压印装置、压印方法和物品制造方法与流程
1.本发明涉及一种压印装置、压印方法和物品制造方法。
背景技术:
2.在压印装置中,通过在布置于基板上的压印材料与模具接触的状态下固化该压印材料,来将模具的图案转印到压印材料。在纳米压印装置中,重要的是使模具和基板上的压印材料处于基板和模具彼此平行的状态。图2a和图2b示出了如下状态的放大图,在该状态中,在基板5和模具3不平行的状态下使模具3和基板5的压射区域20上的压印材料14彼此接触。由于基板5和模具3不平行的事实,基板5的区域21未被压印材料14填充,并且压印材料14已经在另一区域22中溢出到压射区域20的外部。基板5和模具3不平行的事实会导致压印材料14的厚度不均匀。这会产生诸如降低线宽均匀性的负面影响,并降低产率。另外,基板5与模具3之间的间隔不是目标间隔的事实也会导致压印材料14的厚度偏离目标厚度。这也会产生诸如降低线宽均匀性的负面影响,并降低产率。
3.日本特开第2005-101201号公报公开了,在通过将模具按压在待处理的物体上来转印图案的纳米压印装置中,执行控制以使得模具的按压方向保持在相对于模具的图案形成表面的垂直方向上。
4.如果可以指定基板表面的形状,则可以获得基板的压射区域中的基板的倾斜度和/或高度,从而使得可以获得压射区域与模具之间的相对倾斜度和/或相对间隔。基板的表面可以具有例如二次曲面的形状。为了获得表示二次曲面的形状的近似函数,需要在至少六个测量点处测量基板表面的高度。为了提高近似精度,优选的是,例如,通过将测量点的数量设置为七至十个点,使用最小二乘法来确定近似函数。然而,由于增加测量点的数量将会相应地延长测量所需的时间,因此会降低吞吐量。另一方面,由于减少测量点的数量将会妨碍精确地测量基板表面的形状,因此无法精确地获得压射区域的倾斜度。此外,由于基板的表面可能具有比二次函数更高阶的形状,因此将需要更长的时间来确定更高阶的近似函数。
技术实现要素:
5.本发明提供了一种通过在短时间内精确地测量基板表面的形状而有利于提高产率和吞吐量的技术。
6.本发明的第一方面提供了一种压印装置,其通过使用模具来执行用于使压印材料成形的压印处理,该压印装置包括:控制器,其被构造为获得指示第一基板的表面的高度分布的第一高度分布信息;以及测量设备,其被构造为获得指示第二基板的表面的高度分布的第二高度分布信息,其中,控制器还被构造为基于校正后的高度分布信息和第二分量来控制压印处理,所述校正后的高度分布信息是通过从第一高度分布信息中去除第一分量而获得的,所述第一分量是用于近似第一高度分布信息的阶数不大于第一预定阶的近似函数,所述第二分量是用于近似第二高度分布信息的阶数不大于第二预定阶的近似函数。
7.本发明的第二方面提供了一种压印分法,其通过使用模具来执行用于使压印材料在基板上成形的压印处理,该压印方法包括:获得指示第一基板的表面的高度分布的第一高度分布信息;获得指示第二基板的表面的高度分布的第二高度分布信息;通过从第一高度分布信息中去除第一分量来获得校正后的高度分布信息,所述第一分量是用于近似第一高度分布信息的阶数不大于第一预定阶的近似函数;获得第二分量,所述第二分量是用于近似第二高度分布信息的阶数不大于第二预定阶的近似函数;以及基于校正后的高度分布信息和第二分量来控制对第二基板的压印处理。
8.本发明的第三方面提供了一种物品制造方法,该物品制造方法包括:通过如本发明的第二方面所限定的压印方法在基板上形成图案;以及通过对形成有图案的基板进行处理来获得物品。
9.根据下面参照附图对示例性实施例的描述,本发明的另外的特征将变得清楚。
附图说明
10.图1是示出根据实施例的压印装置的布置的图;
11.图2a和图2b是示出当基板和模具彼此不平行时进行压印处理的状态的放大图;
12.图3是示出图案形成作业的过程的流程图;
13.图4是示意性地示出图案形成作业中的压印装置的状态变化的图;
14.图5是示出图3的流程图的步骤s105的处理过程的流程图;
15.图6是示意性地示出图5的流程图中所示的过程的主要处理的图;
16.图7是示意性地示出图5的流程图中所示的过程的主要处理的图;
17.图8是预对准的概念图;
18.图9是示意性地示出具有四次形状的基板的图;
19.图10是示出测量点的布置示例的图;
20.图11是示出失败示例的图;
21.图12是示出校准处理的过程的流程图;
22.图13是示意性地示出图12所示的校准处理的主要处理的图;
23.图14是代替图5的流程图中所示的根据第一实施例的处理而要执行的处理的流程图;
24.图15是示意性地示出图14的流程图中所示的过程的主要处理的图;以及
25.图16a至图16f是示出物品制造方法的图。
具体实施方式
26.在下文中,将参照附图详细地描述实施例。请注意,以下实施例并非旨在限制要求保护的发明范围。在实施例中描述了多个特征,但是并不限于需要所有这些特征的发明,并且可以适当地组合多个这样的特征。此外,在附图中,相同的附图标记被赋予相同或相似的构造,并且省略其多余的描述。
27.图1示出了压印装置1的布置。压印装置1可以被形成为执行压印处理,该压印处理使用模具以在基板上使压印材料成形。作为压印材料,使用要通过接收固化能量而固化的可固化组合物(也称为未固化状态的树脂)。可以使用电磁波或热,作为固化能量。电磁波可
以是例如选自大于或等于10nm至小于或等于1mm以下的波长范围的光,例如,红外光、可见光束或紫外光。可固化组合物可以是通过光照射或加热而固化的组合物。在组合物当中,通过光照射而固化的光固化组合物至少含有聚合性化合物和光聚合引发剂,并且根据需要还可以含有溶剂或非聚合性化合物。非聚合性化合物是选自由敏化剂、氢供体、内部脱模剂、表面活性剂、抗氧化剂和聚合物组分构成的组中的至少一种材料。压印材料可以以液滴的形式或者以通过连接多个液滴而形成的岛状或膜状的形式布置于基板上。可以通过旋涂机或狭缝涂布机将压印材料作为膜供应到基板上。压印材料的粘度(25℃下的粘度)可以是例如大于或等于1mpa
·
s至小于或等于100mpa
·
s。作为基板的材料,例如,可以使用玻璃、陶瓷、金属、半导体、树脂等。根据需要,可以在基板的表面上设置由与基板不同的材料制成的构件。基板是例如硅晶圆、化合物半导体晶圆或石英玻璃。
