光扫描装置、光扫描装置的驱动方法及图像描绘系统与流程
文档序号:32435798发布日期:2022-12-06 18:49阅读:65来源:国知局
导航: X技术> 最新专利>摄影电影;光学设备的制造及其处理,应用技术
1.本发明涉及一种光扫描装置、光扫描装置的驱动方法及图像描绘系统。
背景技术:
2.作为使用硅(si)的细微加工技术制作的微机电系统(micro electro mechanical systems:mems)器件之一已知有微镜器件(也被称为微型扫描仪)。具备该微镜器件的光扫描装置为小型且低耗电量,因此可期待对激光显示器或激光投影仪等图像描绘系统的应用。
3.微镜器件的反射镜部形成为能够围绕彼此正交的第1轴及第2轴摆动,通过反射镜部围绕各轴摆动,使反射镜部所反射的光进行二维扫描。并且,已知有通过使反射镜部围绕各轴共振,能够使光进行利萨茹扫描的微镜器件。
4.专利文献1中公开有光扫描装置,其具有:传感器,检测反射镜部的旋转角;及查找表,存储有用于校正从该传感器获得的反射镜部的旋转角的振幅及相位的校正量且与各温度对应的校正量。
5.专利文献2中公开有如下光扫描装置,即,检测因驱动反射镜部的致动器的容量变化而产生的电流并且输出截止了规定的频率以上的成分的电流信号,根据该电流信号的极大值与极小值的时间差,调整赋予于致动器的驱动信号。
6.专利文献3中公开有如下光扫描装置,即,根据反射镜部的振动的相位,以使振动的最大振幅保持在反射镜部的共振范围内的方式调整第1及第2控制频率,第1及第2控制频率实质上不具有固定的整数比率。
7.专利文献1:日本特开2018-101040号公报
8.专利文献2:日本特开2017-181951号公报
9.专利文献3:日本特表2013-513828号公报
10.在上述光扫描装置中,使用检测反射镜部的围绕第1轴的角度的第1角度检测传感器及检测反射镜部的围绕第2轴的角度的第2角度检测传感器。例如,光扫描装置根据第1角度检测传感器及第2角度检测传感器的输出信号,输出表示反射镜部的角度成为基准角的基准信号(例如,零交叉信号)。该基准信号用于控制由对反射镜部照射光的光源发射的光的照射定时。
11.第1角度检测传感器的输出信号有时受到反射镜部围绕第2轴摆动等的影响而信号波形不稳定。同样地,第2角度检测传感器的输出信号有时受到反射镜部围绕第1轴摆动等的影响而信号波形不稳定。在这种情况下,若根据第1角度检测传感器及第2角度检测传感器的输出信号输出基准信号,则会导致基准信号的输出定时根据周期性而偏移。在该情况下,按每个周期而由光源发射的光的照射定时偏移,由此会导致所描绘的图像的画质降低。
12.然而,专利文献1~3中所记载的技术中,对基准信号的输出定时的偏移未给予考虑。
技术实现要素:
13.本发明是鉴于以上情况而完成的,其目的在于提供一种能够抑制所描绘的图像的画质降低的光扫描装置、光扫描装置的驱动方法及图像描绘系统。
14.本发明的光扫描装置具备:反射镜部,具有反射入射光的反射面;第1致动器,使反射镜部围绕位于包含反射镜部静止时的反射面的平面内的第1轴摆动;第2致动器,使反射镜部围绕位于包含反射镜部静止时的反射面的平面内且与第1轴交叉的第2轴摆动;第1角度检测传感器,输出与反射镜部的围绕第1轴的角度相对应的信号;第2角度检测传感器,输出与反射镜部的围绕第2轴的角度相对应的信号;及至少一个处理器,光扫描装置中,处理器进行如下处理:对第1致动器赋予具有第1驱动频率的第1驱动信号;对第2致动器赋予具有第2驱动频率的第2驱动信号;通过对第1角度检测传感器的输出信号相对于多个周期的第1驱动信号的第1相位延迟时间进行平均而导出第1平均相位延迟时间;通过对第2角度检测传感器的输出信号相对于多个周期的第2驱动信号的第2相位延迟时间进行平均而导出第2平均相位延迟时间;根据第1驱动信号及第1平均相位延迟时间,生成表示围绕第1轴的角度成为基准角的第1基准信号;根据第2驱动信号及第2平均相位延迟时间,生成表示围绕第2轴的角度成为基准角的第2基准信号。
15.另外,本发明的光扫描装置可以是如下,即,第1角度检测传感器为配置于隔着第1轴或第2轴对置的位置上的一对角度检测传感器,第1角度检测传感器的输出信号为通过相加或相减从一对角度检测传感器输出的一对输出信号而获得的输出信号,第2角度检测传感器为配置于隔着第1轴或第2轴对置的位置上的一对角度检测传感器,第2角度检测传感器的输出信号为通过相加或相减从一对角度检测传感器输出的一对输出信号而获得的输出信号。
16.并且,本发明的光扫描装置可以是如下,即,第1基准信号为表示围绕第1轴的角度成为零的信号,第2基准信号为表示围绕第2轴的角度成为零的信号。
17.并且,本发明的光扫描装置可以是如下,即,处理器进行如下处理:通过对第1角度检测传感器的输出信号为零的时间点的第1相位延迟时间进行平均而导出第1平均相位延迟时间;通过对第2角度检测传感器的输出信号为零的时间点的第2相位延迟时间进行平均而导出第2平均相位延迟时间。
18.并且,本发明的光扫描装置可以是如下,即,处理器进行如下处理:通过对从所对应的周期的第1驱动信号为零的时间点至第1角度检测传感器的输出信号为零的时间点的第1相位延迟时间进行平均而导出第1平均相位延迟时间,通过对从所对应的周期的第2驱动信号为零的时间点至第2角度检测传感器的输出信号为零的时间点的第2相位延迟时间进行平均而导出第2平均相位延迟时间。
19.并且,本发明的光扫描装置可以是如下,即,处理器进行如下处理:根据分别对第1平均相位延迟时间及第2平均相位延迟时间相加了与预先设定的条件相对应的偏移时间的时间,分别生成第1基准信号及第2基准信号。
20.并且,本发明的光扫描装置可以是如下,即,上述条件包含第1相位延迟时间及第2相位延迟时间。
21.并且,本发明的光扫描装置可以是如下,即,上述条件还包含第1驱动信号的驱动电压及第2驱动信号的驱动电压。
22.并且,本发明的光扫描装置可以是如下,即,上述条件还包含第1驱动频率及第2驱动频率。
23.并且,本发明的光扫描装置可以是如下,即,上述条件还包含环境温度。
24.并且,本发明的光扫描装置可以是如下,即,具备导出偏移时间的偏移时间导出模式,处理器进行如下处理:通过在校准时执行偏移时间导出模式,获取偏移时间;当生成第1基准信号及第2基准信号时,在校准中使用预先获取的偏移时间。
25.并且,本发明的光扫描装置可以是如下,即,具备导出第1平均相位延迟时间及第2平均相位延迟时间的平均相位延迟时间导出模式,处理器进行如下处理:通过在校准时执行平均相位延迟时间导出模式,获取第1平均相位延迟时间及第2平均相位延迟时间;当生成第1基准信号及第2基准信号时,在校准中使用预先获取的第1平均相位延迟时间及第2平均相位延迟时间。
26.并且,本发明的图像描绘系统具备:上述任一个光扫描装置;及光源,对反射镜部照射光,图像描绘系统中,处理器根据第1基准信号及第2基准信号,控制光源的光的照射定时。
