激光雷达接收镜头的制作方法
1.本发明涉及成像镜头的技术领域,特别涉及一种激光雷达接收镜头。
背景技术:
2.随着汽车的智能驾驶的发展,车载镜头也在飞速的更新迭代。车载摄像头由于其清晰的成像的受到自动驾驶技术的青睐,可是其容易受强光、天黑、雨雪等因素干扰,且数据形式在感知层面上存在不足,此时智能驾驶系统通过搭载激光雷达系统对接收信息进行补充显得是有必要的。
3.激光雷达系统作为雷达概念的一种延伸,利用激光进行目标探测,从反射光中获取目标光波信号,与发射信号共同进行信息处理来获得探测目标的距离、速度、方位等信息。光学镜头是激光雷达的重要组成部分,在激光雷达的发射部分需要使用光学镜头来准直光束,在接收部分需要光学镜头来接收光束能量。
4.当前市场上大部分激光雷达接收镜头探测距离都相对较短,且能到达光学系统的能量比较弱,为此需一款能探测远距离,激光能量强的镜头。
技术实现要素:
5.针对上述问题,本发明的目的在于提出一种激光雷达接收镜头,具有大光圈、长焦距、小口径的优点,同时能提供高清晰的成像效果,能够提高对较远距离目标的成像品质和识别准确率。
6.为实现上述目的,本发明的技术方案如下:一种激光雷达接收镜头,从物侧到像侧依次包括:具有正光焦度的第一透镜组;具有正光焦度的第二透镜组;光阑;具有正光焦度的第三透镜组;所述第一透镜组的组合焦距fa与所述第二透镜组的组合焦距fb满足:1.2<fa/fb<1.9;所述第二透镜组的组合焦距fb与所述第三透镜组的组合焦距fc满足:0.8<fb/fc<1.4。
7.较佳地,所述激光雷达接收镜头的光学总长ttl与最大视场角所对应的真实像高ih满足:20<ttl/ih<30。
8.较佳地,所述第一透镜组从物侧到像侧依次包括:具有正光焦度的第一透镜,其物侧面为凸面;具有负光焦度的第二透镜,其物侧面为凹面;具有正光焦度的第三透镜,其物侧面为凸面,像侧面为凹面。
9.较佳地,所述第二透镜组从物侧到像侧依次包括:
具有正光焦度的第四透镜,其物侧面为凹面,像侧面为凸面;具有正光焦度的第五透镜,其物侧面为凹面,像侧面为凸面。
10.较佳地,所述第三透镜组从物侧到像侧依次包括:具有正光焦度的第六透镜,其物侧面和像侧面均为凸面;具有正光焦度的第七透镜,其物侧面为凸面,像侧面为凹面;具有光焦度的第八透镜。
11.较佳地,所述第一透镜物侧面有效口径d与最大视场角所对应的真实像高ih满足:d/ih≤4.5。
12.较佳地,所述激光雷达接收镜头最大视场角所对应的真实像高ih与所述第一透镜组最大视场角所对应的真实像高iha满足:0.95<iha/ih<1.05。
13.较佳地,所述第一透镜组的组合焦距fa与所述第一透镜的焦距f1、所述第二透镜的焦距f2、所述第三透镜的焦距f3分别满足:1.1<f1/fa<1.7;-3.0<f2/fa<-1.2;1.2<f3/fa<1.5。
14.较佳地,所述第二透镜组的组合焦距fb与所述第四透镜的焦距f4、所述第五透镜的焦距f5分别满足:0.5<f4/fb<1.5;1.8<f5/fb<2.8。
15.较佳地,所述第三透镜组的组合焦距fc与所述第六透镜的焦距f6、所述第七透镜的焦距f7、所述第八透镜的焦距f8分别满足:1.5<f6/fc<2.0;1.2<f7/fc<2.0;|f8/fc|<6.0。
16.相较于现有技术,本发明的有益效果是:本技术的激光雷达接收镜头通过合理搭配三个透镜组的光焦度,探测物反射的光线在镜头内二次成像的方式,能够提高镜头对100m外光线收集能力的同时,也有较小的fno和口径。以及第二透镜组及第三透镜组对首次成像的反射光线像差进行矫正,使所述激光雷达接收镜头的畸变得到了很好的矫正。
