一种基于无人机的智能挂线系统及方法与流程
1.本发明涉及电力塔挂线施工技术领域,具体的,涉及基于一种基于无人机的智能挂线系统及方法。
背景技术:
2.虽然随着无人机技术和传感器技术的发展,无人机在电力领域的应用越来越广泛,但很多工作还是需要人力辅助才能完成;adss牵引绳铺设过程中,需要人工爬到电力塔上安装挂线轮后,通过无人机或者人力牵引将牵引绳拖拽至挂线轮处,通过开启挂线轮的锁扣结构将牵引绳穿过或者放置在轮轴上,完成一个区段牵引绳的挂线操作,后利用牵张机将光缆用牵引绳牵引敷设至整条线路,从以上操作步骤可知,人工需要爬上电力塔进行高空作业,其弊端之一是存在安全隐患,第二弊端是挂线效率很低;第三弊端是没有发挥无人机的最大的能动性,需要人工配合才能完成挂线任务。
技术实现要素:
3.本发明的目的是解决现有牵引绳敷设存在的挂线效率低下以及无人机能动性差的问题,提出了一种基于无人机的智能挂线系统及方法,通过设置与无人机匹配使用的挂线车和匹配挂线车执行挂线任务的挂线支架,通过无人机技术和传感器技术,极大的释放了无人机执行任务的能动性,显著提高了牵引绳挂线的效率和安全性。
4.为实现上述技术目的,本发明提供的一种技术方案是,一种基于无人机的智能挂线系统,包括有无人机a、无人机b、挂线轮、挂线车以及挂线支架;执行挂线任务时:所述挂线车通过固定支架设置于无人机a的下端,所述挂线车与牵引绳的末段固定连接执行挂线任务,所述无人机b与无人机a配合使得挂线车受到牵引绳牵引力最小,执行牵引任务;所述挂线轮设置于电力塔中部塔材处,所述挂线支架固定设置于挂线轮的轮轴上端,并与电力塔材固定连接,所述挂线车在挂线支架上移动执行自动挂线任务。
5.本方案中,无人机a和无人机b配合执行挂线车定点放置和牵引绳牵引任务,挂线车和挂线支架配合执行牵引绳挂线任务,使得牵引绳穿过挂线轮放置在轮轴上,牵引绳的另一端连接有光缆,挂线时无需人工高空作业,显著的提高了挂线的安全性和挂线效率。
6.作为优选,所述挂线车包括有车体、设置与车体两侧用于传动的履带轮、对称设置于车体上部用于定位的激光发射器、对称设置于车体上部用于固定行进路线的限位板、设置在车体顶部的连接槽以及设置在车体底部用于固定牵引绳的牵引绳连接头,连接槽的底端设置有永磁铁,所述固定支架与连接槽通过磁吸力连接,所述车体通过履带轮在挂线支架上移动。
7.本方案中,采用履带轮作为车体的驱动轮,可以增大接触面积,使得车体行进的更加平稳,由于连接槽有一定的纵深,使得无人机a执行牵引任务时可以实现水平位置的拖动,减少对于磁吸力的依附作用。
8.作为优选,所述固定支架包括有连接柱和感应板,所述感应板水平设置于无人机
的底部,所述连接柱垂直于感应板设置,所述连接柱内部设置有磁铁以及缠绕于磁铁上的线圈,所述线圈通电后使得磁铁产生与永磁铁磁性相反的磁吸力,将挂线车固定于连接柱上,所述感应板与无人机电连接,通过接收激光发射器发射的信号进行信号反馈,进而调整无人机的位姿。
9.本方案中,所述感光板由若干个感光单元组成,所述感光单元可以接收来自激光发射器的激光信号,进而反应真实的挂线车的位置信息,从而实现无人机位姿微调,使得连接柱与连接槽匹配,实现无人机与挂线车的精确对接。
10.作为优选,无人机a包括有无人机主体、遥控器、摄像头;所述无人机主体内的控制器与挂线车通信,所述摄像头获取挂线支架或挂线车上的信标信息实现目标锁定后的定点悬停任务。
