一种放射科室用X片定位观察设备的制作方法
一种放射科室用x片定位观察设备
技术领域
1.本发明涉及一种x片定位观察设备,尤其涉及一种放射科室用x片定位观察设备。
背景技术:
2.西医诊断与中医诊断区别较大,中医诊断是通过望闻问切来判断患者所换的病症,这种诊断方法需要经验的累积才能做到,西医诊断则简单很多,通过各种仪器对身体进行检查最后得出结果即可,其中放射科室内的x片是目前各大医院中较为常用的一种疾病诊断确认方法,放射科室拍出的x片需要专门的医生进行阅片,非专业医生难以通过观察x片而对患者确诊,而医生对于x片的阅读往往采用对着光亮的地方进行阅读,对着光亮处阅读往往需要将x片高举、抬头阅读,此阅读过程中阅片者需要高举手臂、仰头等姿势配合,而这些姿势需要保持一定时间容易令人产生疲劳感。
3.因此,需研发一种无须手持,且阅片方便可以降低疲劳感的放射科室用x片定位观察设备。
技术实现要素:
4.为了克服阅片时,需高举x片抬头阅读的缺点,要解决的技术问题是:提供一种无须手持,且阅片方便可以降低疲劳感的放射科室用x片定位观察设备。
5.本发明的技术方案为:一种放射科室用x片定位观察设备,包括有:底座、立杆、升降机构和展示机构,底座顶部一侧中间设有立杆,立杆上设有升降机构,升降机构部件上设有对x片进行放置的展示机构。
6.作为本发明的一种优选技术方案,升降机构包括有第一连杆、第一电动推杆和安装块,立杆内部一侧滑动式设有第一连杆,立杆上部外壁对称设有第一电动推杆,第一电动推杆伸缩杆顶部均设有安装块,安装块顶部均与第一连杆连接。
7.作为本发明的一种优选技术方案,展示机构包括有第二连杆、斜拉索、第一滑杆、转块、透光板、第二电动推杆和触发开关,第一连杆上远离底座的一侧对称设有第二连杆,第二连杆一侧均与第一连杆顶部之间连接有斜拉索,第二连杆远离第一连杆的一侧均滑动式设有第一滑杆,第一滑杆向背的一侧均设有第二电动推杆,第二电动推杆伸缩杆一侧均与同侧的第二连杆连接,第一滑杆一侧均转动式设有转块,转块均与同侧的第一滑杆之间连接有两个扭力弹簧,转块一侧之间连接有透光板,第一连杆顶部设有触发开关。
8.作为本发明的一种优选技术方案,还包括有夹紧机构,夹紧机构包括有l型板、第二滑杆、复位弹簧、第三连杆、磁石和第一电磁铁,透光板一侧对称设有l型板,l型板上均对称滑动式设有第二滑杆,相近的l型板一侧之间均连接有第三连杆,第三连杆两侧均与同侧的l型板之间连接有复位弹簧,第三连杆一侧中间均设有第一电磁铁,l型板一侧中间均设有磁石。
9.作为本发明的一种优选技术方案,还包括有清理机构,清理机构包括有导向杆、刮刀、第二电磁铁和距离传感器,透光板一侧对称设有导向杆,导向杆中部之间滑动式连接有
两个刮刀,刮刀中部均对称设有第二电磁铁,相近的两个第二电磁铁相互配合,一侧的刮刀内部设有距离传感器。
10.作为本发明的一种优选技术方案,还包括有角度调整机构,角度调整机构包括有第四连杆、机构外箱、第五连杆、齿条杆、驱动电机、第一齿轮、导向槽和转杆,底座顶部中间设有三个第四连杆,第四连杆上部之间滑动式设有机构外箱,机构外箱顶部与第一连杆上部之间设有第五连杆,机构外箱内部滑动式设有齿条杆,机构外箱内部设有驱动电机,驱动电机输出轴与机构外箱转动式连接,驱动电机输出轴上设有第一齿轮,透光板一侧设有导向槽,导向槽内部滑动式设有转杆,转杆一侧与齿条杆远离机构外箱的一侧连接。
11.作为本发明的一种优选技术方案,还包括有光线调整机构,光线调整机构包括有u型连接板、转轴、第二齿轮、第三齿轮、灯罩和led灯,机构外箱内部一侧设有u型连接板,u型连接板一侧转动式连接有两个转轴,一侧的转轴中部设有第二齿轮,第二齿轮与第一齿轮啮合,转轴一侧均设有第三齿轮,两个第三齿轮相互啮合,上侧的转轴中部设有灯罩,灯罩内部设有led灯。