27.并且,本发明的光扫描装置的驱动方法中,该光扫描装置具备:反射镜部,具有反射入射光的反射面;第1致动器,使反射镜部围绕位于包含反射镜部静止时的反射面的平面内的第1轴摆动;第2致动器,使反射镜部围绕位于包含反射镜部静止时的反射面的平面内且与第1轴交叉的第2轴摆动;第1角度检测传感器,输出与反射镜部的围绕第1轴的角度相对应的信号;及第2角度检测传感器,输出与反射镜部的围绕第2轴的角度相对应的信号,光扫描装置的驱动方法中,对第1致动器赋予具有第1驱动频率的第1驱动信号;对第2致动器赋予具有第2驱动频率的第2驱动信号;通过对第1角度检测传感器的输出信号相对于多个周期的第1驱动信号的第1相位延迟时间进行平均而导出第1平均相位延迟时间;通过对第2角度检测传感器的输出信号相对于多个周期的第2驱动信号的第2相位延迟时间进行平均而导出第2平均相位延迟时间;根据第1驱动信号及第1平均相位延迟时间,生成表示围绕第1轴的角度成为基准角的第1基准信号;根据第2驱动信号及第2平均相位延迟时间,生成表示围绕第2轴的角度成为基准角的第2基准信号。
28.发明效果
29.根据本发明,能够抑制所描绘的图像的画质的降低。
附图说明
30.图1是图像描绘系统的示意图。
31.图2是微镜器件的外观立体图。
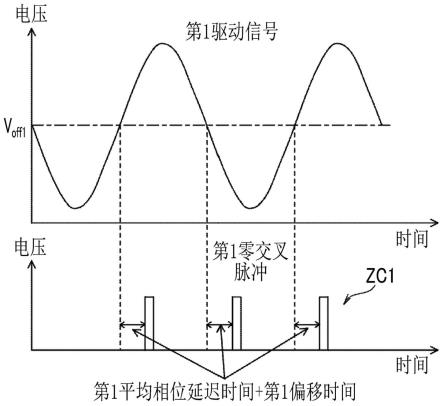
32.图3是表示第1驱动信号的一例的曲线图。
33.图4是表示第2驱动信号的一例的曲线图。
34.图5是表示驱动控制部的功能结构的一例的框图。
35.图6是表示从一对第1角度检测传感器输出的信号的一例的图。
36.图7是表示从一对第2角度检测传感器输出的信号的一例的图。
37.图8是表示第1信号处理部的结构的一例的电路图。
38.图9是表示第1信号处理的一例的图。
39.图10是表示第2信号处理的一例的图。
40.图11是用于说明第1角度检测信号零交叉的定时偏移的图。
41.图12是用于说明第1平均相位延迟时间的导出处理的图。
42.图13是用于说明第2平均相位延迟时间的导出处理的图。
43.图14是表示第1平均相位延迟时间与第1偏移时间之间的关系的一例的图。
44.图15是表示第2平均相位延迟时间与第2偏移时间之间的关系的一例的图。
45.图16是用于说明第1零交叉脉冲的生成处理的图。
46.图17是用于说明第2零交叉脉冲的生成处理的图。
47.图18是表示第1偏移时间导出处理的一例的流程图。
48.图19是表示第2偏移时间导出处理的一例的流程图。
49.图20是表示第1零交叉脉冲生成处理的一例的流程图。
50.图21是表示第2零交叉脉冲生成处理的一例的流程图。
51.图22是校准时的图像描绘系统的概略俯视图。
52.图23是表示第1校准处理的一例的流程图。
53.图24是用于说明第1校准处理的图。
54.图25是用于说明第1校准处理的图。
55.图26是表示第2校准处理的一例的流程图。
56.图27是用于说明第2校准处理的图。
57.图28是用于说明第2校准处理的图。
58.图29是变形例所涉及的微镜器件的俯视图。
59.图30是表示变形例所涉及的第1信号处理部的结构的电路图。
60.图31是表示第1驱动频率与第1偏移时间之间的关系的一例的图。
61.符号说明
62.2-光扫描装置,3-光源,4-微镜器件(mmd),5-驱动控制部,6-被扫描面,7-摄影装置,10-图像描绘系统,11a、11b-第1角度检测传感器,12a、12b-第2角度检测传感器,20-反射镜部,20a-反射面,21-第1支承部,22-第1可动框,23-第2支承部,24-第2可动框,25-连接部,26-固定框,30-压电元件,31-第1致动器,32-第2致动器,60a-第1驱动信号生成部,60b-第2驱动信号生成部,61a-第1信号处理部,61b-第2信号处理部,62a-第1相移部,62b-第2相移部,63a-第1导出部,63b-第2导出部,64-第3导出部,65a-第1零交叉脉冲输出部,65b-第2零交叉脉冲输出部,66-光源驱动部,71-缓冲放大器,72-可变增益放大器,73、77-减法电路,73a-加法电路,74-增益调整电路,75a-第1bpf电路,75b-第2bpf电路,76a-第1检波电路,76b-第2检波电路,l-光束,p1、p2、p3、p4-亮点,rn1、rn2-振动噪声,s1c-第1角度检测信号,s2c-第2角度检测信号,zc1-第1零交叉脉冲,zc2-第2零交叉脉冲,a
1-第1轴,a
2-第2轴,f
d1-第1驱动频率,f
d2-第2驱动频率。
具体实施方式
63.以下,参考附图对用于实施本发明的技术的方式例进行详细说明。
64.首先,参考图1对本实施方式所涉及的图像描绘系统10的结构进行说明。如图1所示,图像描绘系统10具有光扫描装置2及光源3。光扫描装置2包含微镜器件(以下,称为“mmd
(micro mirror device)”)4及驱动控制部5。驱动控制部5为发明的技术所涉及的处理器的一例。
65.图像描绘系统10按照驱动控制部5的控制,通过mmd4反射从光源3照射的光束l而对被扫描面6进行光扫描,由此描绘图像。被扫描面6例如为用于投影图像的屏幕或人眼的视网膜等。
66.图像描绘系统10例如适用于利萨茹扫描方式的激光显示器。具体而言,图像描绘系统10能够适用于ar(augmented reality:增强现实)眼镜或vr(virtual reality:虚拟现实)眼镜等激光扫描显示器。
67.mmd4为能够使反射镜部20(参考图2)围绕第1轴a1及与第1轴a1正交的第2轴a2摆动的压电型双轴驱动方式的微镜器件。以下,将与第2轴a2平行的方向称为x方向,将与第1轴a1平行的方向称为y方向,将与第1轴a1及第2轴a2正交的方向称为z方向。在本实施方式中,示出了第1轴a1与第2轴a2正交(即,垂直交叉)的例子,但第1轴a1与第2轴a2可以以90
°
以外的角度来交叉。这里所说的交叉表示以90度为中心而包含允许误差的规定的角度范围内。
68.光源3是作为光束l例如发射激光束的激光装置。光源3例如输出r(red:红色)、g(green:绿色)及b(blue:蓝色)这三个颜色的激光束。光源3优选在mmd4的反射镜部20静止的状态下对反射镜部20所具备的反射面20a(参考图2)垂直照射光束l。另外,当从光源3向反射面20a垂直照射光束l时,在使光束l扫描被扫描面6而进行描绘时,存在光源3成为障碍物的可能性。因此,优选通过光学系统控制从光源3发射的光束l并垂直照射反射面20a。光学系统可以包含透镜,也可以不包含透镜。并且,对反射面20a照射从光源3发射的光束l的角度并不限于垂直,可以对反射面20a斜向照射光束l。
69.驱动控制部5根据光扫描信息对光源3及mmd4输出驱动信号。光源3根据所输入的驱动信号产生光束l并照射mmd4。mmd4根据所输入的驱动信号使反射镜部20围绕第1轴a1及第2轴a2摆动。
70.通过驱动控制部5使反射镜部20分别围绕第1轴a1及第2轴a2共振,由反射镜部20反射的光束l以在被扫描面6上描绘利萨茹波形的方式进行扫描。该光扫描方式被称为利萨茹扫描方式。
71.接着,参考图2对本实施方式所涉及的mmd4的结构进行说明。如图2所示,mmd4具有反射镜部20、第1支承部21、第1可动框22、第2支承部23、第2可动框24、连接部25及固定框26。mmd4是所谓的mems扫描仪。
72.反射镜部20具有反射入射光的反射面20a。反射面20a设置于反射镜部20的一面,例如由金(au)、铝(al)、银(ag)或银合金等金属薄膜形成。反射面20a的形状例如是以第1轴a1与第2轴a2的交点为中心的圆形。
73.第1轴a1及第2轴a2存在于在反射镜部20静止的静止时包含反射面20a的平面内。mmd4的平面形状为矩形,关于第1轴a1线对称,且关于第2轴a2线对称。
