平视显示器、影像校正方法以及影像校正程序与流程
1.本发明涉及影像校正装置,尤其涉及搭载于车辆的平视显示器、影像校正方法以及其程序。
背景技术:
2.近年来,在汽车等移动体中,公知有通过在驾驶员的视觉辨认区域的实像上重叠地显示数字影像的虚像来辅助驾驶员的平视显示器等的技术。
3.例如,在专利文献1中公开一种平视显示装置,通过将表示显示器所显示的显示图像的显示光照射到本车辆的挡风玻璃,从而使用户与本车辆前方的实景重叠地视觉辨认显示图像的虚像。另外,在专利文献1中公开如下的技术,在本车辆振动时,根据振动信息确定伴随着振动的本车辆的位移量的竖直分量而读出显示位置校正量,使基于该显示位置校正量而描绘的图像的显示位置向上下方向中的与本车辆位移的方向相反的方向移动。由此,能够降低由于本车辆振动时的虚像的偏移而给用户带来的显示的不协调感。
4.专利文献1:日本特开2017-13590号公报。
5.然而,若与逐次变化的车辆的振动对应地进行使虚像的显示位置移动的校正,例如,进行校正处理的半导体装置的负荷变大,有可能导致处理速度的降低。另外,为了防止该处理速度的降低,需要搭载大规模的半导体装置,还需要装置的大型化、装置的发热对策。
技术实现要素:
6.本发明是鉴于上述的点而完成的,其目的在于,提供平视显示器、影像校正方法以及影像校正程序,通过简单的结构和处理来降低车辆振动时的虚像的偏移导致的驾驶员感到的不协调感。
7.本发明的平视显示器搭载于移动体,其特征在于,包含:图像取得部,其取得包含图形的图像;振动信息取得部,其取得表示施加给上述移动体的振动的振动信息;图像校正部,其基于上述振动信息,对上述图像实施模糊校正来生成校正图像,上述模糊校正是对上述图像内的上述图形的轮廓实施模糊化;以及显示部,其将上述校正图像在空间中显示为虚像。
8.另外,在本发明的平视显示器的影像校正方法中,该平视显示器搭载于移动体并包含显示部,该显示部将上述校正图像在空间中显示为虚像,其特征在于,该平视显示器的影像校正方法包含如下的步骤:图像取得步骤,取得包含图形的图像;振动信息取得步骤,取得表示施加给上述移动体的振动的振动信息;以及图像校正步骤,基于上述振动信息,对上述图像实施模糊校正来生成上述校正图像,上述模糊校正是对上述图像内的上述图形的轮廓实施模糊化。
9.另外,在本发明的影像校正程序中,平视显示器搭载于移动体并包含显示部,显示部将上述校正图像在空间中显示为虚像,其特征在于,该影像校正程序使搭载于该平视显
示器的计算机执行如下的步骤:图像取得步骤,取得包含图形的图像;振动信息取得步骤,取得表示施加给上述移动体的振动的振动信息;以及图像校正步骤,基于上述振动信息,对上述图像实施模糊校正来生成上述校正图像,上述模糊校正是对上述图像内的上述图形的轮廓实施模糊化。
附图说明
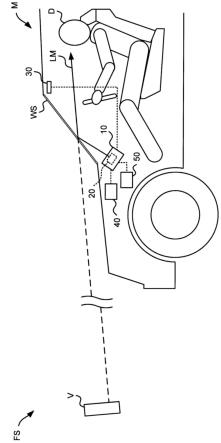
10.图1是表示作为搭载了本技术的实施例1的hud的车辆的汽车的车室前座部分的侧面的图。
11.图2是表示本技术的实施例1的hud的结构的框图。
12.图3是表示实施本技术的实施例1的hud的校正处理前的图形的一例的图。
13.图4是表示图3的图形的a-a线处的实施校正处理前后的亮度和彩度的强度分布的图表。
14.图5是表示将实施本技术的实施例1的hud的校正处理前后的图形作为虚像显示时的外观的一例的图。
15.图6是表示本技术的实施例1的hud的振动传感器检测出的振动以及将该振动分离为水平方向的振动和垂直方向的振动时的振动方向的图。
16.图7是表示作为本技术的实施例1的hud的动作程序的一例的虚像显示程序的图。
17.图8是表示实施例2的hud在图3的图形的a-a线处实施校正处理前后的亮度和彩度的强度分布的图表。
18.图9是表示实施例2的hud在图3的图形的a-a线处实施校正处理前后的亮度和彩度的强度分布的图表。
19.图10是表示作为本技术的实施例2的hud的动作程序的一例的虚像显示程序的图。
20.图11是表示本发明的hud所投影的虚像的显示例的图。
21.图12是表示图11所示的表示白线标记的虚像各自的垂直方向的亮度和彩度的强度分布的图。
22.附图标记的说明
23.10
…
hud;20
…
投光部;30
…
车载照相机;40
…
gps接收机;50
…
振动传感器;103
…
存储部;105
…
控制部;107
…
输入部;109
…
输出部。
具体实施方式
24.以下,一边参照附图一边详细地说明本发明的实施例。此外,在以下的各实施例的说明和附图中,对实质上相同或者等价的部分标注相同的参照附图标记。