17.本发明的附加方面与优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
18.本发明的上述与/或附加的方面与优点从结合下面附图对实施例的描述中将变得明显与容易理解,其中:图1为本发明实施例1的激光雷达接收镜头的结构示意图。
19.图2为本发明实施例1中激光雷达接收镜头的f-tanθ畸变曲线图。
20.图3为本发明实施例1中激光雷达接收镜头的相对照度曲线图。
21.图4为本发明实施例1中激光雷达接收镜头的几何圈入能量曲线图。
22.图5为本发明实施例2的激光雷达接收镜头的结构示意图。
23.图6为本发明实施例2中激光雷达接收镜头的f-tanθ畸变曲线图。
24.图7为本发明实施例2中激光雷达接收镜头的相对照度曲线图。
25.图8为本发明实施例2中激光雷达接收镜头的几何圈入能量曲线图。
26.图9为本发明实施例3的激光雷达接收镜头的结构示意图。
27.图10为本发明实施例3中激光雷达接收镜头的f-tanθ畸变曲线图。
28.图11为本发明实施例3中激光雷达接收镜头的相对照度曲线图。
29.图12为本发明实施例3中激光雷达接收镜头的几何圈入能量曲线图。
30.图13为本发明实施例4的激光雷达接收镜头的结构示意图。
31.图14为本发明实施例4中激光雷达接收镜头的f-tanθ畸变曲线图。
32.图15为本发明实施例4中激光雷达接收镜头的相对照度曲线图。
33.图16为本发明实施例4中激光雷达接收镜头的几何圈入能量曲线图。
34.如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
35.为了更好地理解本技术,将参考附图对本技术的各个方面做出更详细的说明。应理解,这些详细说明只是对本技术的实施例的描述,而非以任何方式限制本技术的范围。在说明书全文中,相同的附图标号指代相同的元件。表述“和/或”包括相关联的所列项目中的一个或多个的任何和全部组合。
36.应注意,在本说明书中,第一、第二、第三等的表述仅用于将一个特征与另一个特征区分开来,而不表示对特征的任何限制。因此,在不背离本发明的教导的情况下,下文中讨论的第一透镜也可被称作第二透镜或第三透镜。
37.在附图中,为了便于说明,已稍微夸大了透镜的厚度、尺寸和形状。具体来讲,附图中所示的球面或非球面的形状通过示例的方式示出。即,球面或非球面的形状不限于附图中示出的球面或非球面的形状。附图仅为示例而并非严格按比例绘制。
38.在本文中,近轴区域是指光轴附近的区域。若透镜表面为凸面且未界定该凸面位置时,则表示该透镜表面至少于近轴区域为凸面;若透镜表面为凹面且未界定该凹面位置时,则表示该透镜表面至少于近轴区域为凹面。每个透镜最靠近被摄物体的表面称为该透镜的物侧面,每个透镜最靠近成像面的表面称为该透镜的像侧面。
39.还应理解的是,用语“包括”、“包括有”、“具有”、“包含”和/或“包含有”,当在本说明书中使用时表示存在所陈述的特征、元件和/或部件,但不排除存在或附加有一个或多个其它特征、元件、部件和/或它们的组合。此外,当诸如“...中的至少一个”的表述出现在所列特征的列表之后时,修饰整个所列特征,而不是修饰列表中的单独元件。此外,当描述本技术的实施方式时,使用“可”表示“本技术的一个或多个实施方式”。并且,用语“示例性的”旨在指代示例或举例说明。
40.除非另外限定,否则本文中使用的所有用语(包括技术用语和科学用语)均具有与本技术所属领域普通技术人员的通常理解相同的含义。还应理解的是,用语(例如在常用词典中定义的用语)应被解释为具有与它们在相关技术的上下文中的含义一致的含义,并且将不被以理想化或过度正式意义解释,除非本文中明确如此限定。
41.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