74.第1支承部21在反射镜部20的外侧分别配置于隔着第2轴a2对置的位置。第1支承部21在第1轴a1上与反射镜部20连接,并且将反射镜部20支承为能够围绕第1轴a1摆动。在本实施方式中,第1支承部21为沿第1轴a1延伸的扭杆。
75.第1可动框22为包围反射镜部20的矩形的框体,在第1轴a1上经由第1支承部21与反射镜部20连接。在第1可动框22上,在隔着第1轴a1对置的位置上分别形成有压电元件30。
如此,通过在第1可动框22上形成两个压电元件30,构成一对第1致动器31。
76.一对第1致动器31配置于隔着第1轴a1对置的位置。第1致动器31通过使围绕第1轴a1的旋转扭矩作用于反射镜部20,使反射镜部20围绕第1轴a1摆动。
77.第2支承部23在第1可动框22的外侧分别配置于隔着第1轴a1对置的位置。第2支承部23在第2轴a2上与第1可动框22连接,并且将第1可动框22及反射镜部20支承为能够围绕第2轴a2摆动。在本实施方式中,第2支承部23为沿第2轴a2延伸的扭杆。
78.第2可动框24为包围第1可动框22的矩形的框体,在第2轴a2上经由第2支承部23与第1可动框22连接。在第2可动框24上,在隔着第2轴a2对置的位置上分别形成有压电元件30。如此,通过在第2可动框24上形成两个压电元件30,构成一对第2致动器32。
79.一对第2致动器32配置于隔着第2轴a2对置的位置。第2致动器32通过使围绕第2轴a2的旋转扭矩作用于反射镜部20及第1可动框22,使反射镜部20围绕第2轴a2摆动。
80.连接部25在第2可动框24的外侧,分别配置于隔着第1轴a1对置的位置。连接部25在第2轴a2上与第2可动框24连接。
81.固定框26为包围第2可动框24的矩形的框体,在第2轴a2上经由连接部25与第2可动框24连接。
82.并且,在第1可动框22中,在第1支承部21的附近,在隔着第1轴a1对置的位置上设置有一对第1角度检测传感器11a、11b。一对第1角度检测传感器11a、11b分别由压电元件构成。第1角度检测传感器11a、11b分别将因伴随反射镜部20围绕第1轴a1转动的第1支承部21的变形而被施加的力转换为电压并输出信号。即,第1角度检测传感器11a、11b输出与反射镜部20的围绕第1轴a1的角度相对应的信号。
83.并且,在第2可动框24中,在第2支承部23的附近,在隔着第2轴a2对置的位置上设置有一对第2角度检测传感器12a、12b。一对第2角度检测传感器12a、12b分别由压电元件构成。第2角度检测传感器12a、12b分别将因伴随反射镜部20围绕第2轴a2转动的第2支承部23的变形而被施加的力转换为电压并输出信号。即,第2角度检测传感器12a、12b输出与反射镜部20的围绕第2轴a2的角度相对应的信号。
84.在图2中,关于用于对第1致动器31及第2致动器32赋予驱动信号的配线及电极焊盘,省略了图示。并且,在图2中,关于用于从第1角度检测传感器11a、11b及第2角度检测传感器12a、12b输出信号的配线及电极焊盘,也省略了图示。电极焊盘在固定框26上设置有多个。
85.反射镜部20的围绕第1轴a1的偏转角(以下,称为“第1偏转角”)θ1由驱动控制部5赋予于第1致动器31的驱动信号(以下,称为“第1驱动信号”)控制。第1驱动信号例如为正弦波的交流电压。第1驱动信号包含施加于一对第1致动器31中的一个的驱动电压波形v
1a
(t)及施加于另一个的驱动电压波形v
1b
(t)。驱动电压波形v
1a
(t)及驱动电压波形v
1b
(t)彼此为逆相位(即相位差180
°
)。
86.另外,第1偏转角θ1为反射面20a的法线在xz平面上相对于z方向倾斜的角度。
87.反射镜部20的围绕第2轴a2的偏转角(以下,称为“第2偏转角”)θ2由驱动控制部5赋予于第2致动器32的驱动信号(以下,称为“第2驱动信号”)控制。第2驱动信号例如为正弦波的交流电压。第2驱动信号包含施加于一对第2致动器32中的一个的驱动电压波形v
2a
(t)及施加于另一个的驱动电压波形v
2b
(t)。驱动电压波形v
2a
(t)及驱动电压波形v
2b
(t)彼此为逆
相位(即相位差180
°
)。
88.另外,第2偏转角θ2为反射面20a的法线在yz平面上相对于z方向倾斜的角度。
89.在图3中示出第1驱动信号的一例,在图4中示出第2驱动信号的一例。图3表示第1驱动信号中所包含的驱动电压波形v
1a
(t)及v
1b
(t)。图4表示第2驱动信号中所包含的驱动电压波形v
2a
(t)及v
2b
(t)。
90.驱动电压波形v
1a
(t)及v
1b
(t)分别如下表示。
[0091]v1a
(t)=v
off1
+v1sin(2πf
d1
t)
[0092]v1b
(t)=v
off1
+v1sin(2πf
d1
t+α)
[0093]
在此,v1为振幅电压。v
off1
为偏压。v
off1
可以是零。f
d1
为驱动频率(以下,称为第1驱动频率)。t为时间。α为驱动电压波形v
1a
(t)及v
1b
(t)的相位差。在本实施方式中,例如设为α=180
°
。
[0094]
驱动电压波形v
1a
(t)及v
1b
(t)施加于一对第1致动器31,由此反射镜部20以第1驱动频率f
d1
来围绕第1轴a1摆动。
[0095]
驱动电压波形v
2a
(t)及v
2b
(t)分别如下表示。
[0096]v2a
(t)=v
off2
+v2sin(2πf
d2
t+φ)
[0097]v2b
(t)=v
off2
+v2sin(2πf
d2
t+β+φ)
[0098]
在此,v2为振幅电压。v
off2
为偏压。v
off2
可以是零。f
d2
为驱动频率(以下,称为第2驱动频率)。t为时间。β为驱动电压波形v
2a
(t)及v
2b
(t)的相位差。在本实施方式中,例如设为β=180
°
。并且,φ为驱动电压波形v
1a
(t)及v
1b
(t)与驱动电压波形v
2a
(t)及v
2b
(t)的相位差。
[0099]
驱动电压波形v
2a
(t)及v
2b
(t)施加于一对第2致动器32,由此反射镜部20以第2驱动频率f
d2
来围绕第2轴a2摆动。
[0100]
第1驱动频率f
d1
设定为与反射镜部20的围绕第1轴a1的共振频率一致。第2驱动频率f
d2
设定为与反射镜部20的围绕第2轴a2的共振频率一致。在本实施方式中,设为f
d1
>f
d2
。即,反射镜部20的围绕第1轴a1的摆动频率高于围绕第2轴a2的摆动频率。另外,第1驱动频率f
d1
及第2驱动频率f
d2
无需一定要与共振频率一致。例如,第1驱动频率f
d1
及第2驱动频率f
d2
分别可以是共振频率附近的频率范围(例如,将共振频率设为峰值的频率分布的半宽度的范围)内的频率。该频率范围例如为所谓的q值的范围内。
[0101]
接着,参考图5对驱动控制部5的功能结构进行说明。如图5所示,驱动控制部5具有第1驱动信号生成部60a、第2驱动信号生成部60b、第1信号处理部61a、第2信号处理部61b、第1相移部62a、第2相移部62b、第1导出部63a、第2导出部63b、第3导出部64、第1零交叉脉冲输出部65a、第2零交叉脉冲输出部65b及光源驱动部66。
[0102]
第1驱动信号生成部60a、第1信号处理部61a及第1相移部62a可以以使反射镜部20的围绕第1轴a1的摆动维持指定频率的振动状态的方式进行反馈控制。第2驱动信号生成部60b、第2信号处理部61b及第2相移部62b可以以使反射镜部20的围绕第2轴a2的摆动维持指定频率的振动状态的方式进行反馈控制。
