一种人形仿真机器人眼部光学系统设计方法与流程
1.本发明涉及仿真机器人眼部制备方法技术领域,特别是一种人形仿真机器人眼部光学系统设计方法。
背景技术:
2.现有技术中,和人体外形、高度一致的人形仿真机器人越来越多的走近了更多的家庭,给人们的生活带来了更多的乐趣。随着技术的发展,目前的人形仿真机器人很多还具有了一定的智能语音功能(比如具有语音等功能的人形仿真机器人,对独居老人起到陪伴作用),以及实现一些动作功能(本质是一种仿真机器人),这样更提高了人们的使用体验。为了给用户带来好的体验效果,厂家对人形仿真机器人的生产质量及外观要求也越来越高,因为人形仿真机器人如果外形和真实人体差别过大容易产生比较明显的恐怖谷效应,对用户的使用体验带来极大的不利影响。
3.在人形仿真机器人的组成构造中,头部模组由于能产生各种面部表情具有举足轻重的作用,在一个人形仿真机器人的头部细节中,眼睛是最重要的也是一个视觉中心,眼睛做的美观、对人们的使用愉悦感是增强的,能给用户带来更好的使用体验。现有技术中,在较为高级的人形仿真机器人等中,为了实现和物联网进行交互,也就是说可以让头部实现视觉的功能,那么,视觉的功能实现,势必要把小型摄像头和模型眼睛之间做融入(摄像头安装在模型眼睛内),但是目前的技术中,仅仅只是为了满足人形仿真机器人等视觉的功能(直接在仿真眼部后侧端安装小型摄像头,设计没有考虑美观性和摄像头采集图像的焦距等因素),但是完全忽略美观及好的视频采集效果兼容,这样特别应用于人形仿真机器人生产时,外形既不美观,也降低了视觉效果的质量,并降低了用户的体验效果,对人形仿真机器人的应用或多或少造成了不利的影响。综上,现有的人形仿真机器人的眼部模组生产还存在很大的改进余地,提供一种能兼容美观及好的视频采集效果的眼部光学系统设计方法显得尤为必要。
技术实现要素:
4.为了克服现有人形仿真机器人的眼部模组由于结构所限,存在如背景所述弊端,本发明提供了使用光机一体化模型预估,降低了设计难度和设计成本,同时在设计的时候对已有的眼部模组外观不可变的边界条件适应性增强,具有更完美的外观、并同时兼顾视频采集功能,对人形仿真机器人产品的技术进步,提高用户好的使用体验起到了有利技术支持的一种人形仿真机器人眼部光学系统设计方法。
5.本发明解决其技术问题所采用的方案是:
6.人形仿真机器人眼部光学系统设计方法,其特征在于,采用pc机内的3d结构和光学追迹设计eda软件进行设计,眼部光学系统的仿真眼球前部,其仿真角膜以及仿真晶状体、虹膜、角膜晶状体使用具有曲率的前镜片替代,虹膜采用彩绘的方式画在前镜片第二面的磨砂平面上或者画在前镜片的安装平面上,达到更逼真的效果;设计包括如下步骤,步骤
