。
47.图15是表示夹设部与超声电机的配置关系的图。
48.图16是超声电机的立体图。
49.图17是超声电机的分解立体图。
50.图18是共振部与夹设部的接触部分的放大图。
51.图19是用于说明引导部的结构的图。
52.图20是用于说明引导部的结构的图。
53.图21a是表示搭载有摄像机模块的智能手机的图。
54.图21b是表示搭载有摄像机模块的智能手机的图。
55.图22a是表示搭载有摄像机模块的汽车的图。
56.图22b是表示搭载有摄像机模块的汽车的图。
具体实施方式
57.下面,基于附图对本发明的实施方式进行详细说明。图1是简单地表示本发明的实施方式的摄像机模块1的图。图2是简单地表示从侧面观察到的本实施方式的摄像机模块1的结构的图。
58.摄像机模块1例如搭载于智能手机m(参照图21a、图21b)、便携电话机、数码摄像机、笔记本电脑、平板终端、便携式游戏机、车载摄像机等薄型的摄像机搭载装置
59.在对本实施方式的摄像机模块1的结构的说明中,使用正交坐标系(x,y,z)。在后述的图中,也用相同的正交坐标系(x,y,z)来进行表示。例如以如下方式搭载摄像机模块1,即,在摄像机搭载装置实际进行拍摄的情况下,x方向为左右方向,y方向为上下方向,z方向为前后方向。来自被拍摄物的光从z方向-侧(负侧)入射,经折射后被向y方向+侧(正侧)导光。通过使摄像机模块1的z方向上的厚度变薄,能够实现摄像机搭载装置的薄型化。
60.如图1所示,摄像机模块1具备:壳体10、反射驱动部20、透镜部30、摄像部40、支撑轴50(参照图3)、透镜驱动部60(参照图5)、位置检测部70(参照图10)、引导部80(参照图3)以及驱动控制部100。
61.驱动控制部100具备cpu(central processing unit,中央处理器)、rom(read only memory,只读存储器)、ram(random access memory,随机存储器)等。cpu从rom读出与处理内容相应的程序并在ram中展开,与所展开的程序协同操作,来对透镜驱动部60进行集中控制。由此,驱动控制部100将容纳于壳体10的透镜部30的后述的第二透镜单元32和第三透镜单元33在y方向(光轴的方向)上驱动。其结果为,摄像机模块1进行无级光学变焦和自动聚焦。壳体10、支撑轴50、透镜驱动部60、位置检测部70、引导部80及驱动控制部100与本发明的“透镜驱动装置”对应。
62.另外,如图2所示,在摄像机模块1中,入射光l1经由反射驱动部20入射至壳体10。反射驱动部20具有反射壳体21、反射镜22及反射驱动控制部23。在图1和图2所示的例子中,反射壳体21与壳体10的y方向上的-侧的端部相邻地配置。反射镜22设置于反射壳体21内,将入射光l1作为反射光l2向壳体10反射。反射驱动控制部23具有cpu、rom、ram等,控制反射镜22的方向。
63.另外,本实施方式的反射镜22具有在x方向和z方向上延伸的两个旋转轴(未图示)。在反射驱动部20中,在反射驱动控制部23的控制之下,反射镜22以该旋转轴为中心进
行旋转。由此,使得摄像机模块1具有对拍摄时产生的抖动(振动)进行光学修正以减轻图像模糊的抖动修正功能(ois(optical image stabilization,光学防抖)功能)。
64.入射至壳体10内的反射光l2经由容纳于壳体10内的透镜部30输出至摄像部40。
65.摄像部40配置于壳体10的y方向上的+侧的外侧面(后述的第二壁112的配置部112b),构成为使反射光l2经由透镜部30入射。摄像部40具有摄像元件和基板等(未图示)。
66.摄像元件例如由ccd(charge coupled device,电荷耦合器件)型图像传感器、cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)型图像传感器等构成。摄像元件安装于基板,通过接合线与基板上的配线电连接。摄像元件对通过透镜部30成像的被拍摄物像进行摄像,并输出与被拍摄物像对应的电信号。
67.另外,印刷配线基板(未图示)与摄像部40的基板电连接,通过该印刷配线基板进行向摄像元件的供电以及由摄像元件拍摄到的被拍摄物像的电信号的输出。该电信号被输出至设置于摄像机搭载装置的摄像控制部200。摄像控制部200具备cpu、rom、ram等,对由摄像机模块1得到的图像信息进行处理。摄像控制部200只要搭载于摄像机搭载装置即可,但也可以内置于摄像机模块1。
68.如图3所示,壳体10对透镜部30、支撑轴50、透镜驱动部60(也参照图5)及引导部80进行容纳,例如作为整体具有长方体形状。壳体10具有侧壁部11和底壁部12。
69.侧壁部11是具有向y方向-侧开口的部分的、例如树脂制的壁部,且具有第一壁111、第二壁112、第三壁113及第四壁114(也参照图7等)。
70.第一壁111构成为沿y方向延伸,且在x方向上的两侧设置有一对。在一对第一壁111中,x方向上的+侧的第一壁111上的壳体10的内侧面设置有配置部111a,该配置部111a用于配置后述的超声电机。配置部111a分别设置于x方向上的+侧的第一壁111上的、y方向上的中央部的两侧。
