一种基于无惯性反馈校正的光束稳定装置
1.本发明属于超精密光学成像与刻写领域,尤其涉及一种基于无惯性反馈校正的光束稳定装置。
背景技术:
2.随着激光设备应用领域不断拓展及要求的不断提高,其对光源系统的性能指标也在不断加强,然而激光器由于其本身原理、结构和外部环境等因素影响,本身很难避免光束漂移问题。除光源本身产生光束时存在的漂移外,后续光路中的器件也会因自身结构特性和环境变化对光束传导的稳定性产生影响,如机械结构件受温度和外力产生应变、系统空腔内气流密度变化、电磁干扰等都会使光束偏离理想传导路径,最终获得的光斑将受到上述各种因素的叠加影响,在位置上产生平移,在角度上产生偏转。通常精密光学系统都会放置于封闭受控的恒温恒湿环境中,使用隔振平台被动减震,并配备空气滤清系统,一定程度上可以避免环境对系统内光路稳定性的影响。然而,随着精密光学系统的精度要求不断提高,高规格的环境控制系统成本也难以控制,通过环境控制等被动手段控制之后残余的光束漂移量已经无法忽视,光学系统的光束漂移需要引入更加有效的手段加以控制。
3.通常,光束的漂移量最终可以等效为位置与角度的偏移,在位置上光束存在平行于理想轴线的平移,在角度上与理想轴线形成夹角。光学系统中光束漂移现象可视为一个随机实时的过程,使用光束稳定装置,可利用监测反馈的主动控制手段,实时校正光束指向,将无法通过被动手段控制的光束漂移量最大程度消除,使光学系统达到预定的精度要求。
4.目前光束稳定装置已广泛运用于激光通信、光测量、激光加工等多个领域,其基本组成部分包括执行器件、控制器、及光束监测部分,现有的光束稳定装置通过各种光路构型及控制算法优化已经取得了较好的稳定控制性能。然而,随着精密光学系统性能指标的不断提高,目前的光束稳定装置仍然存在一定短板,主要表现在执行器件本身性能造成的光束稳定性能限制,目前的光束稳定装置中执行器件主要为机械装置驱动的快速反射镜,驱动装置通常为音圈电机驱动器或压电陶瓷驱动器,两者结构上以及反射镜本身都具有一定惯性,导致执行时响应时间过长,控制频率受到限制。
技术实现要素:
5.本发明的目的在于针对现有技术的不足,提供一种基于无惯性反馈校正的光束稳定装置。
6.本发明通过以下技术方案来实现:一种基于无惯性反馈校正的光束稳定装置,包括两对光束偏转器、第一分光棱镜、第二分光棱镜、第一透镜、第二透镜、第一光电感应器、第二光电感应器和控制器;其中,每对光束偏转器包括垂直放置的x轴光束偏转器与y轴光束偏转器,分别用于沿入射光束x与y方向对光束进行角度偏转,经两对光束偏转器偏转后的入射光束经过所述第一分光棱镜分
光为出射光束与第一反射光束,第一反射光束经过所述第二分光棱镜分束后分为第一监控光束与第二监控光束;第一监控光束经过所述第一透镜后到达所述第一光电感应器,第二监控光束经过所述第二透镜到达第二光电感应器;入射光束到达第二对光束偏转器的入射位置与所述第一光电感应器的探测面关于所述第一透镜为物像关系;第二光电感应器探测面放置于第二透镜的焦面处。第一光电感应器和第二光电感应器分别对光束位置、角度进行独立监测并发送至控制器,控制器根据监测信息控制两对光束偏转器偏转校正入射光束的光路。
7.进一步地,两对光束偏转器中,两个x轴光束偏转器平行反向放置,两个y轴光束偏转器平行反向放置。
8.进一步地,所述光束偏转器为声光偏转器或电光偏转器。
9.进一步地,所述控制器根据监测信息控制两对光束偏转器偏转校正入射光束的光路时,保持入射光束通过第一对光束偏转器后,到达第二对光束偏转器的入射位置不变。
10.进一步地,所述第一光电感应器与所述第二光电感应器为位置探测器或四象限探测器。
11.进一步地,还包括第二反射镜,用于将第一监控光束或第二监控光束方向调整为与入射光束光路平行。
12.进一步地,还包括第三透镜;所述第三透镜与第二透镜组成透镜组。
13.进一步地,所述第一分光棱镜较高的透射反射比,将主光束大部分能量透射后从该光束稳定装置后端出射,剩余小部分能量反射进入监测光路。所述第二分光棱镜透射反射比相等,将第一反射光束等分为第一监控光束与第二监控光束。
14.本发明的有益效果是:本发明提供了一种基于角度无惯性反馈校正的光束稳定装置,利用无惯性反馈的光束偏转器同时实现对光束角度和位置的修正,相对于传统的光束稳定装置去除了所有机械式执行器件,提高了系统的光束漂移修正精度,并且能够凭借光束偏转器的高控制频率,大幅减小修正周期,实现光束角度和位置的快速修正。
