基于光路自动对准指向精准控制的多路激光拼接合成系统
1.本发明涉及光学系统和光束控制领域,尤其是多路激光拼接合成中的光路对准和指向操控方法的技术领域,具体是一种基于光路自动对准指向精准控制的多路激光拼接合成系统。
背景技术:
2.随着精密激光加工、激光通信、生物光子研究等激光应用领域的技术发展,对输出激光束的功率和光束质量要求越来越高。单台激光器由于受到增益介质热效应和非线性效应等因素的影响,在功率和光束质量方面已难以满足部分应用需求。为了解决这一问题,科研人员另辟蹊径,提出了光束合成的方法。多路激光拼接合成作为一类光束合成方法,已成功应用于激光加工、空间激光通信等多种领域。
3.拼接合成的基本原理是通过光束控制方法让多路激光紧密排列、同向输出,根据是否锁相,可以将拼接合成分为非相干合成和相干合成。非相干合成是将多路激光源紧密拼接在一起,通过指向控制使每路激光的输出方向相同,各路激光最终会聚到同一个远场位置。相干合成则是将多路相干光源紧密拼接在一起,先通过指向控制使每路激光同向,然后再通过锁相控制,保证各路激光束相位一致,最终实现远场相干叠加。无论是非相干合成系统,还是相干合成系统,光路对准和指向精准控制都是其关键技术之一。
4.近年来,激光拼接合成技术发展迅速,主要成果有:美国海军研究实验室的sprangl等人在2008年报道了4路光纤激光(总功率6.2kw),经1.2km大气传输后的非相干合成实验结果,传输效率达94%(phillip sprangle,antonio ting,joseph penano,et al.incoherent combining and atmospheric propagation of high-power fiber lasers for directed-energy applications[j].ieee journal of quantum electronics,2009,45(2):138~148);美国诺格公司在2009年实现了7路板条固体激光相干合成,105kw的功率输出也是目前通过相干合成方式获得的最高功率(s.j.mcnaught,c.p.asman,h.injeyan,et al.100-kw coherently combined nd:yag mopa laser array[c].in frontiers in optics,osa technical digest(cd),optical socienty ofamerica,2009:paper fthd2);2012年,国防科技大学采用spgd算法实现9路、1.8kw功率输出的光纤激光相干合成实验(x.wang,j.leng,p.zhou,et al.1.8-kw simultaneous spectral and coherent combining of three-tone nine-channel all-fiber amplifier array[j].appl.phys.b,2012,107:785~790);2014年,中国工程物理研究院颜宏等人报道了四路百瓦级板条固体激光相干合成实验结果,合成光束质量bq《1.3,峰值光强提高2.8倍(颜宏.四路百瓦级板条激光相干合成实验研究[j].中国工程物理研究院科技年报,2014,165~166);2014年,美国国防部先进研究计划局报道了“圣剑”(excalibur)计划的最新进展,以一款21单元的光纤激光相控阵为发射装置,采用基于til控制的延迟spgd优化算法,于七公里处实现了激光阵列的相干合成(v.coffey,new advances in defense applications:high-energy lasers.optics&photonics news,2014,1047-6938/14/10/