71.另外,如图4所示,在x方向上的+侧的第一壁111上设置有端子部111c。端子部111c具有例如通过在第一壁111与底壁部12之间所形成的间隙而遍及壳体10的内外地配置的端子(未图示)。该端子的配置于壳体10的外侧的部分与摄像机搭载装置的规定配线连接。
72.另外,在第一壁111的底面(z方向上的-侧的面)形成有供底壁部12的定位部121卡合的被卡合部111b。
73.如图3和图4所示,第二壁112构成沿x方向延伸,以连接一对第一壁111的y方向上的+侧的端部的方式设置。另外,在第二壁112中的顶面(z方向上的+侧的面)的部分,在x方向上的两侧分别设置有对支撑轴50进行支撑的支撑部112a。在第二壁112的外侧面设置有配置部112b,该配置部112b用于配置摄像部40。
74.另外,在第二壁112的配置部112b内设置有引导支撑部112c和开口部112d。在本实施方式中,引导支撑部112c是支撑后述的引导轴81、82的孔,设置于配置部112b内的比开口部112d更靠x方向上的-侧的位置。在z方向上并排地设置有两个引导支撑部112c。开口部112d是供透镜部30的第四透镜单元34嵌合的开口,设置于配置部112b内的x方向上的中央部。
75.如图3和图5所示,第三壁113设置于一对第一壁111的y方向上的-侧的端部的每一个。一对第三壁113以包围由第一壁111和第二壁112构成的空间的方式分别设置。在一对第三壁113之间,隔开了可供透镜部30的第一透镜单元31进入的程度的间隔,且设置有将各第
三壁113的z方向上的-侧的端部桥连的桥连部113a。
76.另外,在一对第三壁113的顶面(z方向上的+侧的面)上设置有对支撑轴50进行支撑的支撑部113b。在一对第三壁113的z方向上的中央部附近设置有对后述的引导轴81、82进行支撑的引导支撑部113c。
77.引导支撑部113c是长孔,该长孔的z方向上的长度构成为与上述的第二壁112上的两个引导支撑部112c的配置范围对应的长度。引导支撑部113c能够对引导轴81、82进行支撑,该引导轴81、82被第二壁112上的两个引导支撑部112c的每一个支撑。
78.如图5所示,第四壁114构成由各第一壁111、与第一壁111对应的第三壁113及第二壁112构成的空间的底壁,设置于在x方向上与第三壁113对应的区域(也参照图7)。因此,在x方向上的两侧的第四壁114之间空开了间隔。
79.如图4~图6所示,底壁部12是构成壳体10的底壁的例如大致矩形的金属板,以将x方向上的两侧的第四壁114与一对第一壁111桥连的方式设置。底壁部12通过嵌件成型与包括一对第一壁111的底部的、侧壁部11的底面部分一体化。另外,在底壁部12的y方向上的-侧的端部的部分被切除,使得在与第一透镜单元31对应的部分不存在底壁部12的部分。
80.在底壁部12的x方向上的两侧端部设置有定位部121。定位部121从底壁部12的两侧端部突出地设置,与上述的第一壁111的被卡合部111b卡合。由此,能够进行底壁部12的y方向上的定位。
81.另外,图6所示,在底壁部12中的x方向和y方向上的侧端部设置有弯折部122。通过将该侧端部向z方向上的+侧弯折,来设置弯折部122。
82.另外,在壳体10的与弯折部122对应的部分形成有供弯折部122进入的槽(未图示)。通过使弯折部122进入该槽,底壁部12被固定于壳体10。
83.另外,在底壁部12的面上形成有在y方向上并排的多个半冲孔123。半冲孔123遍及底壁部12的x方向而设置。在本实施方式中,总共设置有6个半冲孔123。
84.通过这样设置半冲孔123,能够提高壳体10的底壁部分的强度。
85.如图3和图5所示,透镜部30设置于包括来自反射驱动部20的反射光l2(参照图2)所通过的区域的、夹在一对第一壁111之间的区域。透镜部30具有在y方向上并排配置的第一透镜单元31、第二透镜单元32、第三透镜单元33及第四透镜单元34。
86.第一透镜单元31配置于反射光l2的入射方向(朝向y方向上的+侧的方向)的最上游侧,固定于壳体10中的一对第三壁113之间。
87.第一透镜单元31的侧面例如构成为,以z方向上的中央部分呈凸状的方式弯曲。第三壁113的第一透镜单元31侧的侧面例如具有沿着第一透镜单元31的侧面的形状,且构成为可供第一透镜单元31的弯曲部分嵌入。由此,第一透镜单元31被固定于一对第三壁113之间。
88.第二透镜单元32配置于在入射方向上比第一透镜单元31更靠下游侧的位置,且具有主体部32a和被支撑部32b。第三透镜单元33配置于在入射方向上比第二透镜单元32更靠下游侧的位置,且具有主体部33a和被支撑部33b。第二透镜单元32与本发明的“第一可动部”对应,第三透镜单元33与本发明的“第二可动部”对应。
89.各主体部32a、33a是对透镜进行保持的部分,该透镜供通过了第一透镜单元31的光通过。被支撑部32b、33b是以能够移动的方式被支撑轴50支撑的部分,分别设置于各主体
部32a、33a的x方向上的两侧。
90.第二透镜单元32的主体部32a中包括的透镜与本发明的“第一可动透镜”对应。第三透镜单元33的主体部33a中包括的透镜与本发明的“第二可动透镜”对应。