28.在说明书和附图中,各方向将在xyz坐标系中指示,其中,平行于基板5的表面的方向被定义为x-y平面。平行于xyz坐标系的x轴、y轴和z轴的方向分别是x方向、y方向和z方向。围绕x轴的旋转、围绕y轴的旋转和围绕z轴的旋转分别是θx、θy和θz。关于x轴、y轴和z轴的控制或驱动分别是指关于平行于x轴的方向、平行于y轴的方向和平行于z轴的方向的控制或驱动。另外,关于θx轴、θy轴和θz轴的控制或驱动分别是指关于围绕平行于x轴的轴的旋转、围绕平行于y轴的轴的旋转和围绕平行于z轴的轴的旋转的控制或驱动。另外,位置是可以基于x轴、y轴和z轴上的坐标而指定的信息,并且取向是可以通过θx轴、θy轴和θz轴上的值而指定的信息。定位是指控制位置和/或取向。对准可以包括控制基板5和模具3中的至少一者的位置和/或取向,从而减少基板5的压射区域与模具3的图案区域之间的对准误差(叠对误差)。另外,对准可以包括用于校正或改变基板5的压射区域和模具3的图案区域中的至少一者的形状的控制。
29.压印装置1可以包括例如固化单元2、压印头4、基板定位机构30、分配器7、模具输送机构11、基板输送机构12、ttm(通过掩模,through the mask)观测仪(scope)13和控制器10。另外,压印装置1可以包括模具高度传感器9和基板高度传感器(测量设备)8。
30.固化单元2通过经由模具3用固化能量(例如,诸如紫外光的光)17照射压印材料14来固化布置于基板5上的压印材料14。压印头4是保持和驱动模具3的模具驱动机构。模具3包括图案区域,并且在该图案区域中形成要转印到基板5上的压印材料14上的图案。压印头4可以被形成为围绕多个轴(例如,包括z轴、θx轴和θy轴的三个轴,以及更优选地包括x轴、y轴、z轴、θx轴、θy轴和θz轴的六个轴)来驱动模具3。围绕θx轴和θy轴的驱动表示对模具3或其图案区域的倾斜度的控制。
31.ttm观测仪13可以布置于压印头4上。ttm观测仪13可以被形成为观察或测量布置于基板5上的对准标记和形成在模具3上的对准标记。ttm观测仪13可以包括例如光学系统和摄像系统。ttm观测仪13可以测量基板5的压射区域与模具3(的图案区域)之间的对准误差(例如,在x方向和y方向上的偏移量)。
32.基板定位机构30可以包括保持基板5的基板台6和驱动基板台6的台驱动机构19。基板台6可以由台驱动机构19围绕多个轴(例如,包括z轴、θx轴和θy轴的三个轴,以及更优选地包括x轴、y轴、z轴、θx轴、θy轴和θz轴的六个轴)驱动。结果,可以围绕多个轴驱动或定位基板5。
33.基板台6可以包含用于测量模具3的图案区域的高度或倾斜度的模具高度传感器
9。可以在沿着x-y平面驱动基板台6的同时,通过模具高度传感器9来测量模具3(的图案区域)的多个测量点的各个的高度,并且可以基于获得的测量结果来测量模具3(的图案区域)的倾斜度或形状。基板台6可以由台驱动机构19沿着台板15驱动。台板15可以由台板支架(mount)16支撑,以隔离来自地板的振动。在图1示出的布置示例的压印装置1中,除了台板15之外,固化单元2、压印头4、分配器7、基板高度传感器8等也由台板支架16支撑。
34.基板高度传感器8可以用于测量基板5的表面的高度分布或形状。可以在基板台6在x-y方向上被驱动的同时,通过基板高度传感器8来测量基板5的多个测量点中的各个的高度,并且可以基于获得的测量结果来测量基板5的表面的高度分布或形状。
35.分配器7可以被形成为将未固化的压印材料14供应或布置到基板5上。模具输送机构11可以将模具3输送到压印头4并将模具3从压印头4输送。基板输送机构12可以将基板5输送到基板台6并将基板5从基板台6输送。控制器10可以例如由诸如fpga(现场可编程门阵列的缩写)的pld(可编程逻辑器件的缩写)、asic(专用集成电路的缩写)、嵌入有程序的通用计算机或者这些组件的全部或部分的组合形成。控制器10可以被形成为控制固化单元2、压印头4、基板定位机构30、分配器7、模具输送机构11、基板输送机构12和ttm观测仪13。
36.下面将参照图3和图4来描述由压印装置1执行的图案形成作业。控制器10控制图案形成作业的执行。图案形成作业包括对至少一个基板5进行的处理。对各基板5的处理包括多个压印处理,并且各压印处理可以包括用于在从基板5上的多个压射区域选择的压射区域上形成图案的处理。图3示出了图案形成作业的过程的流程图。图4示意性地示出了在图案形成作业期间的压印装置的状态的变化。表示图4所示处理的附图标记对应于表示图3所示处理的附图标记。
37.首先,在步骤s101的处理中,模具3由模具输送机构11输送到压印头4,并由压印头4保持。在步骤s102中,基板高度传感器(测量设备)8用于测量模具3的图案区域的倾斜度。通过基于至少两个具有不同x坐标值的测量点和至少两个具有不同y坐标值的测量点来测量模具3的图案区域的高度,将可以测量相对于θx轴的倾斜度和相对于θy轴的倾斜度。为了通过平均效应提高测量精度或者为了测量二次曲面或更高次曲面,可以通过测量具有不同x坐标值的三个至五个测量点和具有不同y坐标值的三个至五个测量点来测量模具3的图案区域的高度。测量点的数量可以根据吞吐量和测量精度来确定。
38.接下来,在步骤s103中,基板5可以由基板输送机构12输送到基板台6,并由基板台6保持。接下来,在步骤s104中,基板高度传感器(测量设备)8可以用于测量基板5的表面的形状。为了通过线性函数(即平面)来近似基板5的表面,需要通过测量至少三个不排列在单列中的测量点来测量基板5的表面的高度。为了基于平均效应来提高测量精度,优选的是,通过测量五个至七个测量点来测量基板5的表面的高度。为了通过二次函数来近似基板5的表面,需要通过测量甚至更多的测量点来测量基板5的表面。请注意,模具3被输送到压印头4的定时和基板5被输送到基板台6的定时分别在执行步骤s102和步骤s104的处理之前就足够了。
39.在步骤s105中,控制器10可以计算或确定从基板5的多个压射区域中选择的压射区域的倾斜度和/或高度,该压射区域即为之后将立即在其中形成图案的压射区域(在下文中称为“待处理压射区域”)。待处理压射区域的倾斜度是基于相对于θx轴的倾斜度和相对于θy轴的倾斜度的倾斜度。可以基于基板5上的待处理压射区域的位置和在步骤s104的处