42.根据本技术实施例的激光雷达接收镜头从物侧到像侧依次包括:具有正光焦度的第一透镜组a,具有正光焦度的第二透镜组b,光阑st,具有正光焦度的第三透镜组c。
43.在一些实施例中,第二透镜组和第三透镜组之间可设置用于限制光束的光阑,能够减少激光雷达接收镜头像散的产生,并且有利于收束进入光学系统的光线,提升成像品质。
44.在一些实施例中,激光雷达接收镜头的光学总长ttl与最大视场角所对应的真实像高ih满足:20<ttl/ih<30。满足上述范围,可以有效地限制激光雷达接收镜头的长度,有利于实现激光雷达接收镜头小型化。
45.在一些实施例中,第一透镜物侧面有效口径d与最大视场角所对应的真实像高ih满足:d/ih≤4.5。满足上述范围,可以有效地限制激光雷达接收镜头的前端口径,有利于实现激光雷达接收镜头小型化。
46.在一些实施例中,激光雷达接收镜头的入瞳直径epd与最大视场角所对应的真实像高ih满足:3.7<epd/ih。满足上述范围,能够使得射入激光雷达接收镜头的光线束的宽度变大,使得激光雷达接收镜头在像面处亮度得到提升避免暗角的产生。
47.在一些实施例中,激光雷达接收镜头最大视场角所对应的真实像高ih与第一透镜组最大视场角所对应的真实像高iha满足:0.95<iha/ih<1.05。满足上述范围,能够有效降低激光雷达接收镜头的畸变,提升成像品质。
48.在一些实施例中,激光雷达接收镜头的光学后焦bfl与最大视场角所对应的真实像高ih满足:0.7<bfl/ih。满足上述范围,有利于在取得良好地成像品质与易于装配地光学后焦距长度之间取得平衡,保证激光雷达接收镜头成像品质的同时,降低摄像头模组装配工艺难度。
49.在一些实施例中,第一透镜组的组合焦距fa与第二透镜组的组合焦距fb满足:1.2<fa/fb<1.9;第二透镜组的组合焦距fb与第三透镜组的组合焦距fc满足:0.8<fb/fc<1.4。满足上述范围,能够合理分配各透镜组的焦距,提升成像质量。
50.在一些实施例中,第一透镜组与第二透镜组之间的中心间距ct
ab
满足:ct
ab
<19.0 (mm)。满足上述范围,能够缩短激光雷达接收镜头的光学总长,同时还能增强对于远距离的反射光线的收集能力。
51.在一些实施例中,第一透镜组的组合焦距fa与第一透镜的焦距f1、第二透镜的焦距f2、第三透镜的焦距f3分别满足:1.1<f1/fa<1.7;-3.0<f2/fa<-1.2;1.2<f3/fa<1.5。满足上述范围,能够通过合理搭配第一透镜组的各透镜的焦距,让接收到的光线经第一透镜组后首次聚焦成像,减少后续透镜组对该像再次成像的焦距。
52.在一些实施例中,第二透镜组的组合焦距fb与第四透镜的焦距f4、第五透镜的焦距f5分别满足:0.5<f4/fb<1.5;1.8<f5/fb<2.8。满足上述范围,能够对经过第一透镜组后首次成像的各类像差进行矫正,提升成像质量。
53.在一些实施例中,第三透镜组的组合焦距fc与第六透镜的焦距f6、第七透镜的焦距f7、第八透镜的焦距f8分别满足:1.5<f6/fc<2.0;1.2<f7/fc<2.0;|f8/fc|<6.0。满足上述范围,能够将经过第二透镜组放大的图像汇聚,同时矫正激光雷达接收镜头的各类像差,提升成像质量。
54.为使系统具有更好的光学性能,镜头中采用多片非球面透镜,所述光学镜头的各非球面表面形状满足下列方程:;其中,z为曲面与曲面顶点在光轴方向的距离,h为光轴到曲面的距离,c为曲面顶点的曲率,k为二次曲面系数,a、b、c、d、e分别为二阶、四阶、六阶、八阶、十阶曲面系数。