12.作为本发明的一种优选技术方案,还包括有控制箱,底座顶部与一侧中间设有控制箱,控制箱包括有开关电源、电源模块和控制模块,开关电源为整个设备供电,开关电源输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;触发开关和距离传感器都与控制模块通过电性连接,第一电动推杆、第二电动推杆、第一电磁铁、第二电磁铁和led灯都与控制模块通过继电器控制模块连接,驱动电机与控制模块通过直流电机正反转模块连接。
13.本发明具有以下优点:1、控制第三连杆带动第二滑杆往左移动,在复位弹簧的作用下,使得第二滑杆对x片进行固定,如此,便可防止x片脱落。
14.2、触发开关控制第二电磁铁通电,使得第二电磁铁带动刮刀移动,对透光板上的灰尘进行刮除,距离传感器控制第二电磁铁断电,可以防止刮刀一直往外侧移动,导致损坏设备。
15.3、距离传感器控制驱动电机带动第一齿轮转动,进而带动齿条杆、转杆和导向槽转动,使得导向槽带动透光板转动,如此,便可对透光板的角度进行调节,方便医生对x片进行观察。
附图说明
16.图1为本发明的立体结构示意图。
17.图2为本发明的部分立体结构示意图。
18.图3为本发明的升降机构立体结构示意图。
19.图4为本发明的展示机构第一种立体结构示意图。
20.图5为本发明的展示机构第二种立体结构示意图。
21.图6为本发明的夹紧机构立体结构示意图。
22.图7为本发明的清理机构第一种立体结构示意图。
23.图8为本发明的清理机构第二种立体结构示意图。
24.图9为本发明的角度调整机构第一种立体结构示意图。
25.图10为本发明的角度调整机构第二种立体结构示意图。
26.图11为本发明的光线调整机构第一种立体结构示意图。
27.图12为本发明的光线调整机构第二种立体结构示意图。
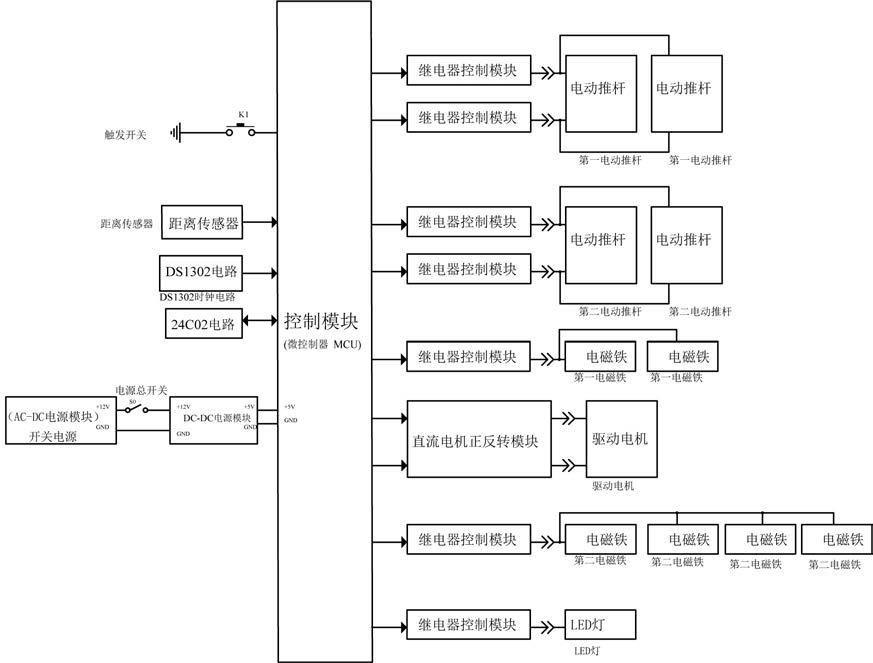
28.图13为本发明的电路框图。
29.图14为本发明的电路原理图。
30.图中标记为:1-底座,2-立杆,3-控制箱,4-升降机构,41-第一连杆,42-第一电动推杆,43-安装块,5-展示机构,51-第二连杆,52-斜拉索,53-第一滑杆,54-转块,55-透光板,56-第二电动推杆,57-触发开关,6-夹紧机构,61-l型板,62-第二滑杆,63-复位弹簧,64-第三连杆,65-磁石,66-第一电磁铁,7-清理机构,71-导向杆,72-刮刀,73-第二电磁铁,74-距离传感器,8-角度调整机构,81-第四连杆,82-机构外箱,83-第五连杆,84-齿条杆,85-驱动电机,86-第一齿轮,87-导向槽,88-转杆,9-光线调整机构,91-u型连接板,92-转轴,93-第二齿轮,94-第三齿轮,95-灯罩,96-led灯。
具体实施方式
31.下面结合具体的实施例来对本发明做进一步的说明,还需要说明的是,除非另有明确的规定和限定,术语如:设置、安装、相连、连接应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
32.实施例1一种放射科室用x片定位观察设备,如图1-14所示,包括有底座1、立杆2、升降机构4和展示机构5,底座1顶部左侧中间设有立杆2,立杆2上设有升降机构4,升降机构4部件上设有展示机构5。
33.升降机构4包括有第一连杆41、第一电动推杆42和安装块43,立杆2内部上侧滑动式设有第一连杆41,立杆2上部前后对称设有第一电动推杆42,第一电动推杆42伸缩杆顶部均设有安装块43,安装块43顶部均与第一连杆41连接。