[0103]
第1驱动信号生成部60a根据基准波形,生成包含上述驱动电压波形v
1a
(t)及v
1b
(t)的第1驱动信号,将所生成的第1驱动信号经由第1相移部62a赋予于一对第1致动器31。由此,反射镜部20围绕第1轴a1摆动。
[0104]
第2驱动信号生成部60b根据基准波形,生成包含上述驱动电压波形v
2a
(t)及v
2b
(t)的第2驱动信号,将所生成的第2驱动信号经由第2相移部62b赋予于一对第2致动器32。由此,反射镜部20围绕第2轴a2摆动。
[0105]
在表示第2驱动信号中所包含的驱动电压波形v
2a
(t)及v
2b
(t)的式中,如φ所示,第1驱动信号生成部60a所生成的第1驱动信号与第2驱动信号生成部60b所生成的第2驱动信号被设为相位同步。
[0106]
第1角度检测传感器11a、11b输出与反射镜部20的围绕第1轴a1的角度相对应的信号。第2角度检测传感器12a、12b输出与反射镜部20的围绕第2轴a2的角度相对应的信号。
[0107]
图6表示从一对第1角度检测传感器11a、11b输出的信号的一例。在图6中,s1a1及s1a2表示使反射镜部20不围绕第2轴a2摆动而仅围绕第1轴a1摆动时从一对第1角度检测传感器11a、11b输出的信号。信号s1a1、s1a2为具有第1驱动频率f
d1
的近似于正弦波的波形信号,彼此成为逆相位。
[0108]
当使反射镜部20围绕第1轴a1及第2轴a2同时摆动时,在一对第1角度检测传感器11a、11b的输出信号中重叠有由反射镜部20的围绕第2轴a2的摆动引起的振动噪声rn1。s1b1表示在信号s1a1中重叠有振动噪声rn1的信号。s1b2表示在信号s1a2中重叠有振动噪声rn1的信号。另外,在图6的例子中,为了说明本实施方式,强调示出了振动噪声rn1。
[0109]
图7表示从一对第2角度检测传感器12a、12b输出的信号的一例。在图7中,s2a1及s2a2表示使反射镜部20不围绕第1轴a1摆动而仅围绕第2轴a2摆动时从一对第2角度检测传感器12a、12b输出的信号。信号s2a1、s2a2为具有第2驱动频率f
d2
的近似于正弦波的波形信号,彼此成为逆相位。
[0110]
当使反射镜部20围绕第1轴a1及第2轴a2同时摆动时,在一对第2角度检测传感器12a、12b的输出信号中重叠有由反射镜部20的围绕第1轴a1的摆动引起的振动噪声rn2。s2b1表示在信号s2a1中重叠有振动噪声rn2的信号。s2b2表示在信号s2a2中重叠有振动噪声rn2的信号。另外,在图7的例子中,为了说明本实施方式,强调示出了振动噪声rn2。
[0111]
第1信号处理部61a根据从一对第1角度检测传感器11a、11b输出的s1a1、s1a2,生成去除了振动噪声rn1的信号(以下,称为“第1角度检测信号”)s1c。第2信号处理部61b根据从一对第2角度检测传感器12a、12b输出的s2a1、s2a2,生成去除了振动噪声rn2的信号(以下,称为“第2角度检测信号”)s2c。
[0112]
作为一例,第1信号处理部61a例如能够通过图8所示的结构的电路来实现。如图8所示,第1信号处理部61a由缓冲放大器71、可变增益放大器72、减法电路73及增益调整电路74构成。增益调整电路74由第1bpf(band pass filter:带通滤波器)电路75a、第2bpf电路75b、第1检波电路76a、第2检波电路76b及减法电路77构成。减法电路73及减法电路77为由运算放大器构成的差动放大电路。
[0113]
从第1角度检测传感器11a输出的信号s1b1经由缓冲放大器71输入于减法电路73的正输入端子(非反相输入端子)。并且,从缓冲放大器71输出的信号在输入于减法电路73之前的期间中途分支而输入于增益调整电路74内的第1bpf电路75a。
[0114]
从第1角度检测传感器11b输出的信号s1b2经由可变增益放大器72输入于减法电路73的负输入端子(反相输入端子)。并且,从可变增益放大器72输出的信号在输入于减法电路73之前的期间中途分支而输入于增益调整电路74内的第2bpf电路75b。
[0115]
第1bpf电路75a及第2bpf电路75b分别具有以第2驱动频率f
d2
为中心频率的通带
b1。通带b1例如为f
d2
±
5kh的频带。振动噪声rn1具有第2驱动频率f
d2
,因此通过通带b1。因此,第1bpf电路75a从缓冲放大器71输入的信号中提取并输出振动噪声rn1。第2bpf电路75b从可变增益放大器72输入的信号中提取并输出振动噪声rn1。
[0116]
第1检波电路76a及第2检波电路76b分别例如由rms-dc转换器(root mean squared value to direct current converter:均方根直流转换器)构成。第1检波电路76a将从第1bpf电路75a输入的振动噪声rn1的振幅转换为dc电压信号并输入于减法电路77的正输入端子。第2检波电路76b将从第2bpf电路75b输入的振动噪声rn1的振幅转换为dc电压信号并输入于减法电路77的负输入端子。
[0117]
减法电路77输出从第1检波电路76a输入的dc电压信号减去从第2检波电路76b输入的dc电压信号的值d1。值d1与从第1角度检测传感器11a输出的信号s1b1中所包含的振动噪声rn1的振幅与从第1角度检测传感器11b输出的信号s1b2中所包含的振动噪声rn1的振幅之差对应。减法电路77将值d1作为增益调整值输入于可变增益放大器72的增益调整端子。
[0118]
可变增益放大器72通过将作为增益调整值输入的值d1乘以从第1角度检测传感器11b输入的信号s1b2,调整信号s1b2的振幅电平。如此,通过增益调整电路74进行反馈控制,由此通过可变增益放大器72之后的信号s1b2中所包含的振动噪声rn1的振幅调整为与通过缓冲放大器71之后的信号s1b1中所包含的振动噪声rn1的振幅一致。
[0119]
减法电路73输出从输入于正输入端子的信号s1b1减去输入于负输入端子的信号s1b2的值。通过上述反馈控制,两个信号中所包含的振动噪声rn1的振幅一致,因此通过基于减法电路73的减法处理,两个信号中所包含的振动噪声rn1相互抵消。因此,从减法电路73输出去除了振动噪声rn1的信号即第1角度检测信号s1c(参考图9)。
[0120]
图9示出了根据从一对第1角度检测传感器11a、11b输出的s1b1、s1b2,生成第1角度检测信号s1c的情况。第1角度检测信号s1c与将从信号s1b1去除了振动噪声rn1的信号的振幅设为两倍的信号对应。
[0121]
当反射镜部20的围绕第1轴a1的摆动维持共振状态时,如图9所示,从第1信号处理部61a输出的第1角度检测信号s1c相对于第1驱动信号中所包含的驱动电压波形v
1a
(t),在相位上产生90
°
的延迟。
[0122]
第2信号处理部61b能够通过与第1信号处理部61a相同的结构来实现,因此省略说明。
[0123]
图10示出了根据从一对第2角度检测传感器12a、12b输出的s2b1、s2b2,生成第2角度检测信号s2c的情况。第2角度检测信号s2c与将从信号s2b1去除了振动噪声rn2的信号的振幅设为两倍的信号对应。
[0124]