理中测量的基板5的表面的形状来计算或确定待处理压射区域的倾斜度。稍后将详细描述该处理。
40.在步骤s106中,基板5与模具3之间的相对取向可以由基板定位机构30和/或压印头4根据在步骤s105中计算或确定的倾斜度控制,从而使得待处理压射区域将与模具3的图案区域平行。在一个示例中,压印头4可以控制模具3的倾斜度,从而使得待处理压射区域将与模具3的图案区域平行。这里可应用日本专利第6497938号中公开的技术来控制待处理压射区域与模具3的图案区域之间的相对取向。在另一示例中,基板定位机构30可以控制基板5的倾斜度,从而使得待处理压射区域将与模具3的图案区域平行。而且,在步骤s106中,基板5与模具3之间的相对位置可以由基板定位机构30和/或压印头4根据在步骤s105中计算的高度来控制,从而使得待处理压射区域与模具3的图案区域之间的间隔将成为目标间隔。
41.在步骤s107中,分配器7可以将压印材料14布置于待处理压射区域上。请注意,压印材料14可以由分配器7连续地施加到多个压射区域上,并且如果在步骤s107中确定压印材料14已经被布置于待处理压射区域上,则跳过步骤s107的处理。在步骤s108中,控制压印头4和/或基板定位机构30以将待处理压射区域上的压印材料14与模具3的图案区域彼此接触。在步骤s108中,可以使用ttm观测仪13以将模具3与待处理压射区域对准。此外,在步骤s108中,在模具3的图案区域的凹部以及图案区域与待处理压射区域之间的空间已经被压印材料14填充之后,固化单元2将用固化能量照射待处理压射区域上的压印材料。结果,模具3的图案区域的图案将被转印到压印材料14上,并且由压印材料14的固化产物制成的图案被形成在待处理压射区域上。在步骤s109中,控制压印头4和/或基板定位机构30,以将模具3的图案区域与待处理压射区域上的固化的压印材料14彼此分离。
42.在步骤s110中,控制器10确定是否已针对基板5的所有压射区域完成压印处理。如果存在尚未经过压印处理的剩余压射区域,则控制器10将从这些压射区域中选择新的待处理压射区域,并对该待处理压射区域执行步骤s105至s109的处理。另一方面,如果不存在尚未经过压印处理的剩余压射区域,则控制器10将在步骤s111中确定是否已完成对形成该批次的所有基板的处理。如果确定尚未完成对所有基板的处理,则控制器10将执行步骤s103至s109的处理,以处理下一个基板。
43.作为通过任意阶的函数来近似基板5的表面的形状的示例,将在下文中描述基板5的表面的形状通过二次函数(二次曲面)来近似的示例。
44.二次函数(二次曲面)可以被表达为
45.wz=dz+dx
·
x+dy
·
x+dxx
·
x2+dxy
·
x
·
y+dyy
·
y2...(1)
46.其中,(x,y)是指示基板5上的位置的坐标,wz是基板5的表面在(x,y)处的高度,dz是零阶系数,dx和dy是一阶系数,dxx、dxy和dyy是二阶系数。以这种方式,二次函数被表达为包括六个系数的多项式。为了确定这六个系数,需要通过测量至少六个测量点来测量基板5的表面的高度。然而,为了提高各系数的精度,优选的是,通过测量多于六个测量点并使用最小二乘法来测量基板5的表面的高度。
47.为了更严格地指定基板5的表面的形状,优选的是,通过诸如三次函数或四次函数的更高阶函数来近似形状。如果要通过三次函数来近似形状,则需要确定十个系数,因此至少需要十个测量点。以类似的方式,如果要通过四次函数来近似形状,则需要确定15个系数,因此至少需要15个测量点。在这些情况下,也可以测量更多的测量点以使用最小二乘
法。由于需要通过以这种方式测量更多的测量点来测量基板5的表面的高度,以精确地指定基板5的表面的形状,因此吞吐量会降低。
48.下面将描述根据近似基板5的表面的形状的近似函数(曲面)获得待处理压射区域的倾斜度的方法。尽管这里将描述近似基板5的表面的形状的函数由式(1)(即,二次函数)表达的示例,但是用于近似基板5的表面的形状的函数的阶数可以是其它阶。
49.为了根据近似基板5的表面的形状的近似函数获得待处理压射区域的倾斜度,可以获得该近似函数的切线的倾斜度,即该近似函数的偏导数。令(x,y)为待处理压射区域中心位置的坐标,则相对于θy轴的倾斜度和相对于θx轴的倾斜度分别由下式给出:
[0050][0051][0052]
另外,由下式给出待处理压射区域的中心位置处的高度:
[0053]
高度=dz+dx
·
x+dy
·
y+dxx
·
x2+dxy
·
x
·
y+dyy
·
y2...(4)
[0054]
请注意,为了通过使用待处理压射区域中的多个测量点中的各测量点处的高度的测量结果来获得待处理压射区域的高度和倾斜度,通过最小二乘近似获得线性平面(线性函数),从而获得
[0055]
wz=dz+dx
·
x+dy
·
y...(5)
[0056]
并计算出
[0057]
相对于θy轴的倾斜度=dx...(6)
[0058]
相对于θx轴的倾斜度=dy...(7)
[0059]
高度=dz+dx
·
x+dy
·
y...(8)
[0060]
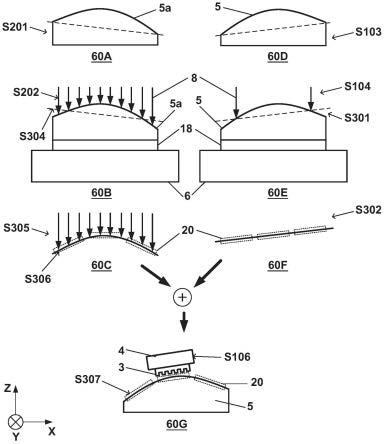
将在下文中参照图5和图6描述第一实施例。图5示出了图3的流程图的步骤s105的处理的过程(待处理压射区域的测量处理)。图5还示出了在图3的流程图所示的处理之前要执行的处理的过程(对前一基板的测量处理)。图6示意性地示出了图5的流程图的主要处理。图6所示的处理的附图标记对应于图5所示的处理的附图标记。
[0061]
基板5的表面可以具有例如可以通过二阶或更高阶(三阶或更高阶)函数近似的弯曲形状。例如,二阶或更高阶的高阶分量可以是形成同一批次的多个基板5当中的共同分量。这是由于属于同一批次的基板5经过相同处理。另一方面,在形成同一批次的多个基板5当中,零阶(高度)和一阶(倾斜度)分量倾向于变化。这可能是由于基板台6上的各基板5的布置误差等导致的。
[0062]
