一种基于改进粒子群算法的光束整形方法
1.本发明涉及激光光束整形领域,具体涉及一种基于改进粒子群算法的光束整形方法。
背景技术:
2.光束整形技术可调整激光光束的空间分布,得到特定光强分布的目标光束,在激光加工、原子捕获、惯性约束核聚变及光学成像系统等领域具有重要的应用价值。目前,光束整形技术主要基于固定光学元件和自适应波前校正器件。前者包括非球面透镜组、衍射光学元件和长焦深整形元件,整形参数固定,只能输出特定的光强分布,灵活性较差,难以实现动态整形。后者包括双折射透镜组、液晶空间光调制器、变形反射镜,以变形镜为例,其镜面灵活可调控,可构造光束整形所需的波前相位,实现实时光束整形。其中,获取目标光束光强分布所对应的近场调制相位是纯相位调制激光光束整形技术的关键。相比于传统方法,优化算法无需解微分方程等大量的数值计算即可得到光束整形所需的结构参数,如gs算法。但gs算法对初始值非常敏感,易陷入局部极值点。而粒子群算法,也称粒子群优化算法(particle swarm optimization),缩写为pso,是近年来发展起来的一种新的进化算法(evolutionary algorithm-ea)。pso算法属于进化算法的一种,它是从随机解出发,通过迭代寻找最优解,通过适应度来评价解的品质,它通过追随当前搜索到的最优值来寻找全局最优。这种算法以其实现容易、精度高、收敛快等优点引起了学术界的重视,并且在解决实际问题中展示了其优越性。
3.因此,我们利用粒子群算法的优越性,提出一种基于改进粒子群算法的光束整形方法,以泽尼克系数作为粒子群算法的粒子位置向量,基于输出光束与目标光束光强分布的均方根误差来设计粒子群算法的适应度函数,通过粒子群算法迭代求解得到远场目标光束所对应的近场相位分布。
4.本方法基于改进的粒子群算法,可优化得到光束整形所需近场相位分布的纯相位全息图,方便使用液晶空间光调制器等相位调制元件来实现,完成一些特定形状的振幅光束整形,如环形、方形等;整形算法收敛速度快,方法新颖,简便实用,整形效果较好。
技术实现要素:
5.本发明要解决的技术问题是:现有光束整形技术中存在整形形状受到一定限制以及整形算法较为复杂的问题,需要一种整形形状不受限制,整形算法简单新颖,收敛速度快,整形效果好的光束整形方法。
6.本发明要解决其技术问题所采用的技术方案是:一种基于改进粒子群算法的光束整形方法。以泽尼克系数作为粒子群算法的粒子位置向量,基于输出光束与目标光束光强分布的均方根误差来设计粒子群算法的适应度函数,通过粒子群算法迭代求解得到远场目标光束所对应的近场相位分布。将此相位分布加载到相位调制器件中,完成目标光束整形。
7.具体实现步骤如下:
8.步骤(1)、设置光束整形参数,包括激光光束的直径、波长、相位、振幅,确定输入光束的复振幅,确定目标光束的光强分布。
9.目标光束的光强分布若具有完全对称性,则在改进的粒子群算法中,可选取具有完全对称性的泽尼克多项式的特定项数作为粒子位置向量。
10.步骤(2)、根据纯相位调制激光光束整形理论,基于改进的粒子群算法得到目标光束所对应的近场相位分布。
11.改进的粒子群算法,具体流程如下:
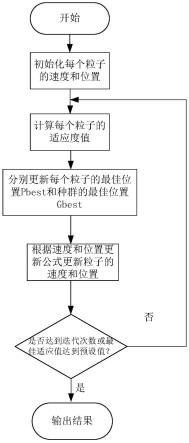
12.步骤(2.1)、随机初始化种群,初始化每个粒子的速度和位置,设置迭代次数、种群数量、惯性权重和学习因子。
13.步骤(2.2)、根据适应度函数计算每个粒子的适应度值。
14.步骤(2.3)、分别更新每个粒子的最佳位置pbest和种群的最佳位置gbest。
15.步骤(2.4)、根据速度和位置更新公式更新每个粒子的速度和位置。
16.步骤(2.5)、判断是否达到迭代次数或者最佳适应值是否达到预设值,如未达到则返回步骤(2.2),否则输出结果并结束运行。
17.改进粒子群算法的迭代过程中包含两个变异策略,分别是选中的粒子被重新初始化位置速度和选中的粒子增加随机扰动,以保持粒子群的多样性和改进算法性能。
18.改进的粒子群算法中,以泽尼克多项式系数作为粒子位置向量,以输出光束与目标光束光强分布的均方根差作为适应度函数。
19.步骤(3)、将得到的相位分布作为光束整形所需的调制相位,加载到相位调制器件中,完成目标光束整形。
20.相位调制器件包括液晶空间光调制器和变形反射镜。