55.下面分多个实施例对本发明进行进一步的说明。在各个实施例中,光学镜头中的各个透镜的厚度、曲率半径、材料选择部分有所不同,具体不同可参见各实施例的参数表。下述实施例仅为本发明的较佳实施方式,但本发明的实施方式并不仅仅受下述实施例的限制,其他的任何未背离本发明创新点所作的改变、替代、组合或简化,都应视为等效的置换方式,都包含在本发明的保护范围之内。
56.实施例1请参阅图1,所示为本发明实施例1中提供的激光雷达接收镜头的结构示意图,该激光雷达接收镜头沿光轴从物侧到成像面依次包括:具有正光焦度的第一透镜组a,具有正光焦度的第二透镜组b,光阑st,具有正光焦度的第三透镜组c。
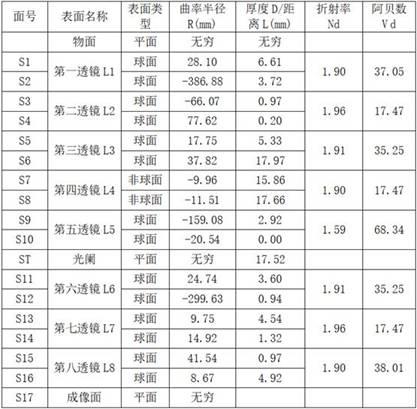
57.其中,第一透镜组a沿光轴从物侧到成像面依次包括:具有正光焦度的第一透镜l1,其物侧面s1和像侧面s2均为凸面;具有负光焦度的第二透镜l2,其物侧面s3和像侧面s4均为凹面;具有正光焦度的第三透镜l3,其物侧面s5为凸面,像侧面s6为凹面;其中,第二透镜组b沿光轴从物侧到成像面依次包括:具有正光焦度的第四透镜l4,其物侧面s7为凹面,像侧面s8为凸面;具有正光焦度的第五透镜l5,其物侧面s9为凹面,像侧面s10为凸面;其中,第三透镜组c沿光轴从物侧到成像面依次包括:具有正光焦度的第六透镜l6,其物侧面s11和像侧面s12均为凸面;具有正光焦度的第七透镜l7,其物侧面s13为凸面,像侧面s14为凹面;具有正光焦度的第八透镜l8,其物侧面s15为凸面,像侧面s16为凹面;成像面s17为平面。
58.实施例1中的光学镜头中各透镜的相关参数如表1-1所示。
59.表 1-1
实施例1中的光学镜头的非球面透镜的面型参数如表1-2所示。
60.表 1-2在本实施例中,光学镜头的f-tanθ畸变曲线图、相对照度曲线图、几何圈入能量曲线图分别如图2、图3、图4所示。
61.图2示出了实施例1的f-tanθ畸变曲线,其表示不同波长的光线在成像面上不同像高处的f-tanθ畸变,横轴表示f-tanθ畸变(单位:%),纵轴表示半视场角(单位:
°
)。从图中可以看出,激光雷达接收镜头的f-tanθ畸变控制在4%以内,说明激光雷达接收镜头能够良好地矫正f-tanθ畸变。
62.图3示出了实施例1的相对照度曲线,其表示成像面上不同视场角度的相对照度值,横轴表示半视场角(单位:
°
),纵轴表示相对照度(单位:%)。从图中可以看出,激光雷达接收镜头的相对照度值大于80%,说明激光雷达接收镜头具有极好地相对照度。
63.图4示出了实施例1的几何圈入能量曲线图,其表示最大半视场下光斑能量的集中程度,横轴表示距离质心的半径(单位:μm),纵轴表示归一化圈入能量值。从图中可以看出,激光雷达接收镜头距离质心15μm处的几何圈入能量在90%以上,说明激光镜头具有极好的能量集中度。
64.实施例2请参阅图5,所示为本发明实施例2中提供的激光雷达接收镜头的结构示意图,该激光雷达接收镜头沿光轴从物侧到成像面依次包括:具有正光焦度的第一透镜组a,具有正光焦度的第二透镜组b,光阑st,具有正光焦度的第三透镜组c。
65.其中,第一透镜组a沿光轴从物侧到成像面依次包括:具有正光焦度的第一透镜l1,其物侧面s1和像侧面s2均为凸面;具有负光焦度的第二透镜l2,其物侧面s3和像侧面s4均为凹面;具有正光焦度的第三透镜l3,其物侧面s5为凸面,像侧面s6为凹面;其中,第二透镜组b沿光轴从物侧到成像面依次包括:具有正光焦度的第四透镜l4,其物侧面s7为凹面,像侧面s8为凸面;具有正光焦度的第五透镜l5,其物侧面s9为凹面,像侧面s10为凸面;其中,第三透镜组c沿光轴从物侧到成像面依次包括:具有正光焦度的第六透镜l6,其物侧面s11和像侧面s12均为凸面;具有正光焦度的第七透镜l7,其物侧面s13为凸面,像侧面s14为凹面;具有正光焦度的第八透镜l8,其物侧面s15为凸面,像侧面s16为凹面;成像面s17为平面。