25.[实施例1]
[0026]
以下,参照附图对作为第一实施方式的本技术的实施例1的平视显示器(以下,称为hud)10进行说明。在实施例1中,以将hud10搭载于汽车m时为例进行说明。
[0027]
图1是表示作为搭载了本技术的实施例1的hud10的车辆的汽车m的车室前座部分的侧面的图。在图1中,作为安装例,示出在汽车m的仪表板部分安装有hud10这一情形。即,hud10是搭载于作为移动体的汽车m的平视显示器。
[0028]
hud10包含作为显示部的投光部20。投光部20与hud10可通信地连接,例如,通过基
于hud10的控制将显示光lm投射到挡风玻璃ws,能够使驾驶员d在对象空间fs中视觉辨认该影像为虚像v。此外,投光部20也可以是使用了mems(micro electro mechanical systems:微机电系统)反射镜的digital light processing(数字光处理)(dlp)或者激光扫描这样的光投射方式。即,投光部20只要将作为虚像v显示的图像作为显示光lm投射到挡风玻璃ws,通过由该挡风玻璃ws反射的显示光lm使驾驶员d视觉辨认虚像v即可。
[0029]
此外,投光部20也可以不是使显示光lm投射到挡风玻璃ws的结构,例如,是能够显示影像的液晶显示器、有机el显示器等显示器这样的显示装置。
[0030]
车载照相机30例如是能够拍摄汽车m的前方(对象空间fs)的照相机。车载照相机30例如设置于车内反射镜、或者设置于挡风玻璃ws的上端或者该上端附近的顶棚部。另外,车载照相机30与hud10可通信地连接,能够将拍摄到的影像的信号发送给hud10。此外,hud10只要配设于至少生成虚像v的空间、即能够拍摄汽车m的前方的位置即可。车载照相机30例如也可以设置于汽车m的前格栅部或者侧反射镜中的各个并取向为能够拍摄对象空间fs。
[0031]
gps接收机40是接收来自gps(global positioning system:全球定位系统)卫星的信号(gps信号)的装置。gps接收机40例如配设在仪表板上。此外,gps接收机40只要能够接收gps信号则也可以配设于任意位置。gps接收机40与hud10可通信地连接,能够将接收到的gps信号发送给hud10。另外,hud10具有与gps接收机40联动地进行朝向所设定的目的地的路径探索和路径指示的导航功能。
[0032]
hud10例如根据由车载照相机30取得的对象空间fs的影像来检测表示汽车m当前行驶的车道的白线、中央分离带的信息、在前方行驶的其他车辆的信息或者在汽车m的前方步行的行人的信息等。另外,hud10使表示这些信息的虚像v与由驾驶员d视觉辨认的对象空间fs的实像重叠地显示,使驾驶员d视觉辨认该虚像v。
[0033]
由hud10显示为虚像v的图像例如是包含表示增强白线的白线标记、增强前方的其他车辆的其他车辆标记以及与前方的其他车辆的车间距离、以及增强在汽车m的前方步行的行人的行人标记等的图形的图像。另外,由hud10显示为虚像v的图像例如是包含由导航功能指示的引导、即表示在行进方向的交叉点处的前进、右转或左转等的路径指示箭头标记等或者到目的地为止的距离、到达预估时刻等图形的图像。
[0034]
作为振动信息取得部的振动传感器50为检测汽车m的驾驶中的振动信息的传感器。振动传感器50例如包含加速度传感器或者陀螺传感器等,检测包含汽车m的驾驶中的汽车m的振动方向、振动量和振动频率的振动信息。汽车m的振动信息例如是具有包含垂直方向的振动的振幅和频率的垂直振动信息、以及包含水平方向的振动的振幅和频率的水平振动信息的信息。其中,这里所说的垂直方向例如是沿着重力方向的方向、即竖直方向。另外,水平方向例如是沿着与竖直方向正交的方向的方向。
[0035]
振动传感器50与hud10可通信地连接,能够向hud10发送检测出的振动信息。此外,振动传感器50也可以配设于hud10的壳体内。作为hud10显示的虚像v晃动的重要因素,由于汽车m的振动而使投光部20振动,由于显示光lm的挡风玻璃ws的投射位置晃动而产生虚像v的晃动。通过将振动传感器50配设在投光部20的附近,振动传感器50能够取得接近施加给投光部20的振动的振动信息。换言之,hud10包含作为振动信息取得部的振动传感器50,该振动信息取得部取得表示施加给汽车m的振动的振动信息。另外,振动信息包含与施加给汽
车m的水平方向的振动相关的水平振动信息以及与垂直方向的振动相关的垂直振动信息。
[0036]