28/8);2019年,国防科技大学报道了60路大阵元光纤激光相干合成结果,合成后条纹对比度约为97%(粟荣涛,马阎星等.60路大阵元光纤激光高效相干合成[j].红外与激光工程,2019,48(1))。
[0005]
分析目前已报道的拼接合成系统,其使用的指向控制方式主要有三种。第一种方式没有自动闭环控制回路,靠手动调节使每路激光远场重合,这种方式精度低、实用性弱,只适合某些低功率条件下的实验室原理验证实验。第二种方式采用随机并行梯度下降算法(spgd)等优化方法,以合成远场的某个参数为优化对象,完成多路激光指向控制,实现合成激光共轴输出。这种方式结构简单、系统成本低,但是存在两个显著缺点:一是系统控制带宽会随着合成路数的增加而变小,难以满足拼接合成向大规模、超大规模方向发展的指向控制带宽要求;二是控制稳定性较差,容易出现陷入局部极值的情况。第三种方式利用单个独立相机探测每路激光光轴,然后通过控制器控制每个相机对应激光的指向。这种方式需要用到与合成激光路数相等的相机个数,系统成本高,难以应用到大规模、超大规模拼接合成系统。
[0006]
中国科学院光电技术研究所在发明专利(申请号cn102608764a)中提出了一种利用微透镜阵列和单个相机相配合实现合成子激光束光轴探测和实时闭环控制的指向调控方法。这种方式系统结构简单,控制稳定性较好,易于扩展。但是对光路调节要求高,需要将每路子激光远场光斑调整到子孔径范围,在大规模拼接合成系统中操作较为困难。另外,运动平台难免会受到外部冲击、突发强烈震动等情形,而该方法的指向探测动态范围较小,极易导致子激光远场光斑超出子孔径范围,出现闭环紊乱或无法闭环。为了减小光路调节难度、提升系统抗干扰能力,本发明提出一种光路自动对准和指向精准控制的多路激光拼接合成系统,将优化算法和微透镜阵列法相结合,实现光路自动对准和突发大指向误差的稳定闭环,为激光拼接合成系统更好地应用于运动平台提供技术支撑。
技术实现要素:
[0007]
本发明拟解决的技术问题:(1)激光拼接合成中较大准静态对准偏差的自动调整;(2)一定频率范围内光轴抖动的精准控制;(3)外部冲击等因素带来的突发较大指向误差的稳定闭环控制。
[0008]
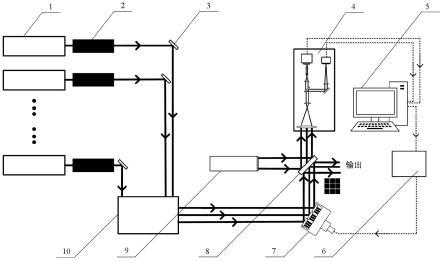
本发明实现上述技术目标所采用的技术方案是:一种基于光路自动对准指向精准控制的多路激光拼接合成系统包括激光器组1、扩束准直系统2、反射镜组3、复合传感器4、控制计算机5、高压放大器6、分块倾斜镜7、分光镜8、光阑9、标定光源10、合束器11。激光器组1输出激光被扩束准直系统2扩束整形成满足设计要求的光束尺寸,然后通过反射镜组3调节各路激光位置,使其满足合束器11的输入位置要求,各路激光经合束器11调整形成高占空比的预期排布方式,分块倾斜镜7子镜的空间排布与合成光束的一致,每块倾斜子镜与其中一路激光对应,合成光束自合束器后依次经过分块倾斜镜7和分光镜8,最终由分光镜8发射出去。透过分光镜8的少部分激光进入复合传感器4,首先穿过由透镜一4001和透镜二4002组成的主缩束镜头,然后被分光镜4003分成两部分,被分光镜4003反射的这部分激光依次经过反射镜4010和聚焦透镜4009,进入位于聚焦透镜4009焦面上的远场探测相机4008,实现合成光束的远场探测,该合成远场同时被用作光路自动对准控制和合成效果评价。透过分光镜4003的激光则依次经过由透镜三4004和透镜四4005组成的次级缩束镜头和
微透镜阵列4006,进入位于微透镜阵列4006焦面上的子光斑探测相机(4007),完成每路子激光束指向的实时测量。
[0009]