例如,前一基板5a是一批次的第一基板,并且待处理基板5可以是该批次的第二基板或后续基板。首先将描述对前一基板5a的测量。对前一基板5a的测量处理可以包括步骤s201至s204的处理。如果前一基板5a是该批次的第一基板,则在图3所示的流程图的步骤s103中执行步骤s201的处理,并且可以在步骤s104中执行步骤s203和s204的处理。另外,可以在步骤s105中执行步骤s204的处理。
[0063]
在步骤s201中,前一基板(第一基板)5a可以由基板输送机构12输送到基板台6,并由基板台6保持。接下来,在步骤s202中,基板高度传感器8用于测量前一基板5a的表面的形状。更具体地,在步骤s202中,基板高度传感器8可以用于通过测量多个(第一数量的)测量点来测量前一基板5a的表面的高度。结果,控制器10可以获得指示前一基板5a的表面的高
度分布的第一高度分布信息。该状态在示意图60b中示意性地示出。在此,可以根据用于近似前一基板5a的表面的形状的近似函数的阶数来确定测量点的数量(第一数量)。在步骤s203中,控制器10可以将在步骤s202中获得的测量结果存储在存储设备中。在步骤s204中,控制器10可以基于在步骤s203中存储的测量结果来计算待处理压射区域的倾斜度。
[0064]
接下来将描述对待处理基板5的测量。首先,在图3的步骤s104的处理中,基板高度传感器8可以用于测量待处理基板5(第二基板)的表面的形状。更具体地,在步骤s104中,基板高度传感器(测量设备)8可以用于通过测量多个(第二数量的)测量点来测量待处理基板5的表面的高度。该状态在示意图60e中示意性地示出。结果,控制器10可以获得指示待处理基板5的表面的高度分布的第二高度分布信息。通常,用于测量待处理基板5(第二基板)的表面的高度的测量点的数量(第二数量)小于用于测量前一基板(第一基板)5a的表面的高度的测量点的数量(第一数量)。
[0065]
接下来,在步骤s301中,控制器10基于在步骤s104中获得的第二高度分布信息来确定第二分量,该第二分量是用于近似待处理基板5的表面的形状的第二预定阶或更低阶的近似函数。这里,虽然作为第二预定阶或更低阶的近似函数的第二分量可以是例如二阶或更低阶或更低阶的分量、一阶分量或零阶分量,但不限于对此。请注意,考虑到测量精度与吞吐量之间的平衡,优选的是,将二次函数设置为第二分量。
[0066]
在示意图60e中以虚线示例性地表示第二分量,该第二分量是用于近似待处理基板5的表面的形状的第二预定阶或更低阶的近似函数。可以根据在步骤s301中确定的近似函数(第二分量)的阶数来确定步骤s104的处理中的测量点的数量(第二数量)。例如,如果近似函数(第二分量)是表示线性平面的线性函数,则将至少需要三个不在一条直线上的测量点,并且可以设置四个或五个测量点,以减少测量误差。可以基于在步骤s104中获得的第二高度分布信息,通过例如最小二乘法来确定近似函数(第二分量)。
[0067]
在步骤s302中,控制器10基于在步骤s301中确定的近似函数(第二分量)和待处理基板5的待处理压射区域的位置,来获得待处理压射区域的第二倾斜度分量(基于第二分量的倾斜度)。这里,如果如示意图60e的示例那样,用于近似待处理基板5的表面的形状的近似函数(第二分量)是线性平面(线性函数),则无论压射区域的位置如何,第二倾斜分量将是相同的。如果用于近似待处理基板5的表面的形状的近似函数(第二分量)是二次曲面(二次函数),则可以通过使用式(2)和(3)来计算压射区域的第二倾斜度分量。示意图60f示意性地示出了待处理基板5上的待处理压射区域的第二倾斜度分量。
[0068]
接下来,在步骤s303中,控制器10读出在步骤s203中存储的前一基板5a的第一高度分布信息。在步骤s304中,控制器10基于在步骤s303中读出的第一高度分布信息来确定第一分量,该第一分量是用于近似前一基板5a的表面的形状的第一预定阶或更低阶的近似函数。优选的是,用于近似前一基板(第一基板)5a的表面的形状的近似函数(第一分量)的阶数,与在步骤s301中确定的、用于近似待处理基板5(第二基板)的表面的形状的近似函数(第二分量)的阶数相同。换句话说,优选的是,第二预定阶与第一预定阶相同。然而,如果存在对于确定待处理压射区域的倾斜度不需要的阶,则第二预定阶可以不同于第一预定阶。
[0069]
在示意图60b的示例中,用于近似前一基板(第一基板)5a的表面的形状的第一预定阶或更低阶的近似函数(第一分量)是线性函数(线性平面)并用虚线表示。用于近似前一基板(第一基板)5a的表面的形状的近似函数可以基于所有的第一高度分布信息(即,每个
测量点的高度信息)来获得,或者可以基于如示意图60e所示的相同测量点的高度信息来获得。如果要从每个测量点的高度信息获得线性平面,则近似函数可以通过使用二次曲面来计算而不是通过使用线性平面的近似来计算,并使用从该近似函数获得的零阶和一阶项或系数。换句话说,控制器10可以通过从如下的近似函数提取第一预定阶或更低阶的分量来获得第一预定阶或更低阶的分量,该近似函数近似指示前一基板5a的表面的高度分布的第一高度分布信息。
[0070]
在步骤s305中,控制器10通过去除在步骤s304中从第一高度分布信息确定的第一预定阶或更低阶的近似函数的分量(第一分量)来生成校正后的高度分布信息。这也可以理解为从第一高度分布信息提取超过第一预定阶的阶的分量。在示意图60c中示意性地示出了超过第一预定阶的阶的分量。
[0071]
在图6所示的示例中,为了便于描述,示意图60a所示的前一基板5a的第一分量的附图标记与示意图60d所示的基板5的附图标记相反。因此,在步骤s305中,如果未从前一基板5a的第一高度分布信息中去除线性分量,则示意图60a的线性分量与示意图60d的线性分量将相互抵消。结果,线性分量将为零,并且将仅计算二次分量。准确地说,需要再现示意图60d的形状。因此,需要步骤s305的处理,并且从前一基板5a的第一高度分布信息去除第一预定阶或更低阶的分量(第一分量)。
[0072]