34.展示机构5包括有第二连杆51、斜拉索52、第一滑杆53、转块54、透光板55、第二电动推杆56和触发开关57,第一连杆41上部前后对称设有第二连杆51,第二连杆51左侧均与第一连杆41顶部之间连接有斜拉索52,第二连杆51右侧均滑动式设有第一滑杆53,第一滑杆53外侧均设有第二电动推杆56,第二电动推杆56伸缩杆左侧均与同侧的第二连杆51连接,第一滑杆53右侧均转动式设有转块54,转块54均与同侧的第一滑杆53之间连接有两个扭力弹簧,转块54右侧之间连接有透光板55,第一连杆41顶部设有触发开关57。
35.医生在对患者进行手术时,可以借助本设备进行固定x片,由于病床有高有底,医护人员按下电源总开关将本设备上电,本设备上电之后,控制模块控制第一电动推杆42启动,第一电动推杆42伸缩杆带动安装块43往上移动,进而带动第一连杆41往上移动,第一连杆41带动触发开关57、第二连杆51、第一滑杆53、第二电动推杆56、转块54和透光板55往上移动,第一电动推杆42运行三十秒后自行关闭,使得透光板55刚好移动至方便医生观察的高度,医护人员将x片放在透光板55上,再借助手电筒,将手电筒固定在第一连杆41上部,使得手电筒位于透光板55左侧,进而开启手电筒对透光板55进行打光,方便医生可以更加清
晰的观察x片,当本设备距离病床较远时,按下触发开关57,触发开关57发出信号,控制模块接收信号控制第二电动推杆56启动,第二电动推杆56伸缩杆带动第一滑杆53往右移动,进而带动转块54和透光板55往右移动,如此,便可对透光板55进行调节,使得透光板55带动x片移动至方便医生观察的位置,第二电动推杆56运行十秒后自行关闭,医护人员可以根据光源的位置进行转动透光板55,方便医生更好的观察x片上病灶所在之处,进而方便医生确定下刀的位置,透光板55转动带动转块54转动,此时扭力弹簧发生形变,不需要看x片时,医护人员松开透光板55,扭力弹簧复位,带动透光板55和转块54复位,将手电筒关闭,再次按压触发开关57,触发开关57发出信号,控制模块接收信号控制第一电动推杆42和第二电动推杆56启动,第一电动推杆42伸缩杆带动安装块43及以上部件复位,第二电动推杆56伸缩杆带动第一滑杆53、转块54和透光板55复位,运行十秒后,第一电动推杆42和第二电动推杆56关闭。
36.还包括有夹紧机构6,夹紧机构6包括有l型板61、第二滑杆62、复位弹簧63、第三连杆64、磁石65和第一电磁铁66,透光板55右侧前后对称设有l型板61,l型板61上均上下对称滑动式设有第二滑杆62,相近的l型板61右侧之间均连接有第三连杆64,第三连杆64左侧的上下两侧均与同侧的l型板61之间连接有复位弹簧63,第三连杆64左侧中间均设有第一电磁铁66,l型板61右侧中间均设有磁石65。
37.医生将x片放在透光板55上,按下触发开关57,触发开关57发出信号,控制模块接收信号控制第一电磁铁66通电,第一电磁铁66对磁石65进行吸附,进而带动第三连杆64往左移动,第三连杆64带动第二滑杆62往左移动,此时复位弹簧63被压缩,使得第二滑杆62压住x片,对x片进行固定,如此,便可防止x片脱落,再次按压触发开关57,触发开关57发出信号,控制模块接收信号控制第一电磁铁66断电,使得第一电磁铁66停止对磁石65吸附,此时复位弹簧63复位,带动第三连杆64和第二滑杆62复位,使得第二滑杆62松开x片,医生将x片取走即可。
38.还包括有清理机构7,清理机构7包括有导向杆71、刮刀72、第二电磁铁73和距离传感器74,透光板55左侧前后对称设有导向杆71,导向杆71中部均设有凸块,导向杆71中部之间滑动式连接有两个刮刀72,刮刀72中部均前后对称设有第二电磁铁73,相近的两个第二电磁铁73相互配合,上侧的刮刀72内部设有距离传感器74。