当反射镜部20的围绕第2轴a2的摆动维持共振状态时,如图10所示,从第2信号处理部61b输出的第2角度检测信号s2c相对于第2驱动信号中所包含的驱动电压波形v
2a
(t),在相位上产生90
°
的延迟。
[0125]
通过第1信号处理部61a生成的第1角度检测信号s1c反馈到第1驱动信号生成部60a。第1相移部62a使从第1驱动信号生成部60a输出的驱动电压波形的相位位移。第1相移部62a例如使相位位移90
°
。
[0126]
通过第2信号处理部61b生成的第2角度检测信号s2c反馈到第2驱动信号生成部
60b。第2相移部62b使从第2驱动信号生成部60b输出的驱动电压波形的相位位移。第2相移部62b例如使相位位移90
°
。
[0127]
在理想情况下通过第1信号处理部61a生成的第1角度检测信号s1c成为正弦波,但不会成为平滑的正弦波的情况居多。这是因为,在由第1信号处理部61a进行处理中,无法完全去除反射镜部20围绕第2轴a2摆动的影响。在该情况下,作为一例,如图11所示,第1角度检测信号s1c零交叉的定时可能会根据周期而稍微偏移。在图11中,示出了重合了多个周期的第1角度检测信号s1c零交叉的定时的波形的例子。
[0128]
因此,第1导出部63a通过对多个周期的第1角度检测信号s1c进行平均,降低由上述每个周期的偏移引起的影响。以下,对由第1导出部63a进行的处理进行说明。
[0129]
第1导出部63a通过对第1角度检测信号s1c相对于最近的多个周期的第1驱动信号的相位延迟时间(以下,称为“第1相位延迟时间”)进行平均而导出第1平均相位延迟时间。具体而言,作为一例,如图12所示,第1导出部63a关于最近的多个周期的第1驱动信号及第1角度检测信号s1c,对从所对应的周期的第1驱动信号为零的时间点至第1角度检测信号s1c为零的时间点的第1相位延迟时间t1进行平均而导出第1平均相位延迟时间。在本实施方式中,第1驱动信号仅偏移偏压v
off1
的量,因此第1驱动信号为零的时间点表示第1驱动信号为v
off1
的时间点。
[0130]
同样地,在理想情况下通过第2信号处理部61b生成的第2角度检测信号s2c也成为正弦波,但反射镜部20围绕第1轴a1摆动的影响仍残留,因此不会成为平滑的正弦波的情况居多。因此,第2导出部63b通过对多个周期的第2角度检测信号s2c进行平均,降低由上述每个周期的偏移引起的影响。以下,对由第2导出部63b进行的处理进行说明。
[0131]
第2导出部63b通过对第2角度检测信号s2c相对于最近的多个周期的第2驱动信号的相位延迟时间(以下,称为“第2相位延迟时间”)进行平均而导出第2平均相位延迟时间。具体而言,作为一例,如图13所示,第2导出部63b关于最近的多个周期的第2驱动信号及第2角度检测信号s2c,通过对从所对应的周期的第2驱动信号为零的时间点至第2角度检测信号s2c为零的时间点的第2相位延迟时间t2进行平均而导出第2平均相位延迟时间。在本实施方式中,第2驱动信号仅偏移偏压v
off2
的量,因此第2驱动信号为零的时间点表示第2驱动信号为v
off2
的时间点。
[0132]
另外,在由以上的第1导出部63a及第2导出部63b进行的处理中,使用了正弦波从负向正而成为零的时间点,但并不限定于此。例如,可以使用正弦波从正向负而成为零的时间点,也可以使用正弦波从负向正而成为零的时间点及正弦波从正向负而成为零的时间点这两者。
[0133]
通过由以上的第1导出部63a及第2导出部63b进行的处理,能够降低由第1角度检测信号s1c及第2角度检测信号s2c零交叉的定时的每个周期的差异引起的影响。然而,有时在第1角度检测信号s1c成为零的定时与实际上第1偏转角θ1成为零的定时之间,会产生偏移时间t31(以下,称为“第1偏移时间t3
1”)这一偏移。同样地,有时在第2角度检测信号s2c成为零的定时与实际上第2偏转角θ2成为零的定时之间,会产生偏移时间t32(以下,称为“第2偏移时间t3
2”)这一偏移。
[0134]
在图14中示出第1平均相位延迟时间与第1偏移时间t31之间的关系的一例,在图15中示出第2平均相位延迟时间与第2偏移时间t32之间的关系的一例。如图14所示,随着第
1平均相位延迟时间变长而第1偏移时间t31变长。如图15所示,随着第2平均相位延迟时间变长而第2偏移时间t32变短。
[0135]
因此,第3导出部64作为与预先设定的条件相对应的偏移时间,导出第1偏移时间t31及第2偏移时间t32。在本实施方式中,作为该条件,对适用了第1平均相位延迟时间及第2平均相位延迟时间的例子进行说明。另外,代替第1平均相位延迟时间,例如可以使用最近的周期的第1相位延迟时间。并且,代替第2平均相位延迟时间,例如可以使用最近的周期的第2相位延迟时间。
[0136]
具体而言,第3导出部64按照如下函数f1,导出与第1平均相位延迟时间t1
avg
相对应的第1偏移时间t31。
[0137]
t31=f1(t1
avg
)
[0138]
另外,第3导出部64可以不使用函数f1而使用第1平均相位延迟时间t1
avg
与第1偏移时间t31建立对应关联的查找表来导出与第1平均相位延迟时间t1
avg
相对应的第1偏移时间t31。
[0139]
并且,第3导出部64按照如下函数f2,导出与第2平均相位延迟时间t2
avg
相对应的第2偏移时间t32。
[0140]
t32=f2(t2
avg
)
[0141]
另外,第3导出部64可以不使用函数f2而使用第2平均相位延迟时间t2
avg
与第2偏移时间t32建立对应关联的查找表来导出与第2平均相位延迟时间t2
avg
相对应的第2偏移时间t32。
[0142]
函数f1为通过近似通过校准获得的第1平均相位延迟时间与第1偏移时间t31之间的关系而求出的函数。函数f2为通过近似通过校准获得的第2平均相位延迟时间与第2偏移时间t32之间的关系而求出的函数。关于校准的详细内容,将在后面叙述。
[0143]
第1零交叉脉冲输出部65a根据第1驱动信号、通过第1导出部63a导出的第1平均相位延迟时间及通过第3导出部64导出的第1偏移时间t31,生成基准信号(以下,称为“第1基准信号”)。第1基准信号为表示反射镜部20的围绕第1轴a1的角度成为基准角的信号。在本实施方式中,对作为该基准角适用了零的例子进行说明。即,第1零交叉脉冲输出部65a根据第1驱动信号、通过第1导出部63a导出的第1平均相位延迟时间及通过第3导出部64导出的第1偏移时间t31,生成作为第1基准信号的一例的零交叉脉冲(以下,称为“第1零交叉脉冲”。)zc1。第1零交叉脉冲输出部65a由零交叉检测电路构成。第1零交叉脉冲为表示反射镜部20的围绕第1轴a1的角度成为零的零交叉信号。
[0144]
如图16所示,第1零交叉脉冲输出部65a以从第1驱动信号横穿零(在本实施方式中为v
off1
)的定时起经过了相加了第1平均相位延迟时间与第1偏移时间t31的时间的定时来生成第1零交叉脉冲zc1。第1零交叉脉冲输出部65a将所生成的第1零交叉脉冲zc1输出至光源驱动部66。
[0145]
第2零交叉脉冲输出部65b根据第2驱动信号、通过第2导出部63b导出的第2平均相位延迟时间及通过第3导出部64导出的第2偏移时间t32,生成基准信号(以下,称为“第2基准信号”)。第2基准信号为表示反射镜部20的围绕第2轴a2的角度成为基准角的信号。在本实施方式中,对作为该基准角适用了零的例子进行说明。即,第2零交叉脉冲输出部65b根据第2驱动信号、通过第2导出部63b导出的第2平均相位延迟时间及通过第3导出部64导出的