66.实施例2中的光学镜头中各透镜的相关参数如表2-1所示。
67.表 2-1实施例2中的光学镜头的非球面透镜的面型参数如表2-2所示。
68.表 2-2在本实施例中,光学镜头的f-tanθ畸变曲线图、相对照度曲线图、几何圈入能量曲线图分别如图6、图7、图8所示。
69.图6示出了实施例1的f-tanθ畸变曲线,其表示不同波长的光线在成像面上不同像
高处的f-tanθ畸变,横轴表示f-tanθ畸变(单位:%),纵轴表示半视场角(单位:
°
)。从图中可以看出,激光雷达接收镜头的f-tanθ畸变控制在4%以内,说明激光雷达接收镜头能够良好地矫正f-tanθ畸变。
70.图7示出了实施例1的相对照度曲线,其表示成像面上不同视场角度的相对照度值,横轴表示半视场角(单位:
°
),纵轴表示相对照度(单位:%)。从图中可以看出,激光雷达接收镜头的相对照度值大于80%,说明激光雷达接收镜头具有极好地相对照度。
71.图8示出了实施例1的几何圈入能量曲线图,其表示最大半视场下光斑能量的集中程度,横轴表示距离质心的半径(单位:μm),纵轴表示归一化圈入能量值。从图中可以看出,激光雷达接收镜头距离质心15μm处的几何圈入能量在90%以上,说明激光镜头具有极好的能量集中度。
72.实施例3请参阅图9,所示为本发明实施例3中提供的激光雷达接收镜头的结构示意图,该激光雷达接收镜头沿光轴从物侧到成像面依次包括:具有正光焦度的第一透镜组a,具有正光焦度的第二透镜组b,光阑st,具有正光焦度的第三透镜组c。
73.其中,第一透镜组a沿光轴从物侧到成像面依次包括:具有正光焦度的第一透镜l1,其物侧面s1为凸面,像侧面s2为凹面;具有负光焦度的第二透镜l2,其物侧面s3为凹面,像侧面s4为凸面;具有正光焦度的第三透镜l3,其物侧面s5为凸面,像侧面s6为凹面;其中,第二透镜组b沿光轴从物侧到成像面依次包括:具有正光焦度的第四透镜l4,其物侧面s7为凹面,像侧面s8为凸面;具有正光焦度的第五透镜l5,其物侧面s9为凹面,像侧面s10为凸面;其中,第三透镜组c沿光轴从物侧到成像面依次包括:具有正光焦度的第六透镜l6,其物侧面s11和像侧面s12均为凸面;具有正光焦度的第七透镜l7,其物侧面s13为凸面,像侧面s14为凹面;具有正光焦度的第八透镜l8,其物侧面s15和像侧面s16均为凹面;成像面s17为平面。
74.实施例3中的光学镜头中各透镜的相关参数如表3-1所示。
75.表 3-1
实施例3中的光学镜头的非球面透镜的面型参数如表3-2所示。
76.表 3-2在本实施例中,光学镜头的f-tanθ畸变曲线图、相对照度曲线图、几何圈入能量曲线图分别如图10、图11、图12所示。
77.图10示出了实施例3的f-tanθ畸变曲线,其表示不同波长的光线在成像面上不同像高处的f-tanθ畸变,横轴表示f-tanθ畸变(单位:%),纵轴表示半视场角(单位:
°
)。从图中可以看出,激光雷达接收镜头的f-tanθ畸变控制在7%以内,说明激光雷达接收镜头能够较好地矫正f-tanθ畸变。
78.图11示出了实施例3的相对照度曲线,其表示成像面上不同视场角度的相对照度值,横轴表示半视场角(单位:
°
),纵轴表示相对照度(单位:%)。从图中可以看出,激光雷达接收镜头的相对照度值大于90%,说明激光雷达接收镜头具有极好地相对照度。
79.图12示出了实施例3的几何圈入能量曲线图,其表示最大半视场下光斑能量的集中程度,横轴表示距离质心的半径(单位:μm),纵轴表示归一化圈入能量值。从图中可以看出,激光雷达接收镜头距离质心15μm处的几何圈入能量在90%以上,说明激光镜头具有极好的能量集中度。
