一种结构参数可调的双目视觉系统
1.本发明涉及三维成像领域,具体涉及一种结构参数可调的双目视觉系统。
背景技术:
2.三维成像测量技术一直以来都是测量领域的一个研究热点,其以光电子学、计算机技术、信号与系统、图像处理等现代科学技术为基础,具有极大的研究潜力与十分广泛的应用背景,相较于二维成像技术,三维成像技术可以获得目标的更多信息,对目标的识别有着极大的帮助。双目立体视觉技术是目前主要的三维成像技术之一。双目立体视觉成像技术利用三角测距法,通过分析两台摄像机对应视点之间的空间几何关系获取目标的三维信息,其具有成像分辨率高、系统结构相对简单、成本较低等优势,目前已被广泛应用于测绘、医学影像、军事侦察以及工业监测等领域,但其也受于测量原理的限制,系统的基线长度很大程度上影响着系统的作用距离,除此之外相机光轴与基线的角度等的系统结构参数也影响着系统的成像精度等重要性能,要提高系统的探测距离便要增长系统的基线长度,要提高系统成像精度便要使相机光轴与基线的角度保持在30
°
~45
°
之间。目前,为增大系统的基线长度主要采用将两相机安装在滑轨上来改变相机之间的空间距离进而调节系统基线长度的方法,但随着需要调节范围的扩大,系统体积必然随之增大,与此同时,还无法调节相机光轴与基线之间的角度,存在一定的缺陷。如何在调节系统基线增大探测距离的同时不改变系统体积的大小,以及怎样在此调节过程中相机光轴与基线之间的角度始终处于一定范围提高成像精度都是目前双目视觉系统进一步改进的方向。
技术实现要素:
3.本发明专利要解决的技术问题在于,针对现有技术的上述缺陷,提供了一种结构参数可调的双目视觉系统,能够在不增大系统体积的同时一定范围内的调节系统基线长度与相机光轴与基线之间的角度。
4.本发明解决技术问题采用了下述技术方案:
5.一种结构参数可调的双目视觉系统,包括:第一反射镜、第二反射镜、第一ccd相机、第二ccd相机、四个旋转平台、驱动模块、上位机,所述上位机连接驱动模块,所述驱动模块分别连接四个旋转平台和第一ccd相机、第二ccd相机,所述第一反射镜、第二反射镜、第一ccd相机、第二ccd相机分别安装于四个旋转平台上,所述第一反射镜中心、第二反射镜中心、第一ccd相机光心、第二ccd相机光心均在同一轴线上,所述第一反射镜、第二反射镜、第一ccd相机、第二ccd相机均能水平转动,从第一反射镜中心、第二反射镜中心、第一ccd相机光心、第二ccd相机光心所在轴线一端到另一端放置顺序依次为第一反射镜、第一ccd相机、第二ccd相机、第二反射镜,所述第一反射镜中心与第一ccd相机光心之间距离为40cm,所述第一ccd相机光心与第二ccd相机光心之间距离为20cm,所述第二ccd相机光心与第二反射镜中心之间距离为40cm,所述第一反射镜反射面与第一反射镜中心、第二反射镜中心、第一ccd相机光心、第二ccd相机光心所在轴线呈45
°
角,所述第二反射镜反射面所在平面与第一
反射镜反射面所在平面呈90
°
角,所述第一ccd相机探测面朝向第一反射镜反射面,所述第二ccd相机探测面朝向第二反射镜反射面,所述第一ccd相机探测面与第一反射镜中心、第二反射镜中心、第一ccd相机光心、第二ccd相机光心所在轴线呈36
°
角,第一ccd相机探测面所在平面与第二ccd相机探测面所在平面呈108
°
角。
6.所述第一反射镜和第二反射镜旋转角度为
±
22.5
°
。
7.所述第一ccd相机和第二ccd相机旋转角度为
±9°
。
8.所述第一反射镜与第二反射镜直径38.1mm,厚度3mm。
9.所述第一ccd相机与第二ccd相机像面尺寸2/3英寸,全分辨率帧速30fps,分辨率1360
×
1024,机械尺寸53.3mm
×
33mm
×
86mm。
10.所述四个旋转平台为由步进电机驱动的中空旋转平台,减速比10/18。
11.有益效果:
12.(1)采用了光学方法调节系统基线长度,能够在不增大系统体积的同时增大系统的基线长度,该系统可将系统基线长度最大调节为156.56cm,即最大调节为两相机光心间距的7.828倍,两反射镜中心间距的1.5656倍,提高了系统的探测距离和成像精度。
13.(2)采用了反射镜与ccd相机各自独立旋转调节的方式,能够使系统基线长度改变的同时相机光轴与基线之间的角度始终处于30
°
~45
°
范围内,提高了系统的成像精度。
附图说明
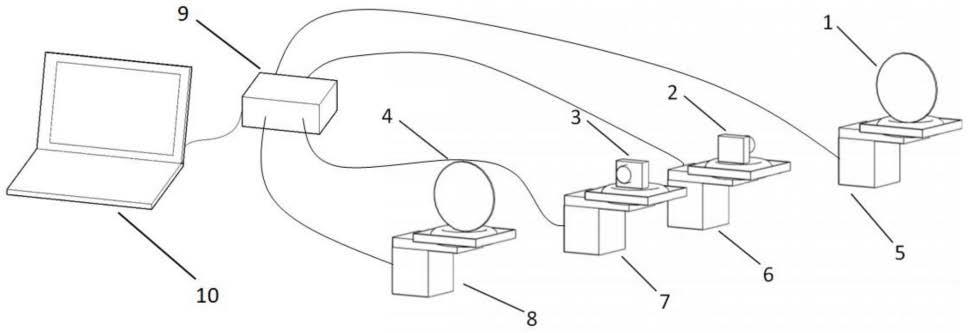