在激光器出光之前,需要提前用平行光对复合传感器4进行标定,标定过程如下:标定光源10输出的平行光通过光阑调整光束口径,使其与合成光束口径一致,然后经分光镜8反射进入复合传感器4。平行光穿过由透镜一4001和透镜二4002组成的主缩束镜头,然后被分光镜4003分成两部分。被分光镜4003反射的这部分光依次经过反射镜4010和聚焦透镜4009,进入位于聚焦透镜4009焦面上的远场探测相机4008,在远场探测相机4008上形成一个近衍射极限的远场光斑,记录下该远场光斑质心位置,作为光路自动对准基准。透过分光镜4003的光则依次经过由透镜三4004和透镜四4005组成的次级缩束镜头和微透镜阵列4006,各自会聚到位于微透镜阵列4006焦面上的子光斑探测相机4007,形成近衍射极限的远场子光斑阵列,远场子光斑数量和排布方式与微透镜阵列一一对应,记录下每个子光斑的质心位置,作为各路激光指向校正基准。至此,复合传感器标定完毕。
[0010]
在光路调整阶段,每路激光指向经手动粗调使其均进入远场探测相机4008视场,但由于子光斑探测相机4007子孔径视场范围较小,此时部分远场子光斑会超出子孔径视场范围。在系统正式工作阶段,计算机5首先根据远场探测相机4008探测信号和标定基准利用控制算法通过高压放大器6驱动分块倾斜镜7校正各路激光的对准误差,使每路激光进入子光斑探测相机4007对应子孔径视场,然后切换到子光斑探测相机4007控制回路,计算机5根据子光斑探测相机4007探测信号和标定基准利用控制算法通过高压放大器6驱动分块倾斜镜7校正各路激光光轴偏差,实现合成光束的高精度稳定指向控制。
[0011]
实现光路自动对准的方式是:在复合传感器标定阶段,标定平行光进入复合传感器在远场探测相机4008形成远场光斑,将其质心坐标记为(x
d0
,y
d0
)。在系统正式工作阶段,计算机5采集一幅远场探测相机4008的图像,计算图像的等效半径r0,计算公式为:其中n和m为图像的列和行像素总数,xi和yi为图像第i列第j行对应坐标值,i(xi,yj)为第i列第j行像元对应灰度值。以等效半径r0作为性能指标,利用随机平行梯度下降(spgd)算法等优化方法计算得到控制电压,通过高压放大器6将电压放大后驱动分块倾斜镜校正激光束与对应子孔径对准误差。在光路自动对准过程中,实时监测子光斑探测相机4007每个子孔径接收到的光能量,当与合成激光对应的所有子孔径内的灰度值和大于给定阈值时,表明激光束与对应子孔径已基本对准,记录此时分块倾斜镜驱动器电压值并切换到子光斑探测相机4007控制回路。
[0012]
实现合成光束高精度指向控制的方式是:在复合传感器标定阶段,标定平行光进入复合传感器在子光斑探测相机4007形成子光斑阵列,将第k路激光的定标质心坐标记为(p
k0
,q
k0
),切换到子光斑探测相机4007控制回路后计算得到第s帧第k路激光的质心坐标为相对于定标质心偏移量为采用经典的pi控制方法更新两个方向的控制电压为:其中a和b为控制参数,和为第s时刻第k路激光在x和y两个方向上的控制电压,和为第s+1时刻第k路激光
在x和y两个方向上的控制电压,和为第s时刻第k路激光在x和y两个方向质心偏移量,该电压通过高压放大器放大后驱动分块倾斜镜校正每路激光的静态和动态光轴偏差,实现光轴实时闭环控制。
[0013]
进一步地,所述激光器组1包含光纤激光器、固体激光器等一切可以转换成空间光束的激光器。
[0014]
进一步地,所述的光路对准优化方法包括随机并行梯度下降算法(spgd),爬山法,遗传算法等。
[0015]
进一步地,所述光路对准与高精度指向控制的切换方式不但包括系统启动时当所有子孔径内的灰度值和大于给定阈值时由光路对准模式切换为高精度指向控制模式,也包括在高精度指向控制模式阶段由于瞬时冲击等因素导致部分或全部子孔径内的灰度值和小于给定阈值时,控制方式由高精度指向模式切换为光路对准模式,当所有子孔径内的灰度值和再次大于给定阈值时再切换回高精度指向控制模式。