a:简化人形仿真机器人的眼部模组微型摄像机和仿真眼部的光学设计模型,估算摄像头的焦距和后截距,具体的,在设计软件中使用一个简单的近轴模型来进行摄像头的焦距和后截距设计替代,提高设计效果及速率;步骤b:设计眼部模组的前镜片,让其第一面镜片与眼球外部曲率半径相同,并设计更改第一面镜片的厚度及其第二面镜片的曲率,实际应用中实现摄像头和前镜片对图像录入的焦距提升效果;步骤c:设计选择摄像头光阑孔的位置为第二面镜片的齐明点附近,第二面镜片曲率半径中心和第一面的曲率半径中心齐明点重合,光线能顺利的在摄像头的焦平面汇聚;步骤d:对前镜片效虹膜所在的位置,中间所对应的瞳孔,为了使其结构件饱满,按照注塑或者3d打印工艺进行设计,具体模拟瞳孔设计的厚度为0.6-0.8mm之间、瞳孔大小为2.6-2.8mm之间,实现满足针孔摄像头的视场角前提下,并满足肉眼平均瞳孔大小及更好的美观性效果;步骤e:对于镜片厚度设计,采用折中方式进行设计、满足加工需求,并对模型中最后一个眼球外部曲率半径数据修正,实现生产中利于加工基础上,加工后眼部模组外形美观及图像采集更好的效果。
7.进一步地,所述前镜片是凸凹透镜,其曲率半径和结构同时满足镜片的利于安装、外观仿真度高及不影响实际光学成像效果条件;摄像头的安装方法设计也满足利于安装、外观仿真度高及不影响实际光学成像效果条件。
8.进一步地,所述步骤a中,因为摄像头光阑的位置在摄像头的最前面,摄像头的焦距基本上等于自身的外观尺寸厚度,所以在软件中使用一个简单理想的透镜成像模型来进行替代,减少了设计工作量、且能保证摄像头和镜片的相对对焦距离。
9.进一步地,所述步骤b中,第一镜片与位于其后部的摄像头进行光学匹配后,能减少输入到摄像头的像差和不增加额外的光焦度。
10.进一步地,所述步骤b中,眼部模组的摄像机实际生产装配与前面镜片之间有间距,所以机械结构不能太薄,否则难以生产。
11.进一步地,所述步骤b中,前镜片在光学设计上一般制图是从左到右,应用中光从左边射入右边射出,左边是物方右边是像方,前镜片从左第一片为第一面,第二片为第二面以此类推,那么设计中只能更改第二面的曲率(因为一个镜片的厚度是两个面之间,这里是单镜片,可以不用说第一面的镜片厚度)。
12.进一步地,所述步骤c中,因为前镜片要降低自身的一些离轴像差并且降低光焦度对摄像头的影响,所以选择光阑孔的位置为第二面的齐明点附近。
13.进一步地,所述步骤d中,相对大的瞳孔孔径,能防止孔径不够大的情况下容易遮挡造成摄像头图像采集盲区的问题。
14.进一步地,所述步骤d中,因为摄像头和镜片之间的剩余像差仍然存在,所以需要微调,并对模型中最后一个眼球外部曲率半径数据去修正(需要对模型中的第二个面不是第一个面修正,因为第一个面是要迎合眼球的轮廓曲率,可以微调,但是一般都是一个定值,所以只能对第二个面去修正)。
15.本发明有益效果是:本发明采用单片镜片进行设计,实际生产工艺中,可以使用整个眼球作为包括第一镜片的摄像头光学总成,后端仅仅需要安装传感器芯片即可,这样可以摒弃传统摄像头使用限制,能实现更多的扩展应用,结合使用双胶合的镜片能产生更好更广的成像,让其接近肉眼成像的效果,整个眼球可以使用整个眼球作为包括第一、第二镜片的摄像头光学总成,后端仅仅需要安装传感器芯片即可,这样可以摒弃传统摄像头使用