91.第四透镜单元34配置于入射方向上的最下游侧,构成为包括透镜。第四透镜单元34在与壳体10的第二壁112相邻的位置,被支撑轴50支撑。另外,如图4所示,在本实施方式中,在第四透镜单元34的y方向上的+侧的面上设置有凸部34a。
92.应予说明,对于第一~第四透镜单元31~34中的透镜,既可以在透镜驱动装置的制造时组装到壳体10中,也可以在用透镜驱动装置制造摄像机模块1时组装到壳体10中。
93.凸部34a具有能够与第二壁112的开口部112d嵌合的大小。通过该凸部34a与开口部112d嵌合,第四透镜单元34被固定于壳体10。
94.如图3和图5所示,支撑轴50例如由不锈钢等构成。支撑轴50沿y方向延伸,设置于一对第三壁113的每一个区域。在本实施方式中,各支撑轴50构成为彼此相等的长度,被第三壁113的支撑部113b和第二壁112的各支撑部112a支撑。
95.透镜驱动部60分别与第二透镜单元32和第三透镜单元33对应地设置,在上述的驱动控制部100的控制之下,使第二透镜单元32和第三透镜单元33中的对应的一者独立地移动。透镜驱动部60配置于x方向上的+侧的、被第一壁111、第二壁112及第三壁113包围的第四壁114的区域。也就是说,如图7所示,透镜驱动部60配置于壳体10的、第二透镜单元32和第三透镜单元33中的夹着光轴o的两端中的一端侧。
96.在本实施方式中,两个透镜驱动部60在y方向上并排地设置。y方向上的-侧的透镜驱动部60沿y方向对第二透镜单元32进行驱动;y方向上的+侧的透镜驱动部60沿y方向对第三透镜单元33进行驱动。也就是说,y方向上的-侧的透镜驱动部60与本发明的“第一驱动部”对应,y方向上的+侧的透镜驱动部60与本发明的“第二驱动部”对应。
97.在本实施方式中,各透镜驱动部60具有大致相同的结构,因此在以下的说明中,除非另有说明,仅对与第二透镜单元32对应的透镜驱动部60进行说明,并省略与第三透镜单元33对应的透镜驱动部60的说明。另外,在本实施方式中,各透镜驱动部60在y方向上对称配置,因此,与第三透镜单元33对应的透镜驱动部60中的y方向上的+侧及-侧的关系和与第二透镜单元32对应的透镜驱动部60中的y方向上的+侧及-侧的关系相反。
98.透镜驱动部60具有框架61、连接部62、夹设部63及超声电机64。
99.框架61通过连接部62与第二透镜单元32和第三透镜单元33的被支撑部32b、33b中的任一者连接。
100.y方向上的-侧的框架61与本发明的“第一框架”对应,y方向上的+侧的框架61与本发明的“第二框架”对应。
101.框架61构成为通过引导部80对在光轴o的方向(y方向)上的移动进行引导,能够在光轴o的方向上移动。若框架61沿光轴o的方向移动,则借助于连接部62与框架61连接的第二透镜单元32或第三透镜单元33也沿着支撑轴50移动。
102.如图8和图9所示,框架61具有被引导部611和磁铁保持部612。被引导部611是被引导部80引导沿框架61的y方向的移动的部分,设置于x方向上的、与引导部80对应的位置。被引导部611具有第一部分611a、第二部分611b、第三部分611c及第四部分611d。
103.第一部分611a是构成框架61的顶面(z方向上的+侧的面)的部分,构成为在光轴的
方向(y方向)上延伸。第一部分611a设置为从z方向上的+侧覆盖引导部80。
104.另外,在第一部分611a的z方向上的+侧的表面设置有连接部62。如图10所示,连接部62是固定于如下部分的板状的弹簧部件(弹性部件),该部分是框架61的z方向上的+侧的表面以及第二透镜单元32和第三透镜单元33的被支撑部32b、33b中的任一者的y方向上的-侧的表面。通过由弹簧部件构成连接部62,即使因制造公差等而导致框架61与被支撑部32b、33b之间的位置关系偏离,也能够通过弹簧部件的弹力来吸收位置关系的偏离。
105.如图8~图10所示,第二部分611b是从第一部分611a的y方向上的-侧的端部(第一部分611a的一端)向z方向(规定方向)的-侧延伸并支撑第一引导轴81和第二引导轴82的部分。
106.在第二部分611b形成有沿y方向贯穿的轴孔611e。轴孔611e设置于与后述的第一引导轴81对应的位置,且供第一引导轴81通过。
107.另外,在第二部分611b中的z方向上的-侧的端部形成有轴卡合部611f。轴卡合部611f设置于能够与后述的第二引导轴82卡合的位置,从z方向上的+侧与第二引导轴82卡合。
108.第三部分611c是从第一部分611a的y方向上的+侧的端部(第一部分611a的另一端)向z方向(规定方向)的-侧延伸并支撑第二引导轴82的部分。更详细地,第三部分611c延伸至z方向上的-侧的端部与第二引导轴82之间隔开规定间隔的位置。
109.在第三部分611c形成有沿y方向贯穿的轴孔611g。轴孔611g设置于与第一引导轴81对应的位置,且供第一引导轴81通过。
110.第四部分611d是从第一部分611a的x方向上的+侧的端部延伸的部分。第四部分611d设置在第一部分611a的整个y方向上,配置为从x方向上的+侧覆盖引导部80。