39.由于导向杆71带有磁性,刮刀72为铁质,刮刀72上与透光板55接触的位置为硅胶材质,使得导向杆71对刮刀72进行吸附,可防止刮刀往下移动,按下触发开关57,触发开关57发出信号,控制模块接收信号控制第二电磁铁73通电,通电后的第二电磁铁73为同性电磁铁,第二电磁铁73通电后带动刮刀72和距离传感器74往外侧移动,使得刮刀72对透光板55上的灰尘进行刮除,距离传感器74检测到移动的距离达到预设值后发出信号,控制模块接收信号控制第二电磁铁73断电,使得第二电磁铁73停止移动,防止刮刀72一直往外侧移动,导致损坏设备,刮干净后,手动将刮刀72复位,刮刀72带动第二电磁铁73和距离传感器74复位,如此,医生在观察x片时,不会受灰尘的影响,避免观察失误。
40.还包括有角度调整机构8,角度调整机构8包括有第四连杆81、机构外箱82、第五连杆83、齿条杆84、驱动电机85、第一齿轮86、导向槽87和转杆88,底座1顶部中间设有三个第四连杆81,第四连杆81为竖向设置,第四连杆81上部之间滑动式设有机构外箱82,机构外箱82顶部与第一连杆41上部之间设有第五连杆83,机构外箱82内部滑动式设有齿条杆84,机
构外箱82内部设有驱动电机85,驱动电机85位于齿条杆84右后侧,驱动电机85输出轴与机构外箱82转动式连接,驱动电机85输出轴上设有第一齿轮86,透光板55下侧设有导向槽87,导向槽87内部滑动式设有转杆88,转杆88左侧与齿条杆84右侧连接。
41.距离传感器74达到预设值后发出信号,控制模块接收信号控制驱动电机85启动,驱动电机85输出轴带动第一齿轮86转动,进而带动齿条杆84往右移动,齿条杆84带动转杆88往右移动,进而带动导向槽87转动,导向槽87带动透光板55转动,如此,便可对透光板55的角度进行调节,方便医生对x片进行观察,转动到医生所需的角度后,短按触发开关57,触发开关57发出信号,控制模块接收信号控制驱动电机85停止,观察完毕,长按触发开关57三秒,触发开关57发出信号,控制模块接收信号控制驱动电机85反转,驱动电机85输出轴带动第一齿轮86反转,进而带动齿条杆84往左移动复位,齿条杆84带动转杆88往左移动,进而带动到导向槽87和透光板55及以上部件复位,短按触发开关57,触发开关57发出信号,控制模块接收信号控制驱动电机85停止。
42.还包括有光线调整机构9,光线调整机构9包括有u型连接板91、转轴92、第二齿轮93、第三齿轮94、灯罩95和led灯96,机构外箱82内部右上侧设有u型连接板91,u型连接板91下侧转动式连接有两个转轴92,下侧的转轴92中部设有第二齿轮93,第二齿轮93与第一齿轮86啮合,转轴92前侧均设有第三齿轮94,两个第三齿轮94相互啮合,上侧的转轴92中部设有灯罩95,灯罩95内部设有led灯96。
43.本设备上电之后,led灯96自动亮起,如此,便无需借助手电筒,当第一齿轮86转动时,带动第二齿轮93转动,进而带动下侧的转轴92转动,下侧的转轴92转动带动第三齿轮94转动,第三齿轮94转动带动上侧的转轴92转动,进而带动灯罩95转动,灯罩95转动带动led灯96转动,使得led灯96的光源可以随着透光板55的转动进行调节,使得光源处于透光板55的中部,当第一齿轮86反转时,带动第二齿轮93、转轴92和第三齿轮94反转,进而带动灯罩95和led灯96反转,观察完毕,关闭电源总开关,led灯96关闭。
44.还包括有控制箱3,底座1顶部右侧中间设有控制箱3,控制箱3包括有开关电源、电源模块和控制模块,开关电源为整个设备供电,开关电源输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;触发开关57和距离传感器74都与控制模块通过电性连接,第一电动推杆42、第二电动推杆56、第一电磁铁66、第二电磁铁73和led灯96都与控制模块通过继电器控制模块连接,驱动电机85与控制模块通过直流电机正反转模块连接。
45.本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1