hud10根据从振动传感器50接收到的振动信息,对作为虚像v显示的图像实施后述的校正。由此,在由驾驶员d视觉辨认的前方的实像与虚像v因汽车m的振动而产生晃动的情况下,hud10也能够视觉上减轻该晃动,能够减轻驾驶员d感到的不协调感。
[0037]
图2是表示本技术的实施例1的hud10的结构的框图。hud10例如是经由系统总线101而使存储部103、控制部105、输入部107、输出部109协作的装置。另外,在hud10的控制部105连接有mcu(micro controller unit:微控制器单元)70。
[0038]
mcu70是控制hud10的整体的控制部。mcu70的控制内容例如包含hud10的动作的开始和停止、hud10的控制部105进行处理的动作定时等。
[0039]
存储部103例如由硬盘装置、ssd(solid state drive:固态硬盘)、闪存等构成,存储操作系统和终端用的软件等各种程序。另外,存储部103存储包含作为虚像v显示的图形的图像以及用于导航功能的地图信息。此外,各种程序、图像和地图信息例如也可以从其他的服务器装置等经由网络取得,也可以记录于记录介质并经由各种驱动装置读入。即,存储于存储部103的各种程序(包含用于执行后述的hud10中的处理的程序)能够经由网络传送,另外,能够记录于计算机可读取的记录介质进行转让。
[0040]
控制部105由cpu(central processing unit:中央处理单元)105a、rom(read only memory:只读存储器)105b、ram(random access memory:随机存取存储器)105c等构成,作为计算机发挥功能。而且,cpu105a通过读出并执行存储于rom105b、存储部103的各种程序而实现各种功能。
[0041]
输入部107是将hud10与车载照相机30、gps接收机40和振动传感器50可通信地连接的接口部。hud10能够经由输入部107从车载照相机30接收汽车m的前方图像,从gps接收机40接收汽车m的当前位置信息,从振动传感器50接收汽车m的振动信息。此外,在本实施例1中,说明由车载照相机30拍摄的影像直接输入到hud10的情况。在该情况下,控制部105的cpu105a根据从车载照相机30发送的影像信号的信息生成影像数据,针对ram105c依次写入或者读出包含该影像数据的数据块。然而,hud10也可以在车载照相机30与输入部107之间具备图形生成部,该图形生成部根据从车载照相机30发送的影像信号的信息生成影像数据。在该情况下,hud10从图形生成部依次接收影像数据,将包含该影像数据的数据块写入ram105c,另外,依次读出该写入的数据块。由此,能够抑制hud10的控制部105的负荷。
[0042]
输出部109与投光部20可通信地连接,通过向投光部20发送作为虚像v显示的图像的信号并投射显示光lm,能够在对象空间fs显示虚像v。
[0043]
另外,控制部105从存储部103读出包含作为虚像v显示的上述的白线标记、其他车辆标记、与其他车辆的车间距离、行人标记或者路径指示箭头标记等图形的图像。此时,控制部105作为图像取得部发挥功能。
[0044]
另外,控制部105根据所读出的图像生成由投光部20显示为虚像v的校正图像,经由输出部109向投光部20送出该校正图像的信号。投光部20使接收到的校正图像的信号作为显示光lm投射到挡风玻璃ws而作为虚像v使驾驶员d视觉辨认。
[0045]
控制部105在生成校正图像时,基于从振动传感器50接收到的振动信息而对从存储部103读出的图像内的图形实施校正处理从而生成校正图像。具体而言,控制部105根据从振动传感器50接收到的振动信息,以根据垂直方向和水平方向的振动量,对图像所包含
的图形的轮廓实施模糊化的方式生成实施了校正的校正图像,。此时,控制部105作为hud10的图像校正部发挥功能。
[0046]
接下来,使用图3和图4对本技术的实施例1的hud10的校正处理进行说明。
[0047]
图3是表示实施本技术的实施例1的hud10的校正处理之前的图形im的一例的图。在本实施例中,如图3所示,说明对长方形的图形im进行校正的情况。另外,在本实施例中,说明对图3的垂直方向(沿着a-a线的方向)的振动实施校正的情况。
[0048]
另外,图4是表示图3的图形im的a-a线处的实施校正处理前后的亮度和彩度的强度分布的图表。图4的纵轴相当于a-a线,横轴表示作为虚像v显示的情况下的亮度和彩度的强度。另外,图4的左侧表示实施校正处理前的图形im中的亮度和彩度的强度分布,右侧表示实施校正处理后的校正图像中的亮度和彩度的强度分布。