111.另外,在第四部分611d与引导部80(第二引导轴82)之间设置有吸收部613。吸收部613由弹簧部件构成,配置于第四部分611d与第二引导轴82之间。吸收部613将第二引导轴82相对于第四部分611d向x方向上的-侧施力。由此,吸收部613吸收框架61与引导部80之间的位置关系的偏离。
112.如图10和图11所示,磁铁保持部612是保持位置检测用的磁铁部614的部分,从第四部分611d的z方向上的-侧的端部向x方向上的-侧延伸。在磁铁保持部612的z方向上的-侧的端部形成有凹部612a,在凹部内保持有磁铁部614。
113.磁铁部614具有在x方向上并排设置的两个磁铁614a、614b。
114.另外,在壳体10中的与磁铁部614对置的部分设置有位置检测部70。位置检测部70例如是对框架61的y方向上的位置进行检测的霍尔元件,基于规定的基准位置来检测磁铁部614的位置。规定的基准位置是两个磁铁614a、614b各自共同的位置,例如设定于底壁部12的y方向上的+侧或-侧的端部等适当的位置。
115.在磁铁部614中,一个磁铁614a以使n极与位置检测部70对置的方式配置,另一个磁铁614b以使s极与位置检测部70对置的方式配置。也就是说,两个磁铁614a、614b在沿磁铁部614与位置检测部70所对置的方向(本实施方式中为z方向)的方向上,且以使不同的磁极与位置检测部70对置的方式,分别被磁化。
116.磁铁614a、614b以彼此接触的状态配置。因此,在磁铁部614中的与位置检测部70对置的对置面614c上,不同的磁极相邻地配置。
117.另外,如图12a、图12b及图12c所示,磁铁部614相对于y方向倾斜地配置。也就是说,磁铁部614中的不同的磁极间的边界614d相对于光轴(y方向)倾斜地延伸。
118.通过这样设置,能够与框架61沿z方向的移动对应地改变位置检测部70与磁铁部614的对置部分中的n极的比例和s极的比例改变。
119.例如,如图12a所示,在框架61的位置是y方向上的最靠-侧的位置的情况下,位置检测部70与磁铁部614的y方向上的+侧的端部对置。位置检测部70与在该端部中的、n极的磁铁614a的比例较大的部分对置。
120.随着框架61向y方向上的+侧移动,磁铁部614也与框架61一起移动,因此位置检测部70在磁铁部614中的对置部分发生变化。由于磁铁部614是倾斜的,与位置检测部70的对置部分中的、s极的比例逐渐增大。
121.如图12b所示,在框架61移动到位置检测部70与框架61的中央部分对置的位置的情况下,s极(磁铁614b)的比例与n极(磁铁614a)的比例大致均等的部分成为与位置检测部70的对置部分。
122.另外,如图12c所示,在框架61移动到位置检测部70与框架61的y方向上的+侧的端部对置的位置的情况下,s极(磁铁614b)的比例较大的部分成为与位置检测部70的对置部分。
123.由此,能够使位置检测部70所检测的磁力的强度按框架61的位置而不同,因此能够通过位置检测部70来精度良好地检测框架61的y方向上的位置。
124.另外,y方向上的两侧的透镜驱动部60中的磁铁部614配置为,在y方向上对置时,以彼此相同的磁极对置。也就是说,y方向上的-侧的磁铁部614中的磁铁614a在距y方向上的+侧的磁铁部614中的磁铁614a较近的位置与该磁铁614a对置。另外,y方向上的-侧的磁铁部614中的磁铁614b在距y方向上的+侧的磁铁部614中的磁铁614b较近的位置,与该磁铁614b对置。
125.通过这样设置,例如,即使y方向上的两侧的透镜驱动部60中的框架61处于最接近位置,两个框架61的磁铁部614也难以相互吸附,因此能够抑制框架61的y方向上的位置偏离。
126.另外,如图10和图11所示,在磁铁保持部612的上方设置有夹设部63。夹设部63具有第一夹设部件631和第二夹设部件632。
127.第一夹设部件631例如由平板状的金属部件构成,粘接于框架61的第四部分611d的x方向上的+侧的表面。在第四部分611d的x方向上的+侧的表面设置有两个突起部d1、d2。
128.两个突起部d1、d2从第四部分611d的表面突出,在y方向上并排配置。在本实施方式中,突起部d1设置于第四部分611d中的y方向上的中央部附近,突起部d2设置于第四部分611d中的y方向上的+侧的端部附近。
129.第一夹设部件631与光轴的方向(y方向)平行地配置,具有与两个突起部d1、d2卡合的卡合孔631a、631b。
130.卡合孔631a配置于第一夹设部件631的y方向上的中央部附近,且与突起部d1卡合。卡合孔631a形成为如下程度的大小:能够与突起部d1卡合,且能够使夹设部63(第一夹设部件631)以突起部d1所卡合的卡合孔631a为中心旋转。
131.卡合孔631b配置于第一夹设部件631的y方向上的+侧的端部附近,且与突起部d2
卡合。卡合孔631b形成为如下的大小:能够与突起部d2卡合,且具有能够使卡合孔631b的内缘相对于突起部d2移动的程度的间隔(参照图13b)。