[0016]
本发明与现有技术相比具有如下优点:
[0017]
1、本发明实现了较大准静态偏差的自动对准,降低了对光路手动调整的要求,提升了拼接合成系统对光路对准偏差的容忍度;
[0018]
2、本发明将优化算法与微透镜阵列法相结合,在不显著增加系统复杂度的情况下,同时实现了光路自动对准和指向精准控制,为拼接合成系统后续朝大规模、超大规模方向发展提供了一种技术选择;
[0019]
3、本发明通过光路自动对准和指向精准控制两个控制回路的灵活切换,可以对一定程度的外部冲击、短时强烈震动等部分突发状况实现稳定闭环,提升指向控制稳定性,拓展拼接合成系统的环境适应能力。
附图说明
[0020]
图1为本发明整体结构示意图;其中:1是激光器组,2是扩束准直系统,3是反射镜组,4是复合传感器,5是控制计算机,6是高压放大器,7是分块倾斜镜,8是分光镜,9是光阑,10是标定光源,11是合束器;
[0021]
图2为所用复合传感器结构示意图;其中:4001是透镜一,4002是透镜二,4003是分光镜,4004是透镜三,4005是透镜四,4006是微透镜阵列,4007是子光斑探测相机,4008是远场探测相机,4009是聚焦透镜,4010是反射镜;
[0022]
图3为合成光束空间排布示意图;
[0023]
图4为分块倾斜镜子镜排布示意图;
[0024]
图5为子激光束与微透镜阵列的匹配关系示意图;
[0025]
图6为微透镜阵列成像方式示意图;
[0026]
图7为闭环控制之前远场探测相机光斑和子光斑探测相机光斑示意图,其中,图7(a)为闭环控制之前远场探测相机光斑示意图,图7(b)为闭环控制之前子光斑探测相机光斑示意图;
[0027]
图8为光路对准之前、由光路对准切换至指向精准控制时刻、精准控制稳定闭环后远场探测相机和子光斑探测相机的光斑图像;其中,图8(a1)、图8(a2)分别为光路对准之前远场探测相机和子光斑探测相机的光斑图像,图8(b1)、图8(b2)为由光路对准切换至指向
精准控制时刻的远场探测相机和子光斑探测相机的光斑图像,图8(c1)、图8(c2)为精准控制稳定闭环后远场探测相机和子光斑探测相机的光斑图像;
[0028]
图9为远场探测相机探测到的合成远场斯特列尔比(sr)的变化曲线。
具体实施方式
[0029]
下面结合附图以及具体实施方式进一步说明本发明。
[0030]
如图1所示,本发明一种基于光路自动对准指向精准控制的多路激光拼接合成系统,包括9套激光器1、9套扩束准直系统2、9套反射镜组3、1套复合传感器4、1台控制计算机5、1套高压放大器6、1套分块倾斜镜7、1块分光镜8、1个光阑9、1套标定光源10、1套合束器11。9套激光器输出激光被各自对应扩束准直系统扩束整形成正方形,然后通过反射镜组3调节各路激光位置,使其满足合束器11的输入位置要求,各路激光经合束器11调整形成高占空比的预期排布方式,如图3所示。分块倾斜镜7子镜的空间排布如图4所示,与合成光束的排布一致,每块倾斜子镜与其中一路激光对应。合成光束自合束器后依次经过分块倾斜镜7和分光镜8,最终由分光镜8发射出去。
[0031]
透过分光镜8的少部分激光进入复合传感器4,实现合成光束的远场探测和子激光束指向的高精度探测,复合传感器内部结构如图2所示。合成光束首先穿过由透镜一4001和透镜二4002组成的主缩束镜头,然后被分光镜4003分成两部分,被分光镜4003反射的这部分激光依次经过反射镜4010和聚焦透镜4009,进入位于聚焦透镜4009焦面上的远场探测相机4008,实现合成光束的远场探测,该合成远场同时被用作光路自动对准控制和合成效果评价。透过分光镜4003的激光则依次经过由透镜三4004和透镜四4005组成的次级缩束镜头和微透镜阵列4006,进入位于微透镜阵列4006焦面上的子光斑探测相机4007,完成每路子激光束指向的实时测量,子激光束与微透镜阵列的匹配关系和成像方式如图5和图6所示。