限制,摄像头使用闲置能实现更多扩展应用。本发明降低了设计难度和设计成本,同时在设计的时候对已有的眼部模组外观不可变的边界条件适应性增强,能具有更完美的外观并同时兼顾视频采集功能的情况,对人形仿真机器人产品的技术进步,提高用户好的使用体验起到了有利的技术支持。基于上述,本发明具有好的应用前景。
附图说明
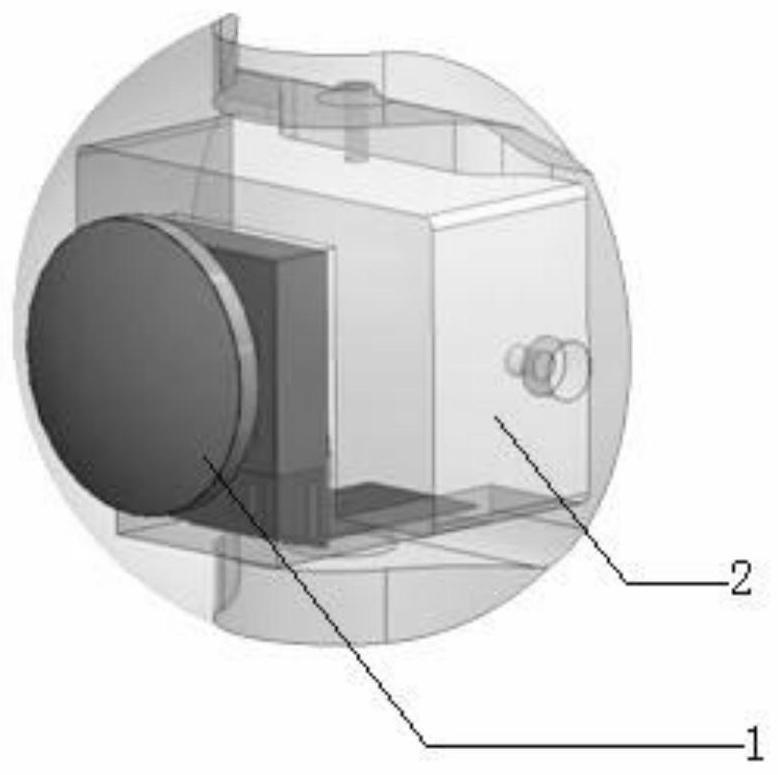
16.图1是本发明设计的眼部光学系统前右视立体结构示意图。
17.图2是本发明设计的眼部光学系统右视平面结构示意图。
18.图3是本发明设计后眼部光学系统聚焦平面结构示意图。
19.图4是本发明设计的眼部光学系统主要参数列表。
具体实施方式
20.图1、2所示,一种人形仿真机器人眼部光学系统设计方法,采用pc机内的3d结构和光学追迹设计eda软件进行设计,眼部光学系统的仿真眼球前部,其仿真角膜以及仿真晶状体、虹膜部分、角膜晶状体结构使用具有曲率的前镜片1替代,虹膜采用彩绘的方式画在前镜片1第二面的磨砂平面上或者画在前镜片的安装平面上,能达到更逼真的效果;前镜片1是凸凹透镜,其曲率半径及结构同时满足镜片的利于安装、外观仿真度高和不影响实际光学成像效果条件,凸凹透镜其光学的孔径光阑在仿真眼球瞳孔位置和肉眼类似;与此同时还可以采用一些别的类似结构,如:光学摄像头2实际的光阑孔相对于这一片凹凸透镜而言,位置不和肉眼瞳孔位置一致,这样的设计也可以达到相同的目的(利于安装、外观仿真度高和不影响实际光学成像效果)。摄像头2的安装方法设计也满足利于安装、外观仿真度高和不影响实际光学成像效果条件(目前,摄像头以及配合组件的安装位置方法,第一种是使用摄像头模组2(摄像头)以肉眼的成像规律和眼球的外围结构进行安装,第二种是因结构限制,由于摄像头模组2没有很大的自由度空间安装,采用相机单传感器的形式安装,光学则融合在整个眼球内的机构进行安装,因此上述两种安装方式均应满足利于安装、外观仿真度高和不影响实际光学成像效果条件)。
21.图1、2所示,一种人形仿真机器人眼部光学系统设计方法,设计包括如下步骤(1):简化人形仿真机器人的眼部模组微型摄像机2和仿真眼部的光学设计模型,估算摄像头2的焦距和后截距(后截距为最后一片镜片的光心也就是曲面的中心到成像的焦平面的直线距离),具体的,在设计软件中使用一个简单的近轴模型来进行摄像头1的焦距和后截距设计替代,提高设计效果及速率;在该步骤中,因为摄像头2(包括针孔摄像头或者微型摄像头)设计之处为了降低厚度、其光阑的位置在摄像头2的最前面,摄像头2的焦距基本上等于自身的外观尺寸厚度,所以在软件中可以使用一个简单的近轴模型来进行替代,减少了设计工作量、且能保证摄像头的焦距和后截距。(2):设计眼部模组的前镜片1,让其第一面镜片与眼球外部曲率半径相同,并设计更改第一面镜片的厚度及其第二面镜片的曲率,实际应用中,实现摄像头和前镜片对图像录入的焦距提升效果;该步骤中,第一镜片与位于其后部的摄像头2进行光学匹配后,能减少输入到摄像头的像差和不增加额外的光焦度;眼部模组的摄像机2的实际生产装配与前面镜片1之间有间距,所以机械结构不能太薄,否则难以生产;前镜片2在应用软件层面、光学设计上一般制图是从左到右,应用中光从左边射入右边