132.如图13a和图13b所示,通过这样形成卡合孔631a、631b,能够使夹设部63以卡合孔631a(突起部d1)为中心在卡合孔631b的范围内旋转。其结果为,能够以使夹设部63的接触部632b与引导轴平行的方式,调整夹设部63的姿势。
133.如图11所示,第二夹设部件632例如由板状的金属部件构成,例如粘接固定于第一夹设部件631。第二夹设部件632具有主体部632a和接触部632b。
134.主体部632a是具有与光轴的方向(y方向)平行的平面且粘接固定于第一夹设部件631的部分。在主体部632a上形成有用于供框架61中的第四部分611d的两个突起部d1、d2通过的孔a1、a2。
135.接触部632b是超声电机64的振子所接触的部分,通过将主体部632a的z方向上的两侧的端部向与透镜部相反的一侧弯折来构成。由此,连接一对接触部632b的主体部632a以从x方向-侧覆盖超声电机64的方式配置,接触部632b以夹住超声电机64(共振部641)的方式配置。
136.通过这样构成夹设部63,力从超声电机64的振子作用于接触部632b,从而在夹设部63产生朝向光轴的方向(y方向)的推力。其结果为,能够从夹设部63向框架61赋予使框架61沿着光轴的方向(y方向)移动的推力。
137.另外,如图14所示,在主体部632a与接触部632b的连接部分632c形成有多个开口c1、c2、c3、c4。多个开口c1、c2、c3、c4在该连接部分的y方向上的两侧沿y方向并排地配置,每一侧各配置4个。
138.在4个开口c1、c2、c3、c4中的、y方向上的中央侧的两个开口c2、c3构成为:与y方向上的两端侧的两个开口c1、c4的相比,y方向上的长度更长,且z方向上的长度更长。
139.另外,在连接部分632c中,通过形成4个开口c1、c2、c3、c4,来构成在光轴的方向上隔开间隔地并排的5个连接部632d。
140.在本实施方式中,对于各连接部632d的y方向(光轴的方向)上的宽度,越是位于从y方向上的中央向外侧远离的位置的连接部632d,其y方向上的宽度越宽。具体而言,y方向上的正中央的连接部632d是5个连接部632d之中宽度最窄的。y方向上的两端的连接部632d是5个连接部632d之中宽度最宽的。位于正中央的连接部632d与两端的连接部632d之间的连接部632d的宽度比正中央的连接部632d的宽度宽,且比两端的连接部632d的宽度窄。
141.对于连接部632d(连接部分632c),越是位于靠近端部的位置强度越弱,因此在本实施方式中,通过在连接部分632c处改变开口c1、c2、c3、c4的大小和连接部632d的宽度,来调整连接部分632c的强度。
142.通过如上述那样构成,能够将接触部632b的各位置处的由振子641b施加的按压力在y方向整体上均等化。其结果为,例如当在搭载于智能手机等便携终端的装置中启动无级光学变焦功能时,即使使可动部在比较长的移动范围内移动,也能够稳定地产生夹设部63的移动力。
143.另外,如图10和图11所示,在两个接触部632b的彼此相对的面的每一个上设置有磨损抑制部632e。
144.磨损抑制部632e是用于抑制超声电机64的振子641b与接触部632b接触时的磨损
的部件。磨损抑制部632e由硬度比接触部632b高的材料(例如,氧化锆等陶瓷)构成,遍及接触部632b的y方向而设置。
145.如图15和图16所示,超声电机64是产生用于使框架61移动的驱动力的驱动源,固定配置于x方向上的+侧的第一壁111的各自的配置部111a(参照图3等)。超声电机64具有共振部641、压电元件642、第一电极643及第二电极644。
146.y方向上的-侧的超声电机64与本发明的“第一超声电机”对应,y方向上的+侧的超声电机64与本发明的“第二超声电机”对应。
147.共振部641例如由导电材料形成,与压电元件642的振动共振,将该振动运动转换为框架61的直线运动。具体而言,共振部641基于压电元件642的振动,向相对于光轴的方向(y方向)倾斜的倾斜方向振动而按压夹设部63,从而经由夹设部63对框架61产生沿光轴的方向移动的推力。共振部641配置为夹在夹设部63中的两个接触部632b之间。如图17所示,共振部641具有躯干部641a、两个振子641b、突出部641c及通电部641d。
148.躯干部641a是例如构成为大致矩形且被压电元件642夹持的部分。两个振子641b从躯干部641a的z方向上的两端部沿y方向延伸。两个振子641b具有对称的形状,各自的自由端部与夹设部63的接触部632b接触。两个振子641b与本发明的“第一振子”和“第二振子”对应。
149.突出部641c从躯干部641a的z方向上的中央部向y方向上的+侧延伸。通电部641d从躯干部641a的z方向上的中央部向与突出部641c相反的一侧(y方向上的-侧)延伸。
150.压电元件642例如是由陶瓷材料形成的例如板状的振动元件,通过施加高频电压来产生振动。压电元件642设置有两个,分别配置为在x方向上将共振部641的躯干部641a夹入。