第2偏移时间t32,生成作为第2基准信号的一例的零交叉脉冲(以下,称为“第2零交叉脉冲”。)zc2。第2零交叉脉冲输出部65b由零交叉检测电路构成。第2零交叉脉冲为表示反射镜部20的围绕第2轴a2的角度成为零的零交叉信号。
[0146]
如图17所示,第2零交叉脉冲输出部65b以从第2驱动信号横穿零(在本实施方式中为v
off2
)的定时起经过了相加了第2平均相位延迟时间与第2偏移时间t32的时间的定时来生成第2零交叉脉冲zc2。第2零交叉脉冲输出部65b将所生成的第2零交叉脉冲zc2输出至光源驱动部66。
[0147]
另外,第1零交叉脉冲输出部65a及第2零交叉脉冲输出部65b使用正弦波从负向正而成为零的时间点及正弦波从正向负而成为零的时间点这两者输出零交叉脉冲,但并不限定于此。例如,第1零交叉脉冲输出部65a及第2零交叉脉冲输出部65b可以使用正弦波从负向正而成为零的时间点及正弦波从正向负而成为零的时间点中的任一个输出零交叉脉冲。
[0148]
光源驱动部66例如根据从图像描绘系统10的外部供给的描绘数据驱动光源3。并且,光源驱动部66以使由光源3发射的激光束的照射定时与第1零交叉脉冲zc1及第2零交叉脉冲zc2同步的方式控制照射定时。
[0149]
接着,参考图18对第1偏移时间导出处理的流程进行说明。例如,第1偏移时间导出处理在由图像描绘系统10进行的图像的描绘中,以预先设定的时间间隔来执行。该时间间隔例如可以是相当于第1驱动信号的一个周期的时间间隔,也可以是相当于多个周期的时间间隔,还可以是与周期无关而预先设定的时间间隔。
[0150]
在图18的步骤s10中,第1导出部63a按每个周期获取从所对应的周期的第1驱动信号为零的时间点至第1角度检测信号s1c为零的时间点的第1相位延迟时间。在步骤s12中,第1导出部63a通过对在步骤s10中获取的最近的多个周期的第1相位延迟时间进行平均而导出第1平均相位延迟时间。
[0151]
在步骤s14中,第3导出部64按照前述的函数f1,导出与在步骤s12中导出的第1平均相位延迟时间相对应的第1偏移时间t31。若步骤s14的处理结束,则第1偏移时间导出处理结束。通过在图像的描绘中定期执行第1偏移时间导出处理,更新第1平均相位延迟时间及第1偏移时间t31。
[0152]
接着,参考图19对第2偏移时间导出处理的流程进行说明。例如,第2偏移时间导出处理在由图像描绘系统10进行的图像的描绘中,以预先设定的时间间隔来执行。该时间间隔例如可以是相当于第2驱动信号的一个周期的时间间隔,也可以是相当于多个周期的时间间隔,还可以是与周期无关而预先设定的时间间隔。
[0153]
在图19的步骤s20中,第2导出部63b按每个周期获取从所对应的周期的第2驱动信号为零的时间点至第2角度检测信号s2c为零的时间点的第2相位延迟时间。在步骤s22中,第2导出部63b通过对在步骤s20中获取的最近的多个周期的第2相位延迟时间进行平均而导出第2平均相位延迟时间。
[0154]
在步骤s24中,第3导出部64按照前述的函数f2,导出与在步骤s22中导出的第2平均相位延迟时间相对应的第2偏移时间t32。若步骤s24的处理结束,则第2偏移时间导出处理结束。通过在图像的描绘中定期执行第2偏移时间导出处理,更新第2平均相位延迟时间及第2偏移时间t32。
[0155]
接着,参考图20对第1零交叉脉冲生成处理的流程进行说明。例如,在由图像描绘
系统10进行的图像的描绘中,执行图20所示的第1零交叉脉冲生成处理。
[0156]
在图20的步骤s30中,第1零交叉脉冲输出部65a判定第1驱动信号是否为零。当该判定成为肯定判定时,处理转到步骤s32,当成为否定判定时,再度执行步骤s30。
[0157]
在步骤s32中,第1零交叉脉冲输出部65a待机,直至从在步骤s30中第1驱动信号成为零的定时起经过相加了通过上述第1偏移时间导出处理导出的第1平均相位延迟时间及第1偏移时间t31的时间。若从在步骤s30中第1驱动信号成为零的定时起经过相加了第1平均相位延迟时间及第1偏移时间t31的时间,则步骤s32的判定成为肯定判定,处理转到步骤s34。
[0158]
在步骤s34中,第1零交叉脉冲输出部65a生成第1零交叉脉冲zc1,将所生成的第1零交叉脉冲zc1输出至光源驱动部66。若步骤s34的处理结束,则处理返回到步骤s30。若由图像描绘系统10进行的图像的描绘处理结束,则第1零交叉脉冲生成处理结束。
[0159]
接着,参考图21对第2零交叉脉冲生成处理的流程进行说明。例如,在由图像描绘系统10进行的图像的描绘中,执行图21所示的第2零交叉脉冲生成处理。
[0160]
在图21的步骤s40中,第2零交叉脉冲输出部65b判定第2驱动信号是否为零。当该判定成为肯定判定时,处理转到步骤s42,当成为否定判定时,再度执行步骤s40。
[0161]
在步骤s42中,第2零交叉脉冲输出部65b待机,直至从在步骤s40中第2驱动信号成为零的定时起经过相加了通过上述第2偏移时间导出处理导出的第2平均相位延迟时间及第2偏移时间t32的时间。在步骤s40中,若从第2驱动信号成为零的定时起经过相加了第2平均相位延迟时间及第2偏移时间t32的时间,则步骤s42的判定成为肯定判定,处理转到步骤s44。
[0162]
在步骤s44中,第2零交叉脉冲输出部65b生成第2零交叉脉冲zc2,将所生成的第2零交叉脉冲zc2输出至光源驱动部66。若步骤s44的处理结束,则处理返回到步骤s40。若由图像描绘系统10进行的图像的描绘处理结束,则第2零交叉脉冲生成处理结束。
[0163]
接着,对通过校准求出前述的函数f1、f2的处理进行说明。图22是校准时的图像描绘系统10的概略俯视图。如图22所示,在校准时图像描绘系统10还具备摄影装置7。摄影装置7设置于能够拍摄被扫描面6的位置。摄影装置7以预先设定的帧速率来拍摄被扫描面6,将拍摄获得的图像数据输出至驱动控制部5。摄影装置7的帧速率例如设定为与图像描绘系统10描绘图像时的帧速率相同的帧速率。作为摄影装置7的例子,可举出数码相机。
[0164]
本实施方式所涉及的光扫描装置2具备导出第1偏移时间t31及第2偏移时间t32的偏移时间导出模式。通过在校准时执行偏移时间导出模式,执行图23所示的第1校准处理及图26所示的第2校准处理。作为校准的执行定时,可举出光扫描装置2启动时或由用户输入了校准的执行指示的定时等。并且,校准的执行定时可以是光扫描装置2从工厂出货之前。在该情况下,通过校准获得的数据例如保存于驱动控制部5所具备的非易失性存储部。并且,在该情况下,在光扫描装置2的出货目的地的用户据点中,摄影装置7可以不包含于图像描绘系统10。
[0165]
在图23的步骤s50中,如前述,第1驱动信号生成部60a生成第1驱动信号,将所生成的第1驱动信号经由第1相移部62a赋予于一对第1致动器31。即,在第1校准处理中,使反射镜部20不围绕第2轴a2摆动而仅围绕第1轴a1摆动。
[0166]
在步骤s52中,第1导出部63a按每个周期获取从所对应的周期的第1驱动信号为零
的时间点至第1角度检测信号s1c为零的时间点的第1相位延迟时间。在步骤s54中,第1导出部63a通过对在步骤s52中获取的最近的多个周期的第1相位延迟时间进行平均而导出第1平均相位延迟时间。