附图说明
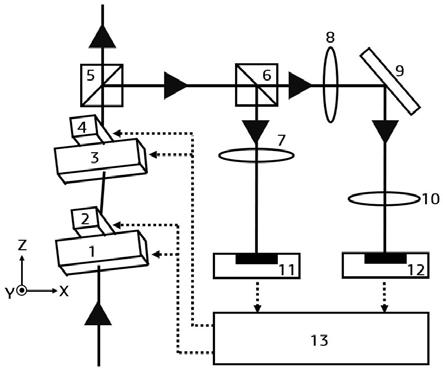
15.图1是本发明基于角度无惯性反馈校正的光束稳定装置示意图;图2是本发明位置漂移的检测与实时修正光路设计图;图3是本发明角度漂移的检测与实时修正光路设计图;图4是本发明中利用光束偏转器修正光路位置原理图;图5是本发明中利用光束偏转器修正光路角度原理图。
16.图中,1-x轴第一光束偏转器、2
‑ꢀ
y轴第一光束偏转器、3
‑ꢀ
x轴第二光束偏转器、4
‑ꢀ
y轴第二光束偏转器、5-第一分光棱镜、6-第二分光棱镜、7-第一透镜、8-第二透镜、9-第二反射镜、10-第三透镜、11-第一光电感应器、12-第二光电感应器、13-控制器。
具体实施方式
17.下面通过实施例和附图对本发明作进一步说明,但不应以此限制本发明的保护范围。
18.本发明提供一种基于无惯性反馈校正的光束稳定装置,包括两对光束偏转器、第
一分光棱镜5、第二分光棱镜6、第一透镜7、第二透镜8、第一光电感应器11、第二光电感应器12和控制器13等;其中,每对光束偏转器包括垂直放置的x轴光束偏转器与y轴光束偏转器,分别用于沿入射光束x与y方向对光束进行角度偏转,经两对光束偏转器偏转后的入射光束经过所述第一分光棱镜5将分光为出射光束与第一反射光束,第一反射光束经过所述第二分光棱镜6分束后分为第一监控光束与第二监控光束;第一监控光束经过所述第一透镜7后到达所述第一光电感应器11,第二监控光束经过所述第二透镜8到达第二光电感应器12;入射光束到达第二对光束偏转器的入射位置与所述第一光电感应器11的探测面关于所述第一透镜7为物像关系;第二光电感应器12探测面放置于第二透镜8的焦面处。第一光电感应器11和第二光电感应器12分别对光束位置、角度进行独立监测并发送至控制器13,控制器13根据监测信息控制两对光束偏转器偏转校正入射光束的光路。
19.作为一优选方案,如图1所示,两对光束偏转器包括组成第一对光束偏转器的x轴第一光束偏转器1、y轴第一光束偏转器2和组成第二对光束偏转器的x轴第二光束偏转器3、y轴第二光束偏转器4,其中,x轴第一光束偏转器1与x轴第二光束偏转器3平行反向放置、y轴第一光束偏转器2与y轴第二光束偏转器4平行反向放置分别用于沿入射光束x与y方向对光束进行两次角度偏转,实现x轴和y轴位置和角度控制。
20.进一步地,还包括第二反射镜9,用于将第一监控光束或第二监控光束方向调整为与入射光束光路平行,以减小装置的体积。
21.进一步地,还包括第三透镜10;所述第三透镜10与第二透镜8组成一个可等效为一长焦透镜的透镜组,便于缩短光程及调试时寻找焦点。图1所示为一优选方案的具体装置结构图,下面结合图1所示装置进一步说明本发明对入射光束进行实时稳定的方法,具体如下:一束波长为532nm的入射光束,进入光束稳定装置后,透射经过两对垂直放置的光束偏转器(x轴第一光束偏转器1、y轴第一光束偏转器2、x轴第二光束偏转器3、y轴第二光束偏转器4),可选用英国gooch&housego公司型号为4090-7的声光偏转器,其扫描角度约为44mrad,布拉格角度为1.76
°
,每个光束偏转器能够对光束在光束偏转器布拉格角度附近一定范围内实现任意偏转,角度偏转根据光束偏转器摆放方向在一个固定平面上进行。在本发明中,可对光束实现两次x、y方向的偏转。
22.从两对光束偏转器出射后的光束经过第一分光棱镜5以后出射,该分光棱镜具有9:1的透射反射比,因此主光束90%能量透射后从该光束稳定装置后端出射,剩余10%能量反射进入监测光路。反射光束经过透射反射比1:1的第二分光棱镜6分束后,等分为第一监控光束与第二监控光束,第一监控光束经过第一透镜7后投射到第一光电感应器11的探测面上,光电感应器处理信号后将位置信息发送至控制器13,系统通过检测焦点实时的位移获得光束位置角度偏转情况。图2为位置漂移的检测与实时修正光路设计图,其中d0=30mm为第二对光束偏转器入射点到第一分光棱镜5中心距离, d1=40mm为第一分光棱镜5中心到第二分光棱镜6中心距离,d2=30mm为第二分光棱镜6中心到第一透镜7中心的距离,d3=100mm为第一透镜7中心到第一光电感应器11的探测面的距离,第一透镜7的焦距为f1=50mm,以上各距离数值满足下关系式(1):