151.第一电极643具有夹持共振部641和压电元件642的夹持部643a以及被施加电压的电极部643b。第一电极643经由夹持电元件642等的夹持部643a,对压电元件642施加电压。第二电极644与共振部641的通电部641d电连接。第一电极643和第二电极644在壳体10的内侧与上述的端子部111c的端子接触。
152.两个压电元件642贴合于共振部641的躯干部641a,并被第一电极643夹持,从而它们彼此电连接。例如,供电路径的一方与第一电极643连接,另一方与第二电极644连接,由此对压电元件642施加电压,产生振动。
153.共振部641至少具有两个共振频率,并相对于各个共振频率以不同的动作变形。换言之,共振部641的整体形状被设定为使共振部641相对于两个共振频率以不同的动作变形。不同的动作是指,通过夹设部63使框架61向y方向上的+侧移动的动作以及通过夹设部63使框架61向y方向上的-侧移动的动作。
154.如图18所示,共振部641以使夹设部63的一对接触部632b中的一者与振子641b对置的方式配置,因此在两个振子641b变形时,振子641b的前端从各接触部632b的与之对置的一侧向相对于y方向倾斜的方向按压接触部632b(参照箭头a)。
155.在各接触部632b被振子641b的前端向箭头a方向按压时,在各接触部632b处产生要向振子641b侧返回的反作用力。换言之,夹设部63基于各振子641b与一对接触部632b的接触,产生从一对接触部632b的外侧朝向内侧的方向的反作用力。
156.由于因夹设部63相对于振子641b的按压的反作用力而在振子641b与接触部632b
之间产生的摩擦,在夹设部63产生朝向y方向的推力。伴随于此,对与夹设部63粘接的框架61赋予沿y方向移动的推力(参照箭头b)。其结果为,与框架61连接的第二透镜单元32或第三透镜单元33沿y方向移动。
157.另外,由于接触部632b构成为沿y方向延伸,从而接触部632b通过被振子641b按压而以进行滑动的方式与振子641b接触并在y方向上移动。因此,接触部632b被振子641b连续地按压,从而能够使与夹设部63粘接的框架61连续地在y方向上移动。应予说明,在某一共振频率下,振子641b的按压方向是箭头a方向而接触部632b的滑动方向是箭头b方向,相对于此,在另一共振频率下,振子641b的按压方向是箭头c方向而接触部632b的滑动方向是箭头d方向。
158.这样的驱动动作由在x方向上的两侧的第一壁111的每一个上所设置的超声电机64的每一个进行。也就是说,各超声电机64沿光轴的方向分别对第二透镜单元32和第三透镜单元33独立地进行驱动。
159.如图19所示,由引导部80对这些移动进行引导。引导部80配置于x方向上的+侧的、由第一壁111、第二壁112及第三壁113包围的第四壁114的区域。也就是说,引导部80配置于壳体10的、第二透镜单元32和第三透镜单元33中的夹着光轴o的两端中的一端侧(也参照图7)。
160.引导部80具有第一引导轴81和第二引导轴82,该第一引导轴81和第二引导轴82均在光轴的方向(y方向)上延伸且彼此间隔开配置,并且该第一引导轴81和第二引导轴82进行协作,从而以使两个框架61能够沿光轴的方向移动的方式对两个框架61的两者进行支撑。第一引导轴81和第二引导轴82例如由不锈钢等构成,且被壳体10中的光轴的两端侧(x方向上的两端侧)的第二壁112和第三壁113d的各引导支撑部(省略图示)支撑。第二壁112和第三壁113与从本发明的底壁(第四壁114)延伸的“一对壁”对应。
161.第一引导轴81是通过对框架61中的被引导部611的第二部分611b和第三部分611c进行支撑来对框架61的移动进行引导的引导轴。
162.第二引导轴82是在比第一引导轴81更靠z方向上的-侧(第四壁114侧)的位置与第一引导轴81平行地配置,且通过对(卡合)框架61中的被引导部611的第二部分611b进行支撑来对框架61的移动进行引导的引导轴。另外,第一引导轴81和第二引导轴82配置于如下位置,即x方向上的位置与上述的支撑轴50大致相同的位置(参照图10)。
163.第二引导轴82由设置于第四壁114的轴承部114a支撑。轴承部114a在两个框架61之间设置为从第四壁114向z方向上的+侧突出,配置在第二引导轴82的y方向上的中央部附近的范围内。第二引导轴82粘接固定于轴承部114a。另外,轴承部114a在x方向(夹着光轴的两端之间)上配置在包括第二引导轴82的中心82a的范围内(参照图10)。
164.另外,轴承部114a设置于能够与框架61的第二部分611b接触的位置。因此,在框架61向y方向上的+侧移动时,框架61的第二部分611b与轴承部114a接触(参照图20)。由此,轴承部114a对框架61的移动进行限制。轴承部114a与本发明的“限制部”对应。
165.根据如以上那样构成的本实施方式,作为对两个透镜驱动部60的移动进行引导的引导轴设置有两个引导轴即第一引导轴81和第二引导轴82,因此能够提高壳体10的强度。
166.具体而言,例如,在壳体10被赋予外力时,施加到引导轴的应力被分散至第一引导轴81和第二引导轴82这两个引导轴。其结果为,能够在整体上缓和施加到壳体10的力,因此
能够提高壳体10的强度。