14.图1为本发明的一种结构参数可调的双目视觉系统的系统结构示意图。
15.图2为本发明的一种结构参数可调的双目视觉系统的反射镜与相机摆放位置俯视示意图。
16.图3为本发明的一种结构参数可调的双目视觉系统的结构参数调节原理示意图。
17.1-第一反射镜;2-第一ccd相机;3-第二ccd相机;4-第二反射镜;5-第一旋转平台;6-第二旋转平台;7-第三旋转平台;8-第四旋转平台;9-驱动模块;10-上位机。
具体实施方式
18.如图1,一种结构参数可调的双目视觉系统,包括:第一反射镜1、第二反射镜4、第一ccd相机2、第二ccd相机3、第一旋转平台5、第二旋转平台6、第三旋转平台7、第四旋转平台8、驱动模块9、上位机10,所述第一反射镜1与第二反射镜4直径38.1mm,厚度3mm,所述第一ccd相机2与第二ccd相机3像面尺寸2/3英寸,全分辨率帧速30fps,分辨率1360
×
1024,机械尺寸53.3mm
×
33mm
×
86mm,所述第一旋转平台5、第二旋转平台6、第三旋转平台7、第四旋转平台8为由步进电机驱动的中空旋转平台,减速比10/18,所述上位机10连接驱动模块9,所述驱动模块9分别连接四个旋转平台5、6、7、8和第一ccd相机2、第二ccd相机3,所述驱动模块9驱动四个旋转平台5、6、7、8旋转且包含连接第一ccd相机2和第二ccd相机3的连接器,并将第一ccd相机2和第二ccd相机3测得数据传回上位机10,所述第一反射镜1安装于第一旋转平台5上,所述第二反射镜4安装于第四旋转平台8上,所述第一ccd相机2安装于第二旋转平台6上,所述第二ccd相机3安装于第三旋转平台7上,所述第一反射镜1中心、第二反射镜4中心、第一ccd相机2光心、第二ccd相机3光心均在同一轴线上,所述第一反射镜1和第二反射镜4能水平转动,旋转角度范围为
±
22.5
°
,所述第一ccd相机2和第二ccd相机3也能够
水平转动,旋转角度范围为
±9°
,从第一反射镜1中心、第二反射镜4中心、第一ccd相机2光心、第二ccd相机3光心所在轴线一端到另一端放置顺序依次为第一反射镜1、第一ccd相机2、第二ccd相机3、第二反射镜4,所述第一反射镜1中心与第一ccd相机2光心之间距离为40cm,所述第一ccd相机2光心与第二ccd相机3光心之间距离为20cm,所述第二ccd相机3光心与第二反射镜4中心之间距离为40cm,所述第一反射镜1反射面与第一反射镜1中心、第二反射镜4中心、第一ccd相机2光心、第二ccd相机3光心所在轴线呈45
°
角,所述第二反射镜4反射面所在平面与第一反射镜1反射面所在平面呈90
°
角,所述第一ccd相机2探测面朝向第一反射镜1反射面,所述第二ccd相机3探测面朝向第二反射镜4反射面,所述第一ccd相机2探测面与第一反射镜1中心、第二反射镜4中心、第一ccd相机2光心、第二ccd相机3光心所在轴线呈36
°
角,第一ccd相机2探测面所在平面与第二ccd相机3探测面所在平面呈108
°
角。
19.如图2,本系统中第一反射镜1、第二反射镜4、第一ccd相机2、第二ccd相机3沿过两相机2,3光心之间连线的垂直平分线对称,且在系统调节时第一反射镜1和第二反射镜4协同调节,第一ccd相机2和第二ccd相机3协同调节,调节后的系统也保持此轴对称关系,本系统中两ccd相机2,3通过分别对两反射镜成虚像的方式,采用两ccd相机2,3虚像镜头的光心连线作为系统的基线,随着两ccd相机2,3旋转角度的不同,两ccd相机2,3虚像的位置及其之间的距离也将发生变化,所以基线长度也随之改变,当两反射镜1,4均向系统对称轴转动22.5
°
时,形成的基线长度达到最大为156.56cm,在测量时先通过第一反射镜1和第二反射镜4调节好系统基线长度,后通过第一ccd相机2和第二ccd相机3各自独立旋转相同的角度调整相机光轴与系统基线间的夹角,在两相机2,3向系统对称轴转动9
°
或反方向转动6
°
之间,此夹角保持在30
°
~45
°
之间,除此之外调节两ccd相机2,3的目的在于使得在该基线长度与反射镜角度下两ccd相机2,3重合视场最大,这样以来,便可以根据实际探测情况调整基线长度和相机光轴与基线间夹角,提升系统成像精度,使系统成像效果更好。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1