11.本方案中,采用无人机定点巡航技术和图像识别技术,可以实现无人机的定点悬停任务,由于无人机相关的技术公开较多,这里不做累述,其中,无人机b的下端设置有机械手臂,可以实现牵引绳的自动抓取,进而实现牵引任务。
12.作为优选,所述挂线支架包括有弧形轨道、设置在弧形轨道两端的停机板以及用于固定弧形轨道的支杆;所述弧形轨道设置在挂线轮的轮轴上端并与电力塔材固定连接,所述停机板的边缘设置有护板。
13.本方案中,所述弧形轨道和支杆配合安装在电力塔材上,可以提高弧形轨道的稳定性,同时弧形轨道可以扩大无人机与电力塔中部塔材的空间距离,使得无人机具有更大的操作空间,提高其执行任务时的安全性。
14.作为优选,所述弧形轨道的下底开设有便于牵引绳连接头放线的槽口,所述弧形轨道的上底开设有匹配限位板的导向槽;所述停机板开设有与槽口连通的弧形双开岔口,所述弧形双开岔口匹配所述牵引绳连接头。
15.本方案中,弧形轨道的导向槽可以保证挂线车沿既定路线运行至另一端,设置在挂线车下端的牵引绳连接头通过槽口将牵引绳放置在轮轴上实现挂线任务。
16.作为优选,所述履带轮包括有传动齿轮和传动履带,所述传动齿轮由车体内的驱动电机驱动,所述传动齿轮与传动履带实现传动。
17.本方案中,传动履带可以扩大挂线车与挂线支架的接触面积,进而保证挂线车的平稳运行。
18.作为优选,所述传动履带由若干个磁性履带板和非磁性履带板通过铰链间隔设置,所述磁性履带板提供车体平置在挂线支架上的吸附力。
19.本方案中,所述磁性履带板的吸附力提供挂线车所必须的一定的抓地力,是的挂线车在高空作业时更加的平稳,其中,非磁性履带板也可以由非磁性履带板与磁性贴片组合进行制作得到。
20.作为优选,所述停机板和挂线车均设置有用于无人机辨识的信标,所述无人机根据信标执行定位后的定点悬停任务。
21.作为优选,所述信标作为无人机识别的目标物,由前期经过人工智能算法(如神经网络)训练后,可以根据信标进行精确的定位,进而根据无人机定位技术自动进行位置追踪和定点悬停。
22.一种无人机挂线方法,适用于所述的基于无人机的智能挂线系统,包括如下步骤:
s1、无人机a连接牵引绳的牵引端,无人机b连接牵引绳的中部为无人机a的拖拽操作提供辅助牵引作用;s2、地面操作人员通过遥控器对无人机a和无人机b进行控制,摄像头开启获取停机板上的信标信息,进行目标锁定,通过无人机定位技术进行方位和距离的运算后执行定点悬停任务;s3、无人机a将挂线车平置在停机板上后,线圈断电使得无人机与挂线车分离;s4、无人机与挂线车通信,挂线车得到行进命令后沿着弧形轨道行进至另一端的停机板后停止;牵引绳通过槽口放置在轮轴上实现挂线操作;s5、无人机a上的摄像头开启获取挂线车上的信标信息,进行目标锁定,通过无人机定位技术悬停至挂线车的上方;同时,挂线车上的激光发射器发射激光信号,感应板接收激光发射器发射的信号进行信号反馈至无人机,无人机根据反馈信号进而调整无人机的位姿后下降使得连接柱与连接槽抵接,给线圈通电后使得连接柱与永磁铁强力吸附,将挂线车从挂线支架上分离后执行下一挂线区段的挂线操作;同时,无人机b释放该段牵引绳后,执行下一挂线区段的牵引绳牵引任务。
23.本发明的有益效果:本发明提出了一种基于无人机的智能挂线系统及方法,通过设置与无人机匹配使用的挂线车和匹配挂线车执行挂线任务的挂线支架,通过无人机技术和传感器技术,极大的释放了无人机执行任务的能动性,显著提高了牵引绳挂线的效率和安全性。
附图说明
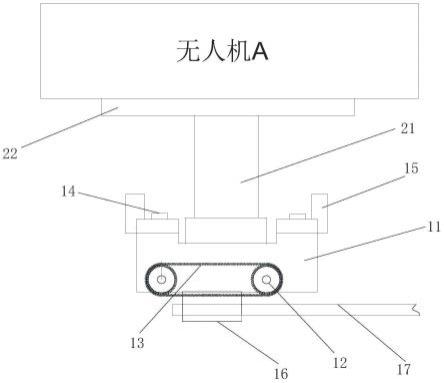