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)根据以上关系式,入射光束到达第二对光束偏转器的入射位置与所述第一光电感应器11的探测面关于所述第一透镜7为物像关系,当两对光束偏转器前后配合小范围调整入射光束角度时,通过控制器计算选取各自的偏转角度,使光束在改变角度后仍然经过第一分光棱镜5中心,由于上述物象关系,物点处光斑位置不变,在第一光电感应器11上的光斑位置也不变;两对光束偏转器进行位置修正时,由于物象关系存在,第一光电感应器11上的光斑位置将会相应改变。因此第一光电感应器11可以实现对光束位置的独立监测,同时不会被角度修正所干扰。
23.第二监控光束经过第二透镜8、第一反射镜9与第三透镜10后入射到第二光电感应器12的探测面上,系统通过检测焦点实时的位移计算获得角度偏转情况。图3为角度漂移的检测与实时修正光路设计图,其中d4=60mm为第二透镜8到第一反射镜9中心的距离,d5=28mm为第一反射镜9中心到第三透镜10的距离,d6为第三透镜10到第二光电感应器12探测面的距离,第二透镜8选取索雷博型号为lbf254-100-a的透镜,焦距f2=100mm,第三透镜10选取索雷博型号为ld2060的透镜,焦距f3=-15mm,组合后透镜组的等效焦距f可根据关系式(2)计算获得:
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)第三透镜10到第二光电感应器12探测面的距离d6可根据关系式(3)计算获得:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)根据以上换算结果,将第二光电感应器12探测面放置于由第二透镜8与第三透镜10组成透镜组的焦面处,此时当光束只存在位置变化时,焦面处的光斑位置不变,当光束角度存在变化时,焦面处的光斑将相应会移动,通过计算可获得光束角度的变化量。因此第二光电感应器12可以实现对光束角度的独立监测,同时不会被位置修正所干扰。
24.通过两个光电感应器独立监测光束位置及角度,将信息传递至控制器13,由控制器计算角度位置信息,并计算修正量,将驱动信号反馈至光束偏转器,实现对光束位置及角度的实时修正。具体地,控制器13通过控制4个光束偏转器频率,分别精确控制光束在x方向与y方向的偏转角度。其中同平面放置即调整同一轴的前后两个光束偏转器(x轴第一光束偏转器1、x轴第二光束偏转器3为同一平面放置,y轴第一光束偏转器2、y轴第二光束偏转器4)为同一平面放置)通过各自角度设定上的配合,可实现光束在该平面上的位置及角度控制。如图4为前后两个放置于同一平面上的光束偏转器配合实现对光束的位置控制示意图,其中光束偏转器放置的方向相反(即偏转方向相反),在前为光束偏转器a,在后为光束偏转器b;当入射光束从l1位置偏移到l2位置时,需要将光束出射角度和位置修正至l1光路的出射角度和位置。在此过程中光束偏转器a入射角不变,增大光束偏转器a输入频率增大其出射角,将光束在光束偏转器b的入射点恢复到l1光路与光束偏转器b的入射交点上,此时光束偏转器b入射角增大,即需要减小光束偏转器b输入频率,减小其出射角使其恢复至调整
前大小,此时光束从l2位置入射时,出射仍然保持l1光路的出射角度和位置。如图5为前后两个放置于同一平面上的光束偏转器配合实现对光束的角度控制示意图,其中光束偏转器放置的方向相反(即偏转方向相反),当入射光束从l1角度偏转到l2角度时,需要将光束出射角度和位置修正至l1光路的出射角度和位置。在此过程中光束偏转器a入射角变大,由于光束偏转器a、b的间距通常小于光束偏转起始点与光束偏转器a的距离,因此需要增大光束偏转器a的输入频率增大其出射角,将光束在光束偏转器b的入射点恢复到l1光路与光束偏转器b的入射交点上,此时光束偏转器b入射角增大,调整光束偏转器b输入频率,减小其出射角将出射光出射光角度修正回到l1光路的出射角度,此时光束从l2角度入射时,出射仍然保持l1光路的出射角度和位置。以上角度和位置修正方向反之亦然。本发明中,x轴第一光束偏转器1与x轴第二光束偏转器2配合实现光束x方向上的位置和角度修正,y轴第一光束偏转器3与y轴第二光束偏转器4配合实现光束y方向上的位置和角度修正。
25.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其他不同形式的变化或变动。这里无需也无法把所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1