[0049]
例如如图4的左侧所示,在由轮廓eg划分出的显示区域内,实施校正处理前的图形im的a-a线处的亮度分布通过一样的亮度显示。即,在实施校正处理前的图形im中,显示区域内的亮度和彩度的强度一致为100%,显示区域外的亮度和彩度的强度一致为0%。
[0050]
若像这样轮廓eg清晰的图形im作为虚像v投射,则根据汽车m的振动的频率而断续地显示轮廓eg的晃动(振动)。因此,在校正处理前的图形im作为虚像v显示时,在虚像v中例如所显示的图形的线宽度看起来较粗、或者在轮廓eg周边产生闪烁。由此,虚像v成为与图形im不同的形状而由驾驶员d识别,使驾驶员d产生不协调感。
[0051]
即,在显示使驾驶员d产生不协调感的虚像v的情况下,虚像v的可视性降低,驾驶员d有可能为了视觉辨认虚像v而注视、或者无法识别虚像v所表示的信息,有可能影响驾驶的安全性。
[0052]
在本技术的实施例1的hud10中,如图4的右侧所示,在由轮廓eg划分出的显示区域内的轮廓eg周缘部,形成模糊校正区域ca。控制部105进行校正,使得在从模糊校正区域ca的显示区域内的校正开始点cs到显示区域外的校正结束点ce的范围内,使图形im的亮度和彩度阶段性地减少。即,控制部105对图形im实施使轮廓eg周边的亮度和彩度阶段性地减少而对轮廓eg实施模糊化的处理,生成校正图像。
[0053]
此外,此时减少的亮度和彩度例如是ycbcr系颜色空间。具体而言,控制部105在模糊校正区域ca中,在从校正开始点cs到校正结束点ce的范围内使亮度(y)阶段性地从图形im保有的值减少到y=0。另外,与此同时,控制部105实施校正处理,使得彩度(cbcr)在cbcr颜色平面上从图形im保有的值直线性地移动到原点(cb=0,cr=0)。即,在显示有实施了校正处理的图形im的虚像v中,该虚像v的轮廓eg周边从显示区域朝向外侧,明亮度逐渐降低,并且颜色逐渐变淡。
[0054]
另外,控制部105将校正开始点cs的位置例如从图形im的轮廓eg起以与沿着图形的校正方向的宽度的振动的振幅对应的规定的比例设置在轮廓eg的内侧。即,振动的振幅越大则校正开始点cs被设置为越位于图形im的内侧。此外,校正开始点cs的位置能够任意设定。例如,控制部105也可以将校正开始点cs的位置从轮廓eg向内侧设置在相当于振动的振幅的1/2的量的距离的位置。另外,控制部105也可以将校正开始点cs的位置从轮廓eg向内侧设置在振动的振幅的规定的比例的距离的位置。校正开始点cs的位置只要设定为使校正处理后的虚像v的可视性良好即可。
[0055]
另外,控制部105使校正结束点ce的位置例如与校正开始点cs的位置同样地,以与
沿着图形im的校正方向的宽度的振动的振幅对应的规定的比例从轮廓eg向外侧设置。即,振动的振幅越大则校正结束点ce设置为越位于图形im的内侧。此外,校正结束点ce的位置能够任意设定。例如,控制部105也可以将校正结束点ce从图形im的轮廓eg向外侧设置在相当于振动振幅的1/2的量的距离的位置,控制部105也可以将校正开始点cs的位置从轮廓eg向外侧设置在振动的振幅的规定的比例的距离的位置。另外,例如,控制部105也可以根据图形的形状和显示位置来将校正结束点ce的位置调整为不与其他图形的显示区域重复,只要设定为校正处理后的虚像v的可视性良好即可。
[0056]
另外,在本实施例1中,在模糊校正区域ca中在使亮度和彩度急剧地减少的区间与使亮度和彩度缓慢地减少的区间这2个阶段使亮度和彩度减少。由此,能够使校正处理后的虚像v的可视性良好。此外,亮度和彩度的减少方法不限于此。关于亮度和彩度的减少,也可以在从校正开始点cs到校正结束点ce的范围内直线性地减少,也可以分割成多段而减少。另外,关于亮度和彩度的减少,也可以在从校正开始点cs到校正结束点ce的范围内曲线性地减少。
[0057]
另外,在本实施例中,说明了与振动的振幅对应地使校正区域ca的范围变化的情况。然而,校正区域ca的范围也可以与振动的频率对应地变化。例如,在振动的频率较低,控制部105判定为不影响驾驶员d的可视性的情况下,也可以减小校正区域ca的范围或者不进行校正。
[0058]
图5是表示将实施校正处理前后的图形im作为虚像v显示时的外观的一例的图。图5与图3同样,说明对沿着a-a线的方向的振动实施校正的情况。图5的左侧表示将实施校正处理前的图形im作为虚像v显示的情况下的外观,图5的右侧表示将实施校正处理后的图形im作为虚像v显示的情况下的外观。此外,在图5的右侧,表示为规定的外观的区域呈阶梯状显示,但实际上在从校正开始点cs到校正结束点ce的范围内,亮度和彩度逐渐减少而显示为带有渐变。