24.图1为本发明的一种基于无人机的智能挂线系统的局部结构示意图。
25.图2为本发明的挂线支架结构示意图。
26.图3为本发明的弧形轨道截面结构图。
27.图4为本发明的挂线支架安装位置示意图。
28.图中标记说明:11-车体、12-传动齿轮、13-传动履带、14-激光发射器、15-限位板、16-牵引绳连接头、17-牵引绳、21-连接柱、22-感光板、3-挂线支架、31-停机板、32-支杆、33-弧形轨道、311-弧形双开岔口、331-导向槽、332-槽口;4-挂线轮、41-轮轴。
具体实施方式
29.为使本发明的目的、技术方案以及优点更加清楚明白,下面结合附图和实施例对本发明作进一步详细说明,应当理解的是,此处所描述的具体实施方式仅是本发明的一种最佳实施例,仅用以解释本发明,并不限定本发明的保护范围,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.实施例:如图1所示,一种基于无人机的智能挂线系统,由无人机a、无人机b(未示出)、挂线轮4、挂线车以及挂线支架3组成;执行挂线任务时:所述挂线车通过固定支架设置于无人机a的下端,所述挂线车与牵引绳17的末段固定连接执行挂线任务,所述无人机b与无人机a配合使得挂线车受到牵引绳牵引力最小,执行牵引任务;所述挂线轮设置于电力塔中部塔材处,如图4所示,所述挂线支架固定设置于挂线轮的轮轴41上端,并与电力塔中部塔材处固定连接,所述挂线车在挂线支架上移动执行自动挂线任务。
31.本实施例中,无人机a和无人机b配合执行挂线车定点放置和牵引绳牵引任务,挂线车和挂线支架配合执行牵引绳挂线任务,使得牵引绳穿过挂线轮放置在轮轴上,其中,挂线车的行进距离可以根据挂线支架的两端停机板的距离进行设置;挂线时无需人工高空作业,显著的提高了挂线的安全性和挂线效率,当牵引绳穿过一个挂线轮或者多个挂线轮后,通过牵张机与牵引绳连接,利用牵张机将光缆用牵引绳牵引敷设至整条线路。
32.所述挂线车包括有车体11、设置与车体两侧用于传动的履带轮、对称设置于车体上部用于定位的激光发射器14、对称设置于车体上部用于固定行进路线的限位板15、设置在车体顶部的连接槽以及设置在车体底部用于固定牵引绳的牵引绳连接头16,连接槽的底端设置有永磁铁,所述固定支架与连接槽通过磁吸力连接,所述车体通过履带轮在挂线支架上移动。
33.本实施例中,采用履带轮作为车体的驱动轮,可以增大接触面积,使得车体行进的更加平稳,由于连接槽有一定的纵深,使得无人机a执行牵引任务时可以实现水平位置的拖动,减少对于磁吸力的依附作用。
34.固定支架包括有连接柱21和感应板22,所述感应板水平设置于无人机的底部,所述连接柱垂直于感应板设置,所述连接柱内部设置有磁铁(未示出)以及缠绕于磁铁上的线圈(未示出),所述线圈通电后使得磁铁产生与永磁铁磁性相反的磁吸力,将挂线车固定于连接柱上,所述感应板与无人机电连接,通过接收激光发射器发射的信号进行信号反馈,进而调整无人机的位姿。
35.本实施例中,所述感光板由若干个感光单元组成,所述感光单元可以接收来自激光发射器的激光信号,进而反应真实的挂线车的位置信息,从而实现无人机位姿微调,使得连接柱与连接槽匹配,实现无人机与挂线车的精确对接。
36.无人机a包括有无人机主体、遥控器、摄像头;所述无人机主体内的控制器与挂线车通信,所述摄像头获取挂线支架或挂线车上的信标信息实现目标锁定后的定点悬停任务。