[0167]
在步骤s56中,第1零交叉脉冲输出部65a以从第1驱动信号横穿零的定时起经过了相加了第1平均相位延迟时间与第1偏移时间t31的时间的定时来生成第1零交叉脉冲zc1。第1零交叉脉冲输出部65a将所生成的第1零交叉脉冲zc1输出至光源驱动部66。在第1校准处理中,光源驱动部66与第1零交叉脉冲zc1同步地从光源3照射激光束。此时的第1偏移时间t31是作为临时值来设定的时间。
[0168]
变更第1驱动频率及第1偏移时间t31的同时执行多次以上的从步骤s50至步骤s56的处理。若第1驱动频率变更,则第1平均相位延迟时间也成为不同的值。即,分别根据多个第1平均相位延迟时间及第1偏移时间t31的组合,从第1零交叉脉冲输出部65a输出第1零交叉脉冲zc1,从光源3照射激光束。
[0169]
在步骤s58中,第3导出部64获取通过摄影装置7拍摄的图像数据。另外,驱动控制部5与摄影装置7被设为时刻同步。因此,第3导出部64根据赋予于图像数据的时刻信息,能够确定哪个图像数据是根据哪个组合的第1平均相位延迟时间及第1偏移时间t31而照射了激光束时的图像数据。
[0170]
当相对于第1平均相位延迟时间作为临时值来设定的第1偏移时间t31与实际的第1偏移时间t31不同时,作为一例,与该第1平均相位延迟时间及第1偏移时间t31的组合对应的图像数据所表示的图像如图24所示。图24所示的亮点p1表示根据以第1驱动信号从负向正而成为零的时间点为基准的第1零交叉脉冲zc1,从光源3照射的激光束由mmd4的反射镜部20反射而描绘于被扫描面6的亮点。并且,图24所示的亮点p2表示根据以第1驱动信号从正向负而成为零的时间点为基准的第1零交叉脉冲zc1,从光源3照射的激光束由mmd4的反射镜部20反射而描绘于被扫描面6的亮点。
[0171]
即,在该情况下,在图像数据所表示的图像中,亮点p1及亮点p2在与第2轴a2对应的轴上错开。相对于此,当相对于第1平均相位延迟时间作为临时值来设定的第1偏移时间t31与实际的第1偏移时间t31一致时,作为一例,与该第1平均相位延迟时间及第1偏移时间t31的组合对应的图像数据所表示的图像如图25所示。即,在该情况下,亮点p1与亮点p2重叠。
[0172]
因此,在步骤s60中,第3导出部64将亮点p1与亮点p2重叠的图像数据被拍摄时的第1平均相位延迟时间及第1偏移时间t31的组合确定为正确的组合。可获得多个该正确的组合,因此作为一例可获得图14所示的第1平均相位延迟时间及第1偏移时间t31的关系。第3导出部64通过近似所获得的第1平均相位延迟时间及第1偏移时间t31的关系而导出函数f1。该函数f1用于前述的第1偏移时间导出处理(参考图18)的步骤s14中。另外,第3导出部64可以将所获得的第1平均相位延迟时间及第1偏移时间t31的关系保存为查找表。若步骤s60的处理结束,则第1校准处理结束。
[0173]
在图26的步骤s70中,如前述,第2驱动信号生成部60b生成第2驱动信号,将所生成的第2驱动信号经由第2相移部62b赋予于一对第2致动器32。即,在第2校准处理中,使反射镜部20不围绕第1轴a1摆动而仅围绕第2轴a2摆动。
[0174]
在步骤s72中,第2导出部63b按每个周期获取从所对应的周期的第2驱动信号为零
的时间点至第2角度检测信号s2c为零的时间点的第2相位延迟时间。在步骤s74中,第2导出部63b通过对在步骤s72中获取的最近的多个周期的第2相位延迟时间进行平均而导出第2平均相位延迟时间。
[0175]
在步骤s76中,第2零交叉脉冲输出部65b以从第2驱动信号横穿零的定时起经过了相加了第2平均相位延迟时间与第2偏移时间t32的时间的定时来生成第2零交叉脉冲zc2。第2零交叉脉冲输出部65b将所生成的第2零交叉脉冲zc2输出至光源驱动部66。在第2校准处理中,光源驱动部66与第2零交叉脉冲zc2同步地从光源3照射激光束。此时的第2偏移时间t32是作为临时值来设定的时间。
[0176]
变更第2驱动频率及第2偏移时间t32的同时执行多次以上的从步骤s70至步骤s76的处理。若第2驱动频率变更,则第2平均相位延迟时间也成为不同的值。即,分别根据多个第2平均相位延迟时间及第2偏移时间t32的组合,从第2零交叉脉冲输出部65b输出第2零交叉脉冲zc2,从光源3照射激光束。
[0177]
在步骤s78中,第3导出部64获取通过摄影装置7拍摄的图像数据。另外,驱动控制部5与摄影装置7被设为时刻同步。因此,第3导出部64根据赋予于图像数据的时刻信息,能够确定哪个图像数据是根据哪个组合的第2平均相位延迟时间及第2偏移时间t32而照射了激光束时的图像数据。
[0178]
当相对于第2平均相位延迟时间作为临时值来设定的第2偏移时间t32与实际的第2偏移时间t32不同时,作为一例,与该第2平均相位延迟时间及第2偏移时间t32的组合对应的图像数据所表示的图像如图27所示。图27所示的亮点p3表示根据以第2驱动信号从负向正而成为零的时间点为基准的第2零交叉脉冲zc2,从光源3照射的激光束由mmd4的反射镜部20反射而描绘于被扫描面6的亮点。并且,图27所示的亮点p4表示根据以第2驱动信号从正向负而成为零的时间点为基准的第2零交叉脉冲zc2,从光源3照射的激光束由mmd4的反射镜部20反射而描绘于被扫描面6的亮点。
[0179]
即,在该情况下,在图像数据所表示的图像中,亮点p3与亮点p4在与第1轴a1对应的轴上错开。相对于此,当相对于第2平均相位延迟时间作为临时值来设定第2偏移时间t32与实际的第2偏移时间t32一致时,作为一例,与该第2平均相位延迟时间及第2偏移时间t32的组合对应的图像数据所表示的图像如图28所示。即,在该情况下,亮点p3与亮点p4重叠。
[0180]
因此,在步骤s80中,第3导出部64将亮点p3与亮点p4重叠的图像数据被拍摄时的第2平均相位延迟时间及第2偏移时间t32的组合确定为正确的组合。可获得多个该正确的组合,因此作为一例可获得图15所示的第2平均相位延迟时间及第2偏移时间t32的关系。第3导出部64通过近似所获得的第2平均相位延迟时间及第2偏移时间t32的关系而导出函数f2。该函数f2用于前述的第2偏移时间导出处理(参考图19)的步骤s24中。另外,第3导出部64可以将所获得的第2平均相位延迟时间及第2偏移时间t32的关系保存为查找表。若步骤s70的处理结束,则第2校准处理结束。
[0181]
如以上说明,根据本实施方式,能够减少第1零交叉脉冲zc1及第2零交叉脉冲zc2的输出定时的每个周期的偏移,其结果,能够抑制所描绘的图像的画质的降低。
[0182]
另外,在上述实施方式中示出的mmd4的结构为一例。mmd4的结构能够进行各种变形。例如,可以将使反射镜部20围绕第1轴a1摆动的第1致动器31配置于第2可动框24,将使反射镜部20围绕第2轴a2摆动的第2致动器32配置于第1可动框22。
[0183]
并且,在上述实施方式中,对一对第1角度检测传感器11a、11b配置于隔着第1轴a1对置的位置上的情况进行了说明,但并不限定于此。例如,如图29所示,一对第1角度检测传感器11a、11b可以配置于隔着第2轴a2对置的位置。在图29的例子中,一对第1角度检测传感器11a、11b在第1可动框22上分别配置于第1支承部21的附近。第1角度检测传感器11a配置于与反射镜部20中的其中一侧连接的第1支承部21的附近。第1角度检测传感器11b配置于与反射镜部20中的另一侧连接的第1支承部21的附近。因此,一对第1角度检测传感器11a、11b配置于隔着第2轴a2对置且隔着反射镜部20对置的位置。并且,一对第1角度检测传感器11a、11b配置于从第1轴a1向相同的方向(在图29的例子中为-x方向)偏移的位置。