[0059]
在将图5的左侧的实施校正处理前的图形im作为虚像v显示的情况下的外观中,如上述那样在轮廓eg的外侧的区域,显示由于汽车m的振动而清晰的轮廓eg的晃动。另外,该晃动显示为汽车m的振动的频率对应的闪烁。因此,如图5的左侧所示,在将实施校正处理前的图形im作为虚像v显示的情况下的外观中,图形im的可视性变差。
[0060]
图5的右侧的实施校正处理后的图形im像上述那样,实施使轮廓eg的周边的亮度和彩度阶段性地降低而模糊的校正处理。因此,在将实施校正处理后的图形im作为虚像v显示的情况下的外观中,在汽车m振动的状态下也是在从轮廓eg的内侧的模糊校正区域ca的校正开始点cs到轮廓eg的外侧范围内显示为带有渐变。即,如图5的左侧所示,不显示轮廓eg的清晰的晃动,显示为轮廓eg的晃动的外端不容易判别。因此,如图5的右侧所示,图形im的可视性非常高。即,能够减轻由于汽车m的振动引起的虚像v的晃动。
[0061]
在本实施例1中,针对包含作为虚像v显示的图形的图像,实施与汽车m的振动对应地使图形的轮廓部周边的亮度和彩度阶段性地减少并使该轮廓模糊这样的校正。由此,能够减轻由于汽车m的振动引起的虚像v的晃动而导致的可视性的降低,能够减轻驾驶员d感到的不协调感。
[0062]
此外,在本实施例1的图3至图5中,说明了仅对垂直方向的振动实施校正的例子。然而,如上所述,实际上针对水平方向的振动也实施同样的校正处理。
[0063]
图6是表示由振动传感器50检测出的振动rm、以及将该振动rm分离为水平方向的振动rx和垂直方向的振动ry时的振动方向的图。
[0064]
通过振动传感器50所包含的加速度传感器和陀螺传感器等,例如如图6所示,能够将具有倾斜的振动rm分离为水平方向的振动rx和垂直方向的振动ry。控制部105针对从存储部103读出的图像的图形的轮廓,实施与水平方向的振动rx的振动量对应的水平方向的模糊校正处理,并且实施与垂直方向的振动ry的振动量对应的垂直方向的模糊校正处理。即,在水平方向的振动中也能够提高虚像v的图形的可视性。由此,例如,在汽车m的转弯时汽车m倾斜时的振动、由横风等引起的振动等产生的情况下,能够减轻由于虚像v的晃动引起的可视性的降低而减轻驾驶员d感到的不协调感。
[0065]
此外,在本实施例1中,说明了在将图形im的轮廓eg模糊的校正中,使作为虚像v显示时的亮度和彩度阶段性地减少而进行校正的情况。然而,在将轮廓eg模糊的校正中,也可以进行仅使亮度变化的校正。即,通过在模糊校正区域ca中使亮度阶段性地降低,也能够将图形im的轮廓eg模糊。由此,能够减轻由于汽车m的振动引起的虚像v的晃动所产生的可视性的降低,能够减轻驾驶员d感到的不协调感。
[0066]
以下,说明hud10的直到显示虚像v为止的动作程序的一例。
[0067]
图7是表示作为本技术的实施例1的hud10的动作程序的一例的虚像显示程序r1的图。例如在hud10的电源接通时反复执行虚像显示程序r1。
[0068]
若开始虚像显示程序r1,则控制部105从车载照相机30取得作为显示由该车载照相机30拍摄的虚像v的对象空间fs的汽车m的前方图像(步骤s101)。
[0069]
接下来,控制部105根据所取得的汽车m的前方图像判别表示道路的车道的白线、位于汽车m的前方的其他车辆或者在汽车m的前方步行的行人等,判定是否有在汽车m的对象空间fs中显示为虚像v的信息(步骤s102)。此外,此时,关于基于与上述的gps接收机40协作地动作的导航功能的表示右转、左转或者前进的路径指示,也判定为在汽车m的对象空间fs中显示为虚像v的信息。
[0070]
在步骤s102中,在控制部105判定为没有显示于汽车m的对象空间fs的信息的情况下(步骤s102:否),控制部105在结束虚像显示程序r1后再次执行。即,控制部105反复执行步骤s101的处理而随时取得来自车载照相机30的汽车m的前方图像,判定是否有在汽车m的对象空间fs中显示为虚像v的信息。
[0071]
另外,在步骤s102中,在控制部105判定为有显示于汽车m的对象空间fs的信息的情况下(步骤s102:是),作为图像取得步骤,控制部105从存储部103读出包含与该信息对应的图形im的图像(步骤s103)。换言之,hud10的影像校正方法包含取得包含图形的图像的图像取得步骤。
[0072]