在步骤s306中,控制器10基于校正后的高度分布信息和布置于与待处理基板5的待处理压射区域相同的位置处的压射区域的位置,来获得待处理基板5的待处理压射区域的第一倾斜度分量(基于第一分量的倾斜度)。这可以基于如下函数和压射区域中心的坐标来计算,所述函数是通过部分地导出用于近似校正后的高度分布信息的近似函数而获得的。更优选地,在步骤s202中,将以精细间距进行测量,以在压射区域中包括多个测量点,并通过使用压射区域中包括的多个测量点的测量值,使用线性平面来在步骤s306中近似压射区域。这正如式(6)和(7)所示。由于在示意图60c所示的示例中,压射区域中也包括至少两个测量点,因此可以使用这些测量点来进行线性近似。在示意图60c中例示了三个压射区域中的各压射区域的倾斜度。请注意,示意图60c仅仅是概念图。由于各压射区域相对于基板5a足够小,因此即使通过使用线性平面来近似压射区域,在精度方面也没有问题。
[0073]
在步骤s307中,控制器10根据压射区域的第一倾斜分量和待处理压射区域的第二倾斜分量,来获得待处理压射区域的倾斜度,该压射区域的第一倾斜分量在步骤s306中根据前一基板5a的测量结果获得,该待处理压射区域的第二倾斜分量在步骤s302中根据待处理基板5的测量结果获得。更具体地,控制器10通过将根据前一基板5a的测量结果获得的压射区域的第一倾斜分量与根据待处理基板5的测量结果获得的待处理压射区域的第二倾斜分量相加,来获得待处理压射区域的倾斜度。在示意图60g中示意性地示出以这种方式获得的待处理压射区域的倾斜度。
[0074]
图6仅仅是为了便于理解该过程的简化示例,并且本发明不限于这样的示例。可以任意设置第一预定阶和第二预定阶。例如,在步骤s202中的前一基板表面的高度测量中,可以以小于示意图60b所示的压射区域的尺寸的间距进行测量,以允许前一基板的表面由包含三次分量、四次分量或五阶或更高阶分量的曲面近似。另外,在步骤s104中对待处理基板表面的高度测量中,对待处理基板的多于六个的测量点进行测量,将会允许在步骤s301中通过二次曲面近似待处理基板表面的形状。在这种情况下,可以在步骤s305中从前一基板
的测量值去除二次曲面分量(零阶、一阶和二阶系数)。以类似的方式,通过在步骤s104中测量多于十个的测量点,可以在步骤s301中使用三次曲面来近似待处理基板的表面的形状。在这种情况下,可以在步骤s305中从前一基板的测量值去除三次曲面分量(零阶、一阶、二阶和三阶系数)。由于在步骤s104中增加测量点会降低吞吐量,因此优选的是,在一般用途中,在步骤s104中将测量点的数量设置为六个或七个,并在步骤s301中进行最高二次曲面的函数近似。如上所述,由于在步骤s202中对前一基板的测量不会影响吞吐量,因此优选的是,根据小于压射区域尺寸的间距来测量测量点,即,在理想情况下,网格具有1至几毫米的间距,并足够覆盖高阶分量。
[0075]
在步骤s202中要测量的前一基板不必是与待处理基板属于同一批次的第一基板,而也可以是属于同一批次的多个基板。在这种情况下,可以测量多个基板,并且可以使用获得的测量值的平均值。另外,如果要在多个基板上连续执行压印处理,则可以通过将第一基板中的至少一个设置为前一基板来执行步骤s202的处理。
[0076]
图5所示的处理仅仅是示例,可以在不矛盾的范围内切换处理的顺序。例如,由于不必对每个压射区域进行步骤s301、s303、s304和s305的处理,因此这些处理可以作为步骤s104的处理的一部分进行,或者在步骤s104之后立即进行。另外,如果预先知道所有压射区域的坐标值,则可以在步骤s104的处理之后立即计算每个压射区域的倾斜度并将其存储在存储设备中,并且从存储设备中检索到的倾斜度可以用于步骤s106。
[0077]
此外,在步骤s203中要存储在存储设备中的信息不限于前一基板5a的测量值。该信息可以是通过在步骤s305中去除近似函数分量而获得的结果,或者该信息可以在计算要在步骤s306中计算的所有倾斜度值之后存储在存储设备中。然而,更通常地,在图6的步骤s202中获得的信息可以在步骤s203中存储在存储设备中。
[0078]
第一实施例的操作可以总结如下。
[0079]
控制器10获得指示第一基板(前一基板5a)的表面的高度分布的第一高度分布信息(步骤s303)。
[0080]
控制器10使用基板高度传感器(测量设备)8来获得指示第二基板(基板5)的表面的高度分布的第二高度分布信息(步骤s104)。
[0081]
控制器10通过从第一高度分布信息中去除第一分量来获得校正后的高度分布信息,该第一分量是用于近似第一高度分布信息的第一预定阶或更低阶的近似函数(步骤s304和步骤s305)。
[0082]
控制器10基于第二分量和校正后的高度分布信息来控制压印处理,该第二分量是用于近似第二高度分布信息的第二预定阶或更低阶的近似函数(步骤s301、s302、s306、s307和s106)。
[0083]
在下文中将描述第二实施例。在第一实施例中,可以将在该批次开始处的基板中的至少一个基板用作前一基板(第一基板)。在第二实施例中,超平坦基板5b被用作前一基板(第一基板)。超平坦基板5b是平坦度高于待处理基板5的平坦度的基板。当与压印装置1有关的因素(例如,基板卡盘18的形状和作为基板台6的移动基准的台板15的形状分量)比待处理基板5的表面形状影响更大时,第二实施例是有利的。图7示出了基板卡盘18的夹持面的形状包含大的二次分量的示例。尽管在图7中以夸张的方式示出了基板卡盘18的夹持面的形状,但是难以精确地使基板卡盘的整个夹持面平坦化,该夹持面例如延伸到φ300毫
米。因此,夹持面至少可以具有这种分量。
[0084]
示意图70b示意性地示出了如下状态,其中,基板卡盘18的夹持面包括二次分量并且超平坦基板5b已经被夹持到夹持面。由于超平坦基板5b的形状遵循基板卡盘18的夹持面的形状,因此超平坦基板5b的表面的形状也包括二次分量。示意图70e示意性地示出了待处理基板5已经被夹持到同一基板卡盘18的夹持面的状态。如示意图70d中示意性地示出的,待处理基板5的线性分量可以与示意图70a中示出的超平坦基板5b的线性分量不同。
[0085]
在本示例中,用于精确获得压射区域倾斜度的方法与图5的流程图所示的方法相同。示意图70a的超平坦基板5b可以被设置为前一基板,并且可以在步骤s202中测量表面的形状。结果,例如,如示意图70b中示意性地示出的,可以测量二次曲面的形状。示意图70d的待处理基板5也可以根据图5的流程图的过程在步骤s104中测量。这里,例如,如示意图70e中示意性地示出的,可以进行测量以测量线性分量。