167.另外,在本实施方式中,在透镜驱动部60中使用将共振部641、压电元件642等较薄的板状部件贴合在一起而构成的超声电机64,因此能够减小驱动源的配置空间。其结果为,与使用步进电机等作为驱动源的结构相比,能够使摄像机模块1(透镜驱动装置)小型化。
168.即,在本实施方式中,能够在确保装置的刚性的同时实现小型化。
169.另外,通过设置第一引导轴81和第二引导轴82,能够限制框架61的绕轴的旋转。
170.另外,第一引导轴81和第二引导轴82由壳体10的第二壁112和第三壁113支撑,由此能够进一步提高壳体10的整个y方向上的强度。
171.另外,轴承部114a对框架61的移动进行限制,因此能够抑制框架61过度移动。其结果为,能够减少两个框架61碰撞的情况。另外,能够缓和两个框架61碰撞时的冲击力。
172.另外,轴承部114a与框架61中的被引导部611的第二部分611b接触。第二部分611b设置于被引导部611中距轴承部114a较远的一侧的端部,与将第二部分611b设置于距轴承部较近的一侧的端部的结构相比,能够相应地增加框架61的行程量。
173.另外,轴承部114a在x方向上设置在包括第二引导轴82的中心82a的范围内,因此第二引导轴82的z方向上的-侧的部分由轴承部114a稳定地支撑。因此,在壳体10掉落时等壳体10被赋予外力的情况下,也能够抑制第二引导轴82向z方向弯曲,因此能够提高壳体10的强度。
174.另外,通过将轴承部114a粘接固定于第二引导轴82,还能够抑制第二引导轴82的x方向上的弯曲。
175.另外,在第四部分611d与第二引导轴82之间设置有吸收部613,因此能够通过吸收部613将第二引导轴82按压到构成轴卡合部611f的壁部分。其结果为,能够吸收制造公差等所引起的、框架61与吸收部613之间的位置关系的偏离,因此能够在框架61的移动时保持稳定的姿势,进而能够抑制移动阻力不均。
176.另外,第二引导轴82与框架61中的第三部分611c隔开间隔地配置,因此在第一引导轴81向z方向弯曲时,第三部分611c与第二引导轴82接触。通过使该间隔尽可能小,即使例如在第一引导轴81塑性变形的情况下,也能够通过第二引导轴82从z方向上的-侧支撑第一引导轴81,因此能够减少第一引导轴81的变形量。
177.另外,在夹设部63中的接触部632b设置有磨损抑制部632e。磨损抑制部632e由硬度比夹设部63高的材料构成,因此与使接触部直接与振子641b接触的结构相比,能够抑制因与振子641b的接触而引起的磨损。另外,通过设置磨损抑制部632e,能够加强接触部632b,因此能够抑制接触部632b的弯曲。
178.另外,第一引导轴81和第二引导轴82配置于在x方向上与支撑轴50大致相同的位置,因此能够将这些轴的配置范围保持在x方向上的一定范围内。其结果为,能够减小x方向上的宽度,因此能够实现装置的小型化。
179.应予说明,在上述实施方式中采用具有两个引导轴的结构,但本发明不限于此,例如也可以构成为具有3个以上的引导轴。
180.另外,在上述实施方式中,对各框架61分别设置一个位置检测部70,但本发明不限于此,例如,也可以在光轴的方向(y方向)上并排设置多个位置检测部70。通过这样构成,能够进一步提高框架61的位置检测的精度。
181.另外,在上述实施方式中,支撑轴50设置于x方向上的两侧,但本发明不限于此,也可以仅将支撑轴50设置于x方向上的一侧。
182.另外,在上述实施方式中,壳体10中的侧壁部11和底壁部12是通过嵌件成型形成的,但本发明不限于此,也可以将底壁部粘接固定于侧壁部11。
183.另外,在上述实施方式中采用具有由第二透镜单元32和第三透镜单元33构成的两个可动透镜的结构,但本发明不限于此,也可以是具有上以上的可动透镜的结构。
184.另外,在上述实施方式中采用具有4个透镜单元的结构,但本发明不限于此,只要是至少具有两个可动透镜的结构,则设置几个透镜单元都可以。
185.另外,在上述实施方式中,将板状的金属部件弯折来构成夹设部63,但本发明不限于此,对于构成夹设部的主体部和接触部,也可以用分开的部件来构成。
186.另外,在上述实施方式中,框架61和夹设部63由不同的部件构成,但本发明不限于此。例如,也可以将框架61和夹设部63一体地构成。即,透镜驱动部也可以具有移动部,该移动部以如下方式与各透镜单元的每一个连接:跟随共振部的共振而在光轴的方向上移动,并传递光轴的方向上的移动。
187.另外,在上述实施方式中,连接框架61与透镜单元的连接部62由弹簧部件构成,但本发明不限于此,只要是具有弹性的部件,则可以由任何部件构成。
188.另外,在上述实施方式中,使用磁铁部614检测框架61的位置,但本发明不限于此,也可以是通过其他方法检测框架的位置的结构。
189.另外,在上述实施方式中,框架61的第三部分611c与第二引导轴82隔开间隔地配置,但本发明不限于此,也可以是第三部分还对第二引导轴进行支撑的结构。
190.另外,在上述实施方式中,在第三部分611c的与第二引导轴82的对置部分处未设置任何部件,但本发明不限于此,也可以在该对置部分设置冲击缓冲部件等。