接下来,作为振动信息取得步骤,控制部105从振动传感器50取得汽车m的振动信息(步骤s104)。换言之,hud10的影像校正方法包含取得表示施加给移动体的振动的振动信息的振动信息取得步骤。
[0073]
接下来,控制部105基于从振动传感器50取得的振动信息,计算对图像所包含的图形im实施的校正量(步骤s105)。此外,在本实施例中,校正量表示模糊校正中的模糊校正区域ca的范围量。在本步骤中,如图6所示,控制部105将从振动传感器50取得的振动信息即振动rm分离为水平方向的振动rx和垂直方向的振动ry。另外,控制部105根据分离出的水平方
向的振动rx和垂直方向的振动ry各自的振幅,针对图形im的轮廓eg计算水平方向和垂直方向各自的模糊校正区域ca。
[0074]
接下来,控制部105生成针对图形im的轮廓eg实施了将该轮廓eg模糊的校正的校正图像(步骤s106)。在对图形im实施的校正中,通过在步骤s105中计算出的水平方向和垂直方向各自的模糊校正区域ca的范围内,使亮度和彩度朝向图形im的外侧阶段性地降低来对轮廓eg实施模糊化。
[0075]
即,步骤s105和步骤s106作为虚像显示程序r1中的图像校正步骤发挥功能。换言之,hud10的影像校正方法包含基于振动信息,对图像实施将图像内的图形im的轮廓模糊化的模糊校正来生成校正图像的图像校正步骤。
[0076]
接下来,控制部105经由输出部109对投光部20供给所生成的校正图像,使投光部20输出该校正图像的显示光lm,显示虚像v(步骤s107)。
[0077]
通过反复进行上述的虚像显示程序r1的处理,hud10能够根据汽车m的振动方向和振动量,显示可视性良好的虚像v。即,虚像显示程序r1是平视显示器的影像校正方法,该平视显示器包含搭载于移动体的投光部20,该投光部20使校正图像在空间中显示为虚像v。
[0078]
根据实施例1,hud10通过如上述那样比较简单的结构和校正处理,能够减轻由于汽车m的振动引起的虚像v的晃动所产生的可视性的降低,能够减轻驾驶员d感到的不协调感。
[0079]
此外,像上述那样,虚像显示程序r1作为hud10的软件的程序记录于存储部103,作为控制部105的cpu105a、rom105b和ram105c读出并执行该虚像显示程序r1。另外,该程序能够记录于计算机可读取的记录介质进行转让。换言之,虚像显示程序r1是执行如下的步骤的影像校正程序:图像取得步骤,hud10搭载于作为移动体的汽车m,包含使校正图像作为虚像v显示于空间的作为显示部的投光部20,在搭载于hud10的计算机中取得包含图形im的图像;振动信息取得步骤,取得表示施加给汽车m的振动的振动信息;图像校正步骤,基于振动信息,对图像实施将图像内的图形im的轮廓模糊化的模糊校正来生成校正图像。另外,虚像显示程序r1是特征在于储存虚像显示程序r1的影像校正程序的计算机可读取的记录介质。
[0080]
[实施例2]
[0081]
在实施例1中,说明了为了提高虚像v的可视性,而实施使图形im的轮廓eg周边的亮度和彩度阶段性地减少的校正处理的情况。然而,图形im的校正处理方法不限于此。作为第二实施方式,例如也可以是,为了提高虚像v的可视性而增加显示区域的一部分的亮度和彩度来增强虚像v的显示。
[0082]
图8是表示作为第二实施方式的实施例2的hud10在图3的图形im的a-a线处实施校正处理前后的亮度和彩度的强度分布的图表。图8与图4同样,纵轴相当于a-a线,横轴表示作为虚像v显示的情况下的亮度和彩度的强度。另外,图8的左侧表示实施校正处理前的图形im中的亮度和彩度的强度分布,右侧表示实施校正处理后的校正图像中的亮度和彩度的强度分布。此外,图8的左侧所示的实施校正处理前的图形im中的亮度和彩度的强度分布与图4的左侧所示的情况同样,因此省略说明。另外,本实施例2的hud10的结构与实施例1同样。在本实施例2中,在校正处理的处理内容中与实施例1不同,因此关于hud10的结构,省略说明。
[0083]
在图8的右侧的实施了校正处理后的校正图像中的亮度和彩度的强度分布中,关
于模糊校正区域ca的范围和模糊校正区域ca内的校正方法,与实施例1同样。在本实施例2中,控制部105针对轮廓eg各自的模糊校正区域ca之间的区间,形成增强校正区域ea1。控制部105在增强校正区域ea1中,实施与振动的振幅对应地使亮度和彩度从增强校正区域ea1的外端朝向图形im的中心阶段性地增加的增强校正。换言之,作为图像校正部的控制部105基于振动信息,对图像im进一步实施增强图形im的一部分的增强校正。另外,作为图像校正部的控制部105基于振动信息,使图形im的亮度和彩度朝向该图形的中心阶段性地增加来增强图形im的一部分,从而进行增强校正。