[0086]
在步骤s304和步骤s305的处理中,从作为前一基板的超平坦基板5b表面的高度分布信息中去除该表面的线性分量。请注意,在示意图70b中示出了不存在线性分量的示例。然而,由于在步骤s305中将去除一阶和更低阶的分量,因此即使存在线性分量并且最终将使用示意图70e中示意性地示出的线性分量,也将不会造成问题。在示意图70c中示意性地示出了通过从示意图70b的高度分布信息中去除一阶和更低阶的分量而获得的结果,并且可以在步骤s306中从该结果获得压射区域的第一倾斜度分量。
[0087]
在步骤s301中,根据示意图70e中示意性示出的高度分布信息计算一阶或更低阶的分量。该结果在示意图70f中示意性地示出。在步骤s302中,从在步骤s301中计算的一阶或更低阶的分量获得待处理压射区域的第二倾斜度分量。在步骤s307中,将在步骤s306中获得的第一倾斜度分量与在步骤s302中获得的第二倾斜度分量相加,以获得待处理压射区域的倾斜度。该结果在示意图70g中示意性地示出。
[0088]
即,执行与第一实施例类似的处理将使得可以精确地获得压射区域的倾斜度作为结果。与第一实施例的不同之处在于,第一倾斜分量是取决于前一基板5a的表面的形状还是取决于基板卡盘18的表面的形状。尽管通常通过使用基板高度传感器8来测量包括两个元素的表面的形状,但是也可以根据图5的流程图的过程精确地测量待处理基板的待处理压射区域的倾斜度,而无需考虑这一事实。
[0089]
在压印装置1的调整期间,基本上只需要执行一次用于测量作为与压印装置1相关的因素的高阶分量的从步骤s201到步骤s203的处理。可选地,可以在基板卡盘18要被更换时或在压印装置1的维护期间执行这些处理。如果在第一实施例中发生批次切换,则需要对前一基板再次执行从步骤s201到步骤s203的处理。然而,只要将进行不需要考虑压射区域的倾斜度的处理,仅执行第二实施例就足够了。如果要根据批次交替地执行第一实施例和第二实施例,则可以布置用于存储步骤s203中的结果的多个存储区域,并且可以根据各批次切换存储区域。
[0090]
在下文中将描述第三实施例。基本上只需要对各单个批次执行一次步骤s201至步骤s203的处理。然而,如果从执行步骤s201至步骤s203的处理开始已经过去很长时间,则待处理基板5的表面的形状可能已经从前一基板5a的表面的形状发生了变化。在这种情况下,可以再次执行步骤s201至步骤s203的处理。然而,执行步骤s202的处理将需要相应的时间量。
[0091]
因此,可以在步骤s104中仅增加例如第一待处理基板5的测量点的数量。例如,虽然通常通过设置三个测量点就可以测量零阶分量和线性分量,但是通过针对至少第一待处理基板5设置六个测量点将测量最高二次分量的分量。随后,二次分量的系数(对应于式(1)的dxx、dxy和dyy)还将用于后续待处理基板5。结果,将可以精确地确定待处理压射区域的倾斜度,而不会降低第二和后续待处理基板5的吞吐量。在这种情况下,在步骤s305中,将从前一基板5a的测量值中去除二阶或更低阶的分量(零阶、线性和二次分量)。结果,将在步骤s202中对前一基板5a的测量中获得三阶或更高阶的高阶分量,将通过使用第一待处理基板5获得二次分量,并且将在对下一待处理基板5的压印处理期间获得零阶分量和线性分量。
[0092]
这种操作可以总结如下。
[0093]
控制器10获得指示第一基板(前一基板5a)的表面的高度分布的第一高度分布信息(步骤s303)。
[0094]
控制器10使用基板高度传感器(测量设备)8来获得指示第二基板(多个基板5中的至少一个)的表面的高度分布的第二高度分布信息(步骤s104)。
[0095]
控制器10使用基板高度传感器(测量设备)8来获得第三基板(多个待处理基板5中的下一待处理基板5)的表面的高度分布的第三高度分布信息(步骤s104)。
[0096]
控制器10获得用于近似第二高度分布信息的第二分量(包括第二预定阶或更低阶的分量以及阶数高于第三预定阶的分量,该第三预定阶低于第二预定阶)(步骤s301)。
[0097]
控制器10获得用于近似第三高度分布信息的第三分量(第三预定阶或更低阶的函数)(步骤s301、s302、s304、s305、s306、s307和s106)。
[0098]
另外,控制器10可以针对近似函数的各系数确定是否从第一待处理基板5继承该系数。例如,考虑这样一种情况:将dxy假设为在各待处理基板中几乎没有变化的系数,而将dxx和dyy假设为针对各待处理基板确定的系数。在这种情况下,二阶系数dxx、dxy和dyy都将通过针对第一待处理基板设置六个测量点来计算。随后,针对第二待处理基板,将仅设置五个测量点,从而使得仅针对dxy继承在第一待处理基板的处理中确定的值,并且dxx和dyy的值将根据获得的测量值重新计算。
[0099]
由于系数的阶数越高越容易受到测量误差的影响,因此通常优选的是增加测量点的数量并使用最小二乘法。也就是说,即使在第二和后续待处理基板中的各个中存在五个或六个测量点的情况下,也可能存在故意不计算二阶系数的情况。也就是说,可以将第一待处理基板设置为具有大约七个到十个测量点,可以精确地获得对应的系数,并且第一待处理基板的二阶系数dxx、dxy和dyy可以由第二和后续待处理基板中的各个继承。对于第二和后续待处理基板中的各个,可以通过使用最小二乘法根据五个到六个测量点仅计算线性分量。由于使用这样的方法将难以受到来自基板高度传感器8的测量误差的影响,因此可以有望提高精度。
[0100]
测量点数量的增加不必受限于第一待处理基板,并且可以针对多个基板增加或者可以针对每n(n是2或更大的整数)个待处理基板增加。
[0101]
在下文中将描述第四实施例。通常,在进行压印处理之前,可以通过使用对准仪(未示出)进行用于测量基板5上的多个压射区域的布置(压射布局)的预对准。对准仪(alignment scope)可以具有比图1的ttm观测仪13更宽的视场。结果,即使在将基板5放置在基板台6上时发生布置误差,也可以在对准仪的视场内补充布置于基板中的标记。在预对