80.实施例4请参阅图13,所示为本发明实施例4中提供的激光雷达接收镜头的结构示意图,该激光雷达接收镜头沿光轴从物侧到成像面依次包括:具有正光焦度的第一透镜组a,具有正光焦度的第二透镜组b,光阑st,具有正光焦度的第三透镜组c。
81.其中,第一透镜组a沿光轴从物侧到成像面依次包括:具有正光焦度的第一透镜l1,其物侧面s1为凸面,像侧面s2为平面;具有负光焦度的第二透镜l2,其物侧面s3为凹面,像侧面s4为凸面;具有正光焦度的第三透镜l3,其物侧面s5为凸面,像侧面s6为凹面;其中,第二透镜组b沿光轴从物侧到成像面依次包括:具有负光焦度的第九透镜l9,其物侧面s18和像侧面s19均为凹面;具有正光焦度的第四透镜l4,其物侧面s7为凹面,像侧面s8为凸面;具有正光焦度的第五透镜l5,其物侧面s9为凹面,像侧面s10为凸面;其中,第三透镜组c沿光轴从物侧到成像面依次包括:具有正光焦度的第六透镜l6,其物侧面s11和像侧面s12均为凸面;具有正光焦度的第七透镜l7,其物侧面s13为凸面,像侧面s14为凹面;具有正光焦度的第八透镜l8,其物侧面s15为凹面,像侧面s16为凸面;成像面s17为平面。
82.实施例4中的光学镜头中各透镜的相关参数如表4-1所示。
83.表 4-1实施例4中的光学镜头的非球面透镜的面型参数如表4-2所示。
84.表 4-2
在本实施例中,光学镜头的f-tanθ畸变曲线图、相对照度曲线图、几何圈入能量曲线图分别如图14、图15、图16所示。
85.图14示出了实施例4的f-tanθ畸变曲线,其表示不同波长的光线在成像面上不同像高处的f-tanθ畸变,横轴表示f-tanθ畸变(单位:%),纵轴表示半视场角(单位:
°
)。从图中可以看出,激光雷达接收镜头的f-tanθ畸变控制在
±
10%以内,说明激光雷达接收镜头能够较好地矫正f-tanθ畸变。
86.图15示出了实施例4的相对照度曲线,其表示成像面上不同视场角度的相对照度值,横轴表示半视场角(单位:
°
),纵轴表示相对照度(单位:%)。从图中可以看出,激光雷达接收镜头的相对照度值大于90%,说明激光雷达接收镜头具有极好地相对照度。
87.图16示出了实施例4的几何圈入能量曲线图,其表示最大半视场下光斑能量的集中程度,横轴表示距离质心的半径(单位:μm),纵轴表示归一化圈入能量值。从图中可以看出,激光雷达接收镜头距离质心15μm处的几何圈入能量达到100%,说明激光镜头具有极好的能量集中度。
88.请参阅表5,为上述各实施例对应的光学特性,包括所述光学镜头的有效焦距f、光学总长ttl、光圈值fno、真实像高ih以及最大视场角fov以及与所述实施例中每个条件式对应的数值。
89.表 5
综上所述,本发明实施例的激光雷达接收镜头通过合理搭配三个透镜组的光焦度,探测物反射的光线在镜头内二次成像的方式,能够提高镜头对100m外光线收集能力的同时,也有较小的fno和口径。以及第二透镜组及第三透镜组对首次成像的反射光线像差进行矫正,使所述激光雷达接收镜头的畸变得到了很好的矫正。
90.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
91.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体与详细,但并不能因此而理解为对本发明范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形与改进,这些都属于本发明的保护范围。因此,本发明的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1