[0084]
此外,在本实施例2中,也与实施例1同样,说明仅对垂直方向的振动实施校正的例子。然而,如上所述,实际上针对水平方向的振动也实施同样的校正处理。换言之,作为图像校正部的控制部105基于水平振动信息而使图形im的水平方向上的亮度和彩度变化,基于垂直振动信息而使图形im的垂直方向上的亮度和彩度变化,从而进行增强校正。
[0085]
此外,此时增加的亮度和彩度例如是ycbcr系颜色空间。具体而言,控制部105在模糊校正区域ca中,在从校正开始点cs到校正结束点ce的范围内使亮度(y)阶段性地从图形im的保有值增加。另外,同时,控制部105实施校正处理,以使得彩度(cbcr)在cbcr颜色平面上,在经过图形im的保有值和原点(cb=0,cr=0)的直线上,远离原点。即,在显示有实施了校正处理的图形im的虚像v中,该虚像v的轮廓eg周边的明亮度从显示区域朝向外侧逐渐增加,并且颜色逐渐变浓。
[0086]
另外,控制部105使增强校正区域ea1内的亮度和彩度的最大值例如从图形im原本保持的亮度和彩度增加与振动的振幅对应的规定的比例。即,振动的振幅越大则图形im的增强校正区域ea1的范围内被越强地增强。此外,增强校正区域ea1内的亮度和彩度的最大值能够任意设定。例如,增强校正区域ea1内的亮度和彩度的最大值也可以与振动的振幅对应地从图形im所保有的ycbcr的值增加规定值。增强校正区域ea1内的亮度和彩度的最大值只要设定为校正处理后的虚像v的可视性良好即可。
[0087]
另外,也可以如图9的右侧所示,仅增强包含作为虚像v显示的图形im的中心的一部分。例如,也可以与振动的振幅对应地,将从图形im的中心起沿着图形im的校正方向的宽度的规定的比例的范围设定为增强校正区域ea2,实施使亮度和彩度从该增强校正区域ea2的外端朝向图形im的中心阶段性地增加的校正。
[0088]
根据实施例2,hud10在显示区域的中央部分即模糊校正区域ca之间的区间形成增强校正区域ea1或者ea2,增加该增强区域内的亮度和彩度。hud10使模糊校正区域ca内的校正开始点cs(即,增强校正区域ea1或者ea2的周围)的亮度和彩度相对变低而增强图形im的中心的一部分,由此能够进一步提高图形im的可视性。另外,通过实施增强图形im的中心的一部分的校正,从而例如关于白线增强标记等包含比较细的直线的图形、表示与前方的其他车辆的车间距离、直到导航时的右转、左转为止的距离的数字或者文字等,能够提高进一步可视性。
[0089]
图10是表示作为本技术的实施例2的hud10的动作程序的一例的虚像显示程序r2的图。例如在hud10的电源接通时反复执行虚像显示程序r2。
[0090]
此外,在虚像显示程序r2的步骤s201~步骤s204和步骤s207中,由于与图7所示的虚像显示程序r1的步骤s101~步骤s104和步骤s107相同,因此省略说明。
[0091]
在步骤s205中,控制部105基于从振动传感器50取得的振动信息,而计算对图像所
包含的图形im实施的校正量。此外,在本实施例中,校正量表示模糊校正中的模糊校正区域ca、增强校正区域ea的范围量以及增强校正区域ea中的亮度和彩度的最大值。控制部105根据水平方向的振动rx和垂直方向的振动ry各自的振幅,针对图形im的轮廓eg计算水平方向和垂直方向各自的模糊校正区域ca。另外,控制部105根据水平方向的振动rx和垂直方向的振动ry各自的振幅,针对图形im的中心部计算水平方向和垂直方向各自的增强校正区域ea1或者ea2。
[0092]
接下来,在步骤s206中,控制部105生成针对图形im实施将该图形im的轮廓eg模糊化的校正以及增强该图形im的中心部的校正的校正图像。控制部105在步骤s205中计算出的水平方向和垂直方向各自的模糊校正区域ca的范围内,使亮度和彩度朝向图形im的外侧阶段性地降低,由此将轮廓eg模糊化。另外,控制部105针对图形im的中心部,基于在增强校正区域ea1或者ea2的范围内水平方向的振动rx和垂直方向的振动ry各自的振幅而使亮度和彩度朝向图形im的中心阶段性地增加,从而增强图形im的中心部。
[0093]
此外,与实施例1同样,步骤s205和步骤s206作为虚像显示程序r2中的图像校正步骤发挥功能。
[0094]