[0032]
在激光器出光之前,需要提前用平行光对复合传感器4进行标定,标定过程如下:标定光源10输出的平行光通过光阑调整光束口径,使其与合成光束口径一致,然后经分光镜8反射进入复合传感器4。平行光穿过由透镜一4001和透镜二4002组成的主缩束镜头,然后被分光镜4003分成两部分。被分光镜4003反射的这部分光依次经过反射镜4010和聚焦透镜4009,进入位于聚焦透镜4009焦面上的远场探测相机4008,在远场探测相机4008上形成一个近衍射极限的远场光斑,记录下该远场光斑质心位置,作为光路自动对准基准。透过分光镜4003的光则依次经过由透镜三4004和透镜四4005组成的次级缩束镜头和微透镜阵列4006,各自会聚到位于微透镜阵列4006焦面上的子光斑探测相机4007,形成近衍射极限的远场子光斑阵列,远场子光斑数量和排布方式与微透镜阵列一一对应,记录下每个子光斑的质心位置,作为各路激光指向校正基准。
[0033]
在光路调整阶段,每路激光指向经手动粗调使其均进入远场探测相机4008视场,如图7(a)所示,但由于子光斑探测相机4007子孔径视场范围较小,此时部分远场子光斑会超出子孔径视场范围,如图7(b)所示。接着依次进行光路自动对准和指向精准控制,其具体实施方法和步骤为:
[0034]
1、将远场探测相机4008的定标质心坐标记为(x
d0
,y
d0
),其位置如图7(a)的十字叉,将子光斑探测相机4007第k路激光的定标质心坐标记为(p
k0
,q
k0
),其位置如图7(b)的十字叉;
[0035]
2、第t时刻,作用于分块倾斜镜的电压为随机生成一组均值为零、服从伯努利分布的微小电压扰动
[0036]
3、将电压控制信号作用于分块倾斜镜,其中,为第t时刻作用于分块倾斜镜的电压,采集一幅远场探测相机4008的图像,计算图像的等效半径r0并赋给j
+
,j
+
为施加正向扰动电压的性能指标,等效半径计算公式为:其中n和m为图像的列和行像素总数,xi和yi为图像第i列第j行对应坐标值,i(xi,yj)为第i列第j行像元对应灰度值;
[0037]
4、将电压控制信号作用于分块镜,采集一幅远场探测相机4008的图像,计算图像的等效半径r0并赋给j-,j-为施加负向扰动电压的性能指标;
[0038]
5、将控制电压信号更新为其中γ为spgd算法的增益系数;
[0039]
6、采集一幅子光斑探测相机4007的图像,计算子孔径范围内的灰度值和i
k∑
,若所有子孔径范围内的灰度值和均大于给定阈值,则进入下一步,否则回到步骤2进入下一次迭代;
[0040]
7、利用步骤6采集到的子光斑探测相机4007的图像,计算第k路激光的质心坐标为相对于定标质心偏移量为
[0041]
8、采用经典pi控制方法更新两个方向的控制电压为:其中a和b为控制参数;其中,和为第s时刻第k路激光在x和y两个方向上的控制电压,和为第s+1时刻第k路激光在x和y两个方向上的控制电压,和为第s时刻第k路激光在x和y两个方向质心偏移量;
[0042]
9、回到步骤6,进入下一次控制运算。
[0043]
光路对准之前、由光路对准切换至指向精准控制、精准控制稳定闭环后三个时刻的远场探测相机4008和子光斑探测相机4007的光斑图像分别如图8(a1)(a2)、图8(b1)(b2)和图8(c1)(c2)所示。整个控制过程中,远场探测相机4008探测到的合成远场斯特列尔比(sr)的变化曲线如图9所示。
[0044]
所述激光器组1包含光纤激光器、固体激光器等一切可以转换成空间光束的激光器。
[0045]
所述的光路对准优化方法还可以是爬山法,遗传算法等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1