[0184]
如上述实施方式,当一对第1角度检测传感器11a、11b配置于隔着第1轴a1对置的位置时,通过两个输出信号中从其中一个减去另一个,能够去除振动噪声。相对于此,如该方式例,当一对第1角度检测传感器11a、11b配置于隔着第2轴a2对置的位置时,通过相加两个输出信号,能够去除振动噪声。
[0185]
将该方式例中的第1信号处理部61a的结构的一例示于图30中。如图30所示,在该方式例中,第1信号处理部61a代替减法电路73而具有加法电路73a。加法电路73a输出相加了从第1角度检测传感器11a经由缓冲放大器71输入的信号s1b1与从第1角度检测传感器11b经由可变增益放大器72输入的信号s1b2的值。
[0186]
并且,在上述实施方式中,对一对第2角度检测传感器12a、12b配置于隔着第2轴a2对置的位置的情况进行了说明,但并不限定于此。例如,如图29所示,一对第2角度检测传感器12a、12b可以配置于隔着第1轴a1对置的位置。在图29的例子中,一对第2角度检测传感器12a、12b在第2可动框24上分别配置于第2支承部23的附近。第2角度检测传感器12a配置于与第1可动框22中的其中一侧连接的第2支承部23的附近。第2角度检测传感器12b配置于与第1可动框22中的另一侧连接的第2支承部23的附近。因此,一对第2角度检测传感器12a、12b配置于隔着第1轴a1对置且隔着反射镜部20及第1可动框22对置的位置。并且,一对第2角度检测传感器12a、12b配置于从第2轴a2向相同的方向(在图29的例子中为+y方向)偏移的位置。
[0187]
如上述实施方式,当一对第2角度检测传感器12a、12b配置于隔着第2轴a2对置的位置时,通过两个输出信号中从其中一个减去另一个,能够去除振动噪声。相对于此,如该方式例,一对第2角度检测传感器12a、12b配置于隔着第1轴a1对置的位置时,通过相加两个输出信号,能够去除振动噪声。该方式例中的第2信号处理部61b的结构能够通过与图30所示的第1信号处理部61a相同的结构来实现,因此省略说明。
[0188]
并且,在上述实施方式中,可以是一对第1角度检测传感器11a、11b中的任一个设置于mmd4的方式。同样地,也可以是一对第2角度检测传感器12a、12b中的任一个设置于mmd4的方式。
[0189]
并且,在上述实施方式中,对在描绘图像时导出第1平均相位延迟时间及第2平均相位延迟时间情况进行了说明,但并不限定于此。可以是通过在校准时执行导出第1平均相位延迟时间及第2平均相位延迟时间的平均相位延迟时间导出模式,获取第1平均相位延迟时间及第2平均相位延迟时间的方式。在该情况下,当生成第1零交叉脉冲zc1及第2零交叉脉冲zc2时,在校准中使用预先获取的第1平均相位延迟时间及第2平均相位延迟时间。在该情况下,作为校准的执行定时,可举出mmd4启动时或由用户输入了校准的执行指示的定时
等。
[0190]
并且,在上述实施方式中,对第3导出部64按照上述函数f1导出与第1平均相位延迟时间相对应的第1偏移时间t31的情况进行了说明,但并不限定于此。在图31中示出第1驱动频率与第1偏移时间t31之间的关系的一例。在图31中示出了以分别成为两个不同的第1偏转角θ1的方式使反射镜部20围绕第1轴a1摆动时的第1驱动频率与第1偏移时间t31之间的关系。并且,图31中的实线表示与虚线相比以第1偏转角θ1大的角度来使反射镜部20围绕第1轴a1摆动的状态下的第1驱动频率与第1偏移时间t31之间的关系。如图31所示,第1驱动频率越高,第1偏移时间t31越长。在图31中,示出了第1驱动频率与第1偏移时间t31之间的关系,但第1偏移时间t31不仅根据第1驱动频率而发生变化,而且还根据第1驱动信号的驱动电压而发生变化。第1驱动信号的驱动电压例如相当于第1驱动信号的振幅。
[0191]
因此,第3导出部64按照如下所示的函数f3,还可以导出与第1驱动频率f1及第1驱动信号的驱动电压v1相对应的第1偏移时间t31。
[0192]
t31=f3(t1
avg
、f1、v1)
[0193]
同样地,第3导出部64按照如下所示的函数f4,还可以导出与第2驱动频率f2及第2驱动信号的驱动电压v2相对应的第2偏移时间t32。
[0194]
t32=f4(t2
avg
、f2、v2)
[0195]
并且,第3导出部64按照如下所示的函数f5、f6,还可以导出与环境温度t相对应的第1偏移时间t31及第2偏移时间t32。在该情况下,在mmd4中设置有测量环境温度的温度传感器。
[0196]
t31=f5(t1
avg
、t)
[0197]
t32=f6(t2
avg
、t)
[0198]
并且,第3导出部64按照如下所示的函数f7,还可以导出与第1驱动频率f1、第1驱动信号的驱动电压v1及环境温度t相对应的第1偏移时间t31。
[0199]
t31=f7(t1
avg
、f1、v1、t)
[0200]
同样地,第3导出部64按照如下所示的函数f8,还可以导出与第2驱动频率f2、第2驱动信号的驱动电压v2及环境温度t相对应的第2偏移时间t32。
[0201]
t32=f8(t2
avg
、f2、v2、t)
[0202]
另外,在上述函数f3、f7中,可以仅是第1驱动频率f1及第1驱动信号的驱动电压v1中的任一个。并且,在上述函数f4、f8中,可以仅是第2驱动频率f2及第2驱动信号的驱动电压v2中的任一个。
[0203]
并且,能够对驱动控制部5的硬件结构进行各种变形。能够使用模拟运算电路及数字运算电路中的至少一个来构成驱动控制部5。驱动控制部5可以由一个处理器来构成,也可以由相同种类或不同种类的两个以上的处理器的组合来构成。在处理器中包含cpu(central processing unit:中央处理器)、可编程逻辑器件(programmable logic device:pld)及专用电路等。众所周知,cpu为执行软件(程序)而作为各种处理部发挥作用的通用的处理器。pld为fpga(field programmable gate array:现场可编程门阵列)等制造后能够变更电路结构的处理器。专用电路为asic(application specific integrated circuit:专用集成电路)等具有为了执行特定处理而专门设计的电路结构的处理器。
- 该技术已申请专利。仅供学习研究,如用于商业用途,请联系技术所有人。
- 技术研发人员:吉泽宏俊 园田慎一郎 菱沼庆一 田中伸也 远藤靖
- 技术所有人:富士胶片株式会社
- 我是此专利的发明人
- 该领域下的技术专家
- 如您需求助技术专家,请点此查看客服电话进行咨询。
- 1、孙老师:1.机机器人技术 2.机器视觉 3.网络控制系统
- 2、杨老师:物理电子学
- 如您是高校老师,可以点此联系我们加入专家库。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
精彩留言,会给你点赞!
专利分类正在加载中....