191.另外,在上述实施方式中采用底壁部具有弯折部和半冲孔的结构,但本发明不限于此,也可以是不具有弯折部和半冲孔的结构。
192.另外,在上述实施方式中采用共振部641具有两个振子641b的结构,但本发明不限于此,例如也可以是具有一个振子的结构。
193.另外,在上述实施方式中,分别地设置了驱动控制部、反射驱动控制部及摄像控制部,但本发明不限于此,驱动控制部、反射驱动控制部及摄像控制部中的至少两者也可以由一个控制部构成。
194.另外,在上述实施方式中,设置了轴承部114a作为限制部,但本发明不限于此,既可以与轴承部分开设置限制部,也可以不设置具有限制部的功能的部分。
195.另外,在上述实施方式中设置了轴承部114a,但本发明不限于此,也可以不设置轴承部。
196.另外,在上述实施方式中设置了吸收部613,但本发明不限于此,也可以不设置吸收部。
197.另外,例如,在上述实施方式中,作为具备摄像机模块1的摄像机搭载装置的一例,举出作为带有摄像机的便携终端的智能手机进行了说明,但本发明能够应用于具有摄像机模块及对由摄像机模块得到的图像信息进行处理的图像处理部的摄像机搭载装置。摄像机搭载装置包括信息设备和运输设备。信息设备例如包括带有摄像机的便携电话机、笔记本
电脑、平板终端、便携式游戏机、web摄像机、无人机、带有摄像机的车载装置(例如,后方监控装置、行车记录仪装置)。另外,运输设备例如包括汽车和无人机。
198.图22a、图22b是表示作为搭载有车载用摄像机模块vc(vehicle camera,车用摄像机)的摄像机搭载装置的汽车v的图。图22a是汽车v的主视图,图22b是汽车v的后方立体图。汽车v搭载有实施方式中说明的摄像机模块1作为车载用摄像机模块vc。如图22a和图22b所示,车载用摄像机模块vc例如朝向前方安装于挡风玻璃,或者朝向后方安装于尾门。该车载用摄像机模块vc作为后方监控用、行车记录仪用、碰撞避免控制用、自动驾驶控制用等的车载用摄像机模块被使用。
199.此外,上述实施方式都仅表示实施本发明的具体化的一例,本发明的技术范围不应受这些实施方式的限制。即,能够不脱离其要点或其主要特征地以各种形式实施本发明。例如,在上述实施方式中说明的各部的形状、尺寸、数量及材料只不过是一例,可以适当变更来实施。
200.在2020年1月14日提出的美国专利申请62/960727中包括的说明书、附图及说明书摘要的公开内容全部引用于本技术。
201.工业实用性
202.本发明的透镜驱动装置作为能够在确保装置的刚性的同时实现小型化的透镜驱动装置、摄像机模块及摄像机搭载装置,是有用的。
203.附图标记说明
204.1 摄像机模块
205.10 壳体
206.11 侧壁部
207.12 底壁部
208.20 反射驱动部
209.21 反射壳体
210.22 反射镜
211.23 反射驱动控制部
212.30 透镜部
213.31 第一透镜单元
214.32 第二透镜单元
215.32a 主体部
216.32b 被支撑部
217.33 第三透镜单元
218.33a 主体部
219.33b 被支撑部
220.34 第四透镜单元
221.34a 凸部
222.40 摄像部
223.50 支撑轴
224.60 透镜驱动部
225.61 框架
226.62 连接部
227.63 夹设部
228.64 超声电机
229.70 位置检测部
230.80 引导部
231.81 第一引导轴
232.82 第二引导轴
233.100 驱动控制部
234.111 第一壁
235.111a 配置部
236.111b 被卡合部
237.111c 端子部
238.112 第二壁
239.112a 支撑部
240.112b 配置部
241.112c 引导支撑部
242.112d 开口部
243.113 第三壁
244.113a 桥连部
245.113b 支撑部
246.113c 引导支撑部
247.114 第四壁
248.114a 轴承部
249.121 定位部
250.122 弯折部
251.123 半冲孔
252.200 摄像控制部
253.611 被引导部
254.611a 第一部分
255.611b 第二部分
256.611c 第三部分
257.611d 第四部分
258.612 磁铁保持部
259.613 吸收部
260.614 磁铁部
261.614a 磁铁
262.614b 磁铁
263.614c 对置面
264.614d 边界
265.631 第一夹设部件
266.631a 卡合孔
267.631b 卡合孔
268.632 第二夹设部件
269.632a 主体部
270.632b 接触部
271.632c 连接部分
272.632d 连接部
273.632e 磨损抑制部
274.641 共振部
275.641a 躯干部
276.641b 振子
277.641c 突出部
278.641d 通电部
279.642 压电元件
280.643 第一电极
281.643a 夹持部
282.643b 电极部
283.644 第二电极
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1