21.本发明的原理是:根据纯相位调制激光光束整形理论可知,输入光束经过相位调制器件之后,再经过透镜聚焦可得到整形后的聚焦光斑。根据角谱衍射理论,透镜对光束的聚焦在数学上表现为傅里叶变换,焦平面处的光强分布可表示为其复振幅的平方。因此,通过改变输入光束的相位为目标光束所对应的近场调制相位即可实现光束整形。通过改进的粒子群算法可快速迭代求解得到目标光束所需的近场调制相位分布,故而基于改进粒子群算法可实现一种新的光束整形方法。
22.本发明与现有技术相比具有如下优点:本方法基于改进的粒子群算法进行光束整形,相比于传统光束整形方法具有方法简单新颖、整形收敛速度快,整形效果较好,整形形状不受限制等优点,尤其对一些具有对称性的目标光束整形,本方法以泽尼克系数作为粒子群算法的粒子位子向量,可快速得到目标光束所对应的近场相位分布,实现对称性目标光束的高效整形。
附图说明
23.图1为本发明的一种基于改进粒子群算法的光束整形方法的流程图;
24.图2为本发明的一种基于改进粒子群算法的光束整形方法中的算法迭代过程;
25.图3为本发明的一种基于改进粒子群算法的光束整形方法中得到的近场调制相位;
26.图4为本发明的一种基于改进粒子群算法的光束整形方法中的目标环形光束和整
形得到光束,其中,图4(a)为目标环形光束,图4(b)为整形得到的光束。
具体实施方式
27.下面结合附图以及具体实施方式进一步说明本发明。
28.本发明的一种基于改进粒子群算法的光束整形方法的具体实施方法如下:
29.步骤(1)、设置光束整形参数,包括激光光束的直径、波长、相位、振幅,确定输入光束的复振幅,确定目标光束的光强分布。本实施例中,采用的激光光束为高斯光束,直径为4mm,波长为635nm,目标光束为环形光束,环形光束的数学表达式为:
[0030][0031]
式中圆环直径d为0.4mm,圆环宽度h为0.08mm,i
target
(x,y)为目标光束在焦平面处的光强分布,(x,y)为远场焦平面坐标。
[0032]
由于环形光束在光强分布上具有完全对称性,因此选取泽尼克多项式中具有完全对称性的第4项(离焦)、第12项(一阶球差)、第24项(二阶球差)和第40项(三阶球差)的系数作为改进粒子群算法中的粒子位置向量。
[0033]
步骤(2)、根据纯相位调制激光光束整形理论,基于改进的粒子群算法得到目标光束所对应的近场相位分布。
[0034]
改进的粒子群算法,具体流程如下:
[0035]
步骤(2.1)、随机初始化种群,初始化每个粒子的速度和位置,设置迭代次数、种群数量、惯性权重和学习因子。如图1所示,为本发明改进的粒子群算法的光束整形方法的流程图。本实施例中,粒子群数量为40,迭代次数为200次,惯性权重初始值为1,惯性权重递减比为0.99,学习因子为2。
[0036]
步骤(2.2)、根据适应度函数计算每个粒子的适应度值。适应度函数为输出光束与目标光束光强分布的均方根差,适应度函数公式为:
[0037][0038]
式中i
out
(x,y)为输出光束在焦平面处的光强分布,f反映实际输出光束光强分布与目标光束光强分布的偏差。
[0039]
步骤(2.3)、分别更新每个粒子的最佳位置pbest和种群的最佳位置gbest。
[0040]
步骤(2.4)、根据速度和位置更新公式更新每个粒子的速度和位置。
[0041]
步骤(2.5)、判断是否达到迭代次数或者最佳适应值是否达到预设值,如未达到则返回步骤(2.2),否则输出结果并结束运行。如图2所示,为改进的粒子群算法迭代过程中的适应值变化曲线,由图可得在迭代第7次时适应值即降到了较小值,在迭代第48次时即收敛到了最小适应值。如图3所示,为整形算法得到的目标光束所需的近场调制相位。
[0042]
改进粒子群算法的迭代过程中包含两个变异策略,分别是选中的粒子被重新初始化位置速度和选中的粒子增加随机扰动,以保持粒子群的多样性和改进算法性能。
[0043]
改进的粒子群算法中,以泽尼克多项式系数作为粒子位置向量,以输出光束与目标光束光强分布的均方根差作为适应度函数。
[0044]
步骤(3)、将得到的近场调制相位转化为8位深(256)灰度图后加载到液晶空间光调制器中,完成目标光束整形。如图4所示,为目标环形光束的理论光强分布和整形得到的光束光强分布。
[0045]
以上所述,仅为本发明中的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉该技术的人在本发明所揭露的技术范围内,可理解想到的变换或替换,都应涵盖在本发明的包含范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1