准中,通常,可以测量多个标记的位置,并且可以通过函数近似来计算压射布局。
[0102]
图8示出了预对准的概念图。基板5的多个压射区域,更具体地,在本示例中为六个压射区域已经被选择为要测量的压射区域23。通过在该对准仪附近布置基板高度传感器8,将可以与预对准并行地由基板高度传感器8执行测量(步骤s104的处理),从而有利地提高吞吐量。虽然对准仪将需要测量在基板上布置的对准标记,但是基板高度传感器8基本上可以在任何地方进行测量,只要反射面(即,基板)存在于要测量的位置就没有问题。
[0103]
增加步骤s104中测量点的数量将需要增加用于预对准测量的测量点的数量。由于预对准测量包括通过摄像元件进行的摄像、图像处理等,因此其基本上需要相应量的处理时间。因此,增加测量点会导致吞吐量下降。
[0104]
如上所述,要由基板高度传感器8测量的位置可以是基板5的表面内的任何位置。因此,通过在从一个预对准测量点移动到下一个预对准测量点期间由基板高度传感器8进行测量,将可以增加用于高度测量的测量点的数量。然而,如果在基板台6加速或减速的同时进行测量,则测量可能会受到基板台6的倾斜度或高度变化的影响。因此,优选地,在基板台6以恒定速度移动的区间中或在速度从加速转变为减速的瞬间由基板高度传感器8执行测量。通常,这样的附加测量点可以是一组预对准测量点之间的中点。这样的附加测量点24如图8所示。在本示例中,存在用于与预对准同时测量高度的六个测量点(同时测量点),并且在一个同时测量点至另一个同时测量点之间的移动期间要测量五个高度测量点。这些测量值可以用于通过例如三次函数的高阶函数进行近似,或者用于在计算二阶系数期间通过使用最小二乘法来提高系数的计算精度。
[0105]
请注意,基于在步骤s202中获得的测量值对前一基板5a的高阶分量的计算类似于在第一实施例和第二实施例中进行的那些计算。
[0106]
已经经历各种处理的基板5的表面的形状倾向于具有较高周边部分的形状,即,四次形状。图9示意性地示出了具有四次形状的基板5。即使在基板5具有这样的形状的情况下,也可以适当地设置步骤s202的处理中的测量点的间距和测量范围,以基于在第一实施例中的前一基板5a的测量来确定高阶分量。
[0107]
然而,通常,甚至这些高阶分量也可以针对各基板略微变化。在正常的压印处理中,这种程度的差异在大多数情况下可能不会有问题。然而,取决于要转印到压印材料上的图案,即使高阶分量的微小变化也可能对压印结果产生不可忽视的影响。
[0108]
虽然以第四实施例的方式,也可以通过增加测量点来计算高阶系数,但是四阶系数将需要至少15个测量点,实际上,当使用最小二乘法时,甚至考虑更多的点。此外,测量点将需要被布置于基板的周边部分。通常,预对准测量点被布置为避开基板的外围部分。在这种情况下,将难以应对第四实施例。
[0109]
如上所述,可以在基板台6移动期间进行由基板高度传感器8进行的测量。因此,基板台6和基板高度传感器8可以被控制,从而使得在移动基板台6的同时,将沿着基板5的直径方向从基板5的一端到另一端测量基板5的表面的高度。例如,如图10所示,可以针对x方向和y方向中的各方向对列进行测量。在本示例中,可以设置15个或更多个测量点。然而,由于测量点布置于单列中,因此无法计算出四次曲面的所有系数。通过本测量方法不能计算的系数可以根据步骤s202的测量结果获得。当压射区域的倾斜度的测量精度要求严格时,可以对每个基板进行图10中例示的测量。结果,在将吞吐量劣化抑制到最小限度的同时,将
可以更精确地执行测量。这里举出的测量示例仅仅是示例,本发明不限于此。例如,可以考虑各种情况,例如仅在x方向上进行测量的情况、仅在y方向上进行测量的情况、也在对角线方向上进行测量的情况等。
[0110]
在下文中将描述第六实施例。可以在与压印装置1分开的其它装置中执行图5所示的步骤s201至步骤s203的处理。然而,如果测量前一基板的装置与压印装置1不同,则可能会对压射区域的倾斜度的确定产生负面影响。图11示意性地示出失败示例。假设其它装置的基板卡盘18a的形状为如示意图110b所示的二次形状,并且压印装置1的基板卡盘18的形状为如示意图110e所示的线性形状。在这种情况下,如果执行根据图5的流程图的处理,则在步骤s307中获得的压射区域的倾斜度将是已经受到其它装置的基板卡盘18a的二次形状影响的倾斜度值。在图11的示例中,实际需要获得的压射区域的倾斜度为示意图110f所示的倾斜度。
[0111]
当要在同一装置中执行步骤s202中执行的针对前一基板5a的处理和步骤s104中执行的针对待处理基板5的处理时,如图7所示,即使基板卡盘18具有二次形状,也可以毫无问题地计算压射区域的倾斜度。这是因为由基板卡盘18的夹持面的形状导致的分量,将在步骤s202中执行的针对前一基板5a的处理和步骤s104中执行的针对待处理基板5的处理中相同。
[0112]
因此,当要在与压印装置1分离的其它装置中测量前一基板5a的表面的形状时,装置因素,例如,其它装置的基板卡盘18a的形状与压印装置1的基板卡盘18的形状之间的差异,可以预先测量,并反映在压射区域的倾斜度计算中。图12示出了根据第六实施例的校准处理过程的流程图。图13示意性地示出了校准处理的主要处理。基本概念是,将由其它装置和压印装置1两者测量同一基板5的表面的形状,并且测量结果之间的差异将被计算为装置因素,即,作为各个基板卡盘的形状之间的差异。
[0113]
在图12的步骤s401中,基板5被输送到其它装置并由基板卡盘18a保持。尽管在这种情况下基板5可以是任何种类的基板,但优选地使用超平坦基板。在步骤s402中,以与步骤s202的处理类似的方式测量基板5的表面的形状。这对应于示意图130b,并且获得如示意图130c所示的测量结果。在步骤s403中,以与步骤s203的处理类似的方式,将测量结果存储在存储设备中。
[0114]
同一基板5的表面的形状也在压印装置1中测量。在步骤s501中,在步骤s402中使用的基板5被输送到压印装置1并由基板卡盘18保持。在步骤s502中,基板高度传感器8用于测量基板5的表面的形状。这对应于示意图130e,并且获得如示意图130f所示的测量结果。这里,优选的是,在步骤s502中执行的测量中的测量点的布置与在步骤s402中执行的测量中的测量点的布置相同。由于图12所示的处理仅在引入其它装置时或在更换其它装置或压印装置的基板卡盘时执行就足够了,因此不必考虑吞吐量。