通过执行包含上述的步骤s205和步骤s206的虚像显示程序r2的处理,从而控制部105能够将图形im的轮廓eg模糊化并且增强中心部,使进一步提高了可视性的虚像v显示于对象空间fs。
[0095]
此外,关于上述的模糊校正和增强校正的校正量,也可以与投影虚像v的对象空间fs中的距离对应地使校正量变化。
[0096]
图11是表示本发明的hud10所投影的虚像的显示例的图。
[0097]
虚像va、vb和vc例如是表示对汽车m行驶的车道的白线位置进行增强的白线标记的虚像。
[0098]
投影虚像va、vb和vc的对象空间fs中的距离(从驾驶员d到虚像va、vb和vc重叠的实像为止的距离)按照虚像va、vb、vc的顺序变远。此时,控制部105对于对虚像va、vb和vc分别实施的校正的校正量,投影各个虚像的距离越远则实施越大的校正量的校正,由此能够使投影到较远的位置的虚像具有较高的可视性。
[0099]
图12是表示图11所示的表示白线标记的虚像va、vb和vc各自的垂直方向的亮度和彩度的强度分布的图。
[0100]
虚像va、vb和vc像上述那样,在对象空间fs中按照虚像va、vb、vc的顺序显示在远离驾驶员d的位置。
[0101]
虚像va、vb和vc各自的校正量与和驾驶员d相距的距离对应地,按照va<vb<vc的关系使校正的强度变化。具体而言,显示在较近的距离的虚像va被实施较小的校正量的校正处理,显示于较远的距离的虚像vc被实施较大的校正量的校正处理。
[0102]
即,如图12所示,控制部105使虚像va、vb和vc各自的模糊校正区域caa、cab和cac各自的范围按照caa<cab<cac的顺序变大,越是显示于较远的距离的虚像则使轮廓eg越强地模糊。
[0103]
另外,控制部105在虚像va、vb和vc各自的增强校正区域eaa、eab和eac中,增强量即亮度和彩度的最大值按照va<vb<vc的顺序变大,实施校正以使得越是显示于较远的距离的虚像则越强地增强。
[0104]
此外,根据对象空间fs中的虚像的显示距离使校正的强度变化的校正也可以是模糊校正和增强校正中的任意一方。只要根据对象空间fs中的虚像的显示距离实施校正以提高所显示的虚像的可视性即可。
[0105]
这样,根据hud10,根据显示于对象空间fs的虚像的距离,使针对作为该虚像显示的图像的图形的模糊校正的模糊校正区域、增强校正的亮度和彩度的最大值变化。由此,在较远地显示的虚像中也能够使可视性良好,能够降低由于汽车m的振动时的虚像的偏移导致的驾驶员感到的不协调感。
[0106]
此外,本说明书中的校正处理并不局限于上述的模糊校正和增强校正,也可以测定针对图像的图形的垂直方向的亮度和彩度,对亮度和彩度的变化量较大的图形部分的前后进行校正以使变化量变少。另外,也可以在针对图像的图形的水平方向上使垂直方向的图形的形成区域不同。
[0107]
此外,上述的校正处理也可以由投光部20进行。说明上述的校正处理由投光部20进行,投光部20为液晶显示器的情况。例如,在控制部105中,向投光部20的驱动器供给包含从存储部103读出的图形im的图像、以及表示基于振动信息的水平方向和垂直方向上的模糊校正区域ca、增强校正区域ea的校正区域信号。
[0108]
投光部20的驱动器从所供给的图像提取显示该图像的单元的显示数据并保存该显示数据。
[0109]
投光部20的驱动器根据所提取的显示数据来检测在水平方向和垂直方向上亮度和彩度的变化量较多的单元。另外,投光部20的驱动器以该变化量较多的单元为起点,基于所供给的校正区域信号来校正显示数据,以使得在模糊校正区域ca的范围的单元中使亮度和彩度阶段性地降低。另外,投光部20的驱动器以该变化量较多的单元为起点,基于所供给的校正区域信号来校正显示数据,以使得在增强校正区域ea的范围的单元中使亮度和彩度阶段性地增加。
[0110]
投光部20的驱动器根据这样校正后的显示数据,对于投光部20的液晶面板各自的单元生成与该显示数据对应的驱动电压,并向投光部20的液晶面板供给,由此能够从投光部20的液晶面板投射在水平方向和垂直方向上进行了模糊校正和增强校正后的显示光lm。
[0111]
此外,即使投光部20采用有机el显示器等的自发光面板方式、使用mems反射镜的dlp或者激光扫描这样的光投射方式,也能够如上述那样在驱动器上实施校正。即,减少本技术的hud10的虚像v由于汽车m的振动引起的可视性的降低或者驾驶员d感到的不协调感的降低的校正在使用任意的显示方式的情况下的hud中都能够应用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1