37.本实施例中,采用无人机定点巡航技术和图像识别技术,可以实现无人机的定点悬停任务,由于无人机相关的技术公开较多,这里不做累述,其中,无人机b的下端设置有机械手臂,可以实现牵引绳的自动抓取,进而实现牵引任务。
38.如图2所示,所述挂线支架包括有弧形轨道33、设置在弧形轨道两端的停机板31以及用于固定弧形轨道的支杆32;所述弧形轨道设置在挂线轮的轮轴上端并与电力塔中部塔材处固定连接,所述停机板的边缘设置有护板(未示出)。
39.本实施例中,所述弧形轨道和支杆配合安装在电力塔中部塔材上,可以提高弧形轨道的稳定性,同时弧形轨道可以扩大无人机与电力塔中部塔材的空间距离,使得无人机具有更大的操作空间,提高其执行任务时的安全性。
40.如图3所示,所述弧形轨道的下底开设有便于牵引绳连接头放线的槽口332,所述弧形轨道的上底开设有匹配限位板的导向槽331;所述停机板开设有与槽口连通的弧形双开岔口311,所述弧形双开岔口匹配所述牵引绳连接头。
41.本实施例中,弧形轨道的导向槽可以保证挂线车沿既定路线运行至另一端,设置在挂线车下端的牵引绳连接头通过槽口将牵引绳放置在轮轴上实现挂线任务。
42.所述履带轮包括有传动齿轮12和传动履带13,所述传动齿轮由车体内的驱动电机
驱动,所述传动齿轮与传动履带实现传动。
43.本实施例中,传动履带可以扩大挂线车与挂线支架的接触面积,进而保证挂线车的平稳运行。
44.所述传动履带由若干个磁性履带板和非磁性履带板通过铰链间隔设置,所述磁性履带板提供车体平置在挂线支架上的吸附力。
45.本实施例中所述磁性履带板的吸附力提供挂线车所必须的一定的抓地力,是的挂线车在高空作业时更加的平稳,其中,非磁性履带板也可以由非磁性履带板与磁性贴片组合进行制作得到。
46.本实施例中,所述停机板和挂线车均设置有用于无人机辨识的信标,所述无人机根据信标执行定位后的定点悬停任务。
47.所述信标作为无人机识别的目标物,由前期经过人工智能算法(如神经网络)训练后,可以根据信标进行精确的定位,进而根据无人机定位技术自动进行位置追踪和定点悬停。
48.一种无人机挂线方法,适用于所述的基于无人机的智能挂线系统,包括如下步骤:s1、无人机a连接牵引绳的牵引端,无人机b连接牵引绳的中部为无人机a的拖拽操作提供辅助牵引作用;s2、地面操作人员通过遥控器对无人机a和无人机b进行控制,摄像头开启获取停机板上的信标信息,进行目标锁定,通过无人机定位技术进行方位和距离的运算后执行定点悬停任务;s3、无人机a将挂线车平置在停机板上后,线圈断电使得无人机与挂线车分离;s4、无人机与挂线车通信,挂线车得到行进命令后沿着弧形轨道行进至另一端的停机板后停止;牵引绳通过槽口放置在轮轴上实现挂线操作;s5、无人机a上的摄像头开启获取挂线车上的信标信息,进行目标锁定,通过无人机定位技术悬停至挂线车的上方;同时,挂线车上的激光发射器发射激光信号,感应板接收激光发射器发射的信号进行信号反馈至无人机,无人机根据反馈信号进而调整无人机的位姿后下降使得连接柱与连接槽抵接,给线圈通电后使得连接柱与永磁铁强力吸附,将挂线车从挂线支架上分离后执行下一挂线区段的挂线操作;同时,无人机b释放该段牵引绳后,执行下一挂线区段的牵引绳牵引任务。
49.以上所述之具体实施方式为本发明一种基于无人机的智能挂线系统及方法的较佳实施方式,并非以此限定本发明的具体实施范围,本发明的范围包括并不限于本具体实施方式,凡依照本发明之形状、结构所作的等效变化均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1