[0115]
在步骤s503中,由其它装置测量并在步骤s403中存储在存储设备中的基板5的表面的形状的测量结果(示意图130c)被从压印装置1的存储设备中读出。在步骤s504中,计算在步骤s402中获得的测量结果与在步骤s502中获得的测量结果之间的差。这里,由于步骤s402的处理中的测量点和步骤s502的处理中的测量点处于基板5上的相同位置,因此计算相同测量点的测量值之间的差就足够了。该差的结果在示意图130g中示出并且在步骤s505中存储在存储设备中。如果存在多个其它装置,则可以相应地准备多个存储区域。
[0116]
请注意,尽管已经描述了步骤s402中的测量点和步骤s502中的测量点优选地被布置于相同的位置,但是这些测量点的位置还优选地与步骤s202中的测量点的位置相同。然而,本发明不限于此。如果测量点的位置不同,则计算步骤s402中的多个测量点与步骤s502中的多个测量点当中位置彼此靠近的测量点的测量值之间的差就足够了。如果不能容忍各个测量点的位置之间的差,则可以计算根据步骤s402的测量结果获得的基板表面形状的近似函数与根据步骤s502的测量结果获得的基板表面形状的近似函数之间的差。
[0117]
接下来将参照图14描述通过使用通过图12的流程图的处理获得的差来控制压印处理的方法。图14示出了代替根据第一实施例的图5流程图所示的处理的要执行的处理。图15示意性地示出了压印装置1状态的变化。表示图15所示的处理的附图标记对应于表示图14所示的处理的附图标记。
[0118]
在步骤s601中,前一基板(第一基板)5a可以由基板输送机构12输送到其它装置的基板卡盘18a,并由基板卡盘18a保持。在步骤s602中,其它装置的基板高度传感器可以用于通过测量多个(第一数量的)测量点来测量前一基板5a的表面的高度。结果,可以获得指示前一基板5a的表面的高度分布的第一高度分布信息。本处理与步骤s202的处理类似,不同点在于由其它装置进行测量。另外,如上所述,优选的是,本测量中的测量点的位置与步骤s402和s502中的相同。在步骤s603中,将在步骤s602中获得的测量结果存储在存储设备中。
[0119]
尽管接下来将描述要在压印装置1中进行的压印处理,但是将省略与图3的处理描述类似的处理的描述,并且将仅描述步骤s105的处理。步骤s301至步骤s303的处理与图5的流程图中的步骤s301至步骤s303的处理相同。在步骤s604中,控制器10读出在图12的步骤s505中存储在存储设备中的差(示意图150g)。这对应于存储设备中存储的示意图130g的结果。在步骤s605中,控制器10使用在步骤s604中读出的差来校正在步骤s303中从存储设备中读出的第一高度分布信息。更具体地,控制器10将从在步骤s303中从存储设备读出的第一高度分布信息(示意图150c)中减去在步骤s604中读出的差(示意图150g)。结果,获得示意图150h。
[0120]
尽管步骤s304的处理与图5相同,但是要进行算术处理的目标是通过步骤s605的处理获得的数据,即通过去除装置因素差异而获得的结果(示意图150h)。步骤s305至步骤s307的处理与图5的流程图中的步骤s305至步骤s307的处理相同。结果,如示意图150i所示,根据基板5的表面的形状正确地计算待处理压射区域的倾斜度。尽管在图15的示例中,为了便于描述,基板卡盘和基板不包括线性分量,但是包含这些分量当然也没有问题。
[0121]
这里描述的其它装置可以是仅进行测量操作的测量装置,或者可以是与进行图3的流程图所示的处理的压印装置分开的其它压印装置。
[0122]
使用压印装置形成的固化产物的图案永久地用于各种物品中的至少一些或在制造各种物品时暂时使用。物品是电路元件、光学元件、mems、记录元件、传感器、模具等。电路元件的示例是诸如dram、sram、闪速存储器和mram的易失性和非易失性半导体存储器以及诸如lsi、ccd、图像传感器和fpga的半导体元件。模具包括压印模具等。
[0123]
固化产物的图案直接用作上述物品的组成构件中的至少一些或暂时用作抗蚀剂掩模。在基板处理步骤中进行蚀刻或离子注入之后,去除抗蚀剂掩模。
[0124]
接下来将描述制造物品的方法,其中,压印装置在基板上形成图案,处理形成有图案的基板,并且从处理后的基板制造物品。如图16a所示,制备诸如硅晶圆的基板1z,其在表
面上形成有诸如绝缘体的处理材料2z。接下来,通过喷墨方法等将压印材料3z施加到处理材料2z的表面。这里,示出了将压印材料3z作为多个液滴施加到基板上的状态。
[0125]
如图16b所示,用于利用凸凹图案压印的模具4z的一侧被引导向基板上的压印材料3z并使其面对该基板上的压印材料3z。如图16c所示,使施加有压印材料3z的基板1与模具4z接触,并施加压力。模具4z与处理材料2z之间的间隙用压印材料3z填充。在这种状态下,当经由模具4z,利用作为固化能量的光来照射压印材料3z时,压印材料3z被固化。
[0126]
如图16d所示,在压印材料3z固化后,将模具4z与基板1z分离,并且在基板1z上形成压印材料3z的固化产物的图案。在固化产物的图案中,模具的凹部对应于固化产物的凸部,并且模具的凸部对应于固化产物的凹部。即,模具4z的凹凸图案被转印到压印材料3z上。
[0127]
如图16e所示,当使用固化产物的图案作为抗蚀刻掩模进行蚀刻时,固化产物不存在或保持薄的处理材料2z的表面的一部分被去除以形成凹槽5z。如16f所示,当去除固化产物的图案时,可以获得在处理材料2z的表面上形成有凹槽5z的物品。这里,去除固化产物的图案。然而,代替在处理后去除固化产物的图案,它可以用作例如包括在半导体元件等中的层间介电膜,即,物品的组成构件。
[0128]
虽然针对示例性实施例描述了本发明,但是,应该理解,本发明不限于公开的示例性实施例。下述权利要求的范围被赋予最宽的解释,以便涵盖所有这样的修改以及等同的结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1