射出,左边是物方右边是像方,前镜片1从左第一片为第一面,第二片为第二面以此类推,那么设计中只能更改第一面镜片的厚度和第二面镜片的曲率(由于只有一片镜片、一片镜片有两个面;只能更改第一面镜片的厚度和第二面镜片的曲率的原因,是因为镜片按照光路从外照射而内,分辨经过第一个曲面和第二个曲面,第一个曲面要迎合眼球的外轮廓大小,所以选择不变或者轻微变化,为了抵消第一个面的正光焦度所以只能更改第二个面,为了降低像差所以在计算的时候考虑到多个变量会有更好的收敛配合,所以增加了一个厚度可变的变量)。(3):设计选择摄像头2光阑孔的位置为第二面镜片的齐明点附近,第二面镜片曲率半径中心和第一个面的曲率半径中心(齐明点)重合,这样,光线可以顺利的在摄像头的焦平面汇聚(具体如图3所示),利于图像的录入;该步骤中,因为前镜片要降低自身的一些离轴像差并且降低光焦度对摄像头的影响(实际上离轴像差和光焦度这两个物理参数是没关系的,是因为摄像头的镜片第一面,镜片第二面在设计初始结构中,本身就可以让成像的光线顺利的通过这片玻璃而且不带来更多的像差,然而这不是最优解,最优解是在后面的计算中带入这两个可以变化的变量,就是镜片的玻璃厚度和第二面,通过软件迭代得到最优解。),所以选择光阑孔的位置为第二面的齐明点附近(实现的效果让成像更清晰,让进入摄像头的光不必分担更多的光焦度,不必手动大范围调整摄像头的位置)。
22.图1、2所示,一种人形仿真机器人眼部光学系统设计方法,(5):对前镜片1等效虹膜所在的位置,中间所对应的瞳孔,为了让工艺使其结构件饱满,按照注塑或者3d打印工艺进行设计,具体模拟瞳孔设计的厚度为0.7mm、瞳孔大小为2.7mm,实现满足大多数针孔摄像头的视场角前提下,并满足肉眼平均瞳孔大小及更好的美观性效果;具体的,对于镜片厚度设计,采用折中方式进行设计、满足加工需求,并对模型中最后一个眼球外部曲率半径数据去修正(在实际计算中,这个玻璃厚度是单调的,越薄越好,甚至到0mm,实际上做生产加工不可能越薄越好甚至到0mm的厚度,那么这里第二个对厚度的约束条件就是实际上是行业内的生产加工的能力去设计或者放公差,这个解决方案就是做的越薄越好),实现生产利于加工基础上,加工后眼部模组外形美观及图像采集效果好的效果;该步骤中,相对大的瞳孔孔径,能防止孔径不够大的情况下容易遮挡造成摄像头图像采集盲区的问题;设计中因为摄像头和镜片之间的剩余像差仍然存在,所以需要微调,具体原因是,因为前镜片不提供光焦度、所以实际上厚度越小越好,但本发明定下来了前镜片第二面的齐明点距离,所以厚度大约为眼球曲率半径和第二面齐明点的半径之差,还在于厚度所在位置又影响镜片边沿厚度,厚度设计折中满足了加工需求,所以为了校正剩余像差这里就只有对最后一个曲率半径去修正,修正以后的最优方案数据是所设计镜片的光学尺寸数据,修正包括第一面镜片曲率半径,第二面镜片曲率半径,镜片的厚度及材质,镜片的直径大小公差,通光孔径等(具体见图4)。
23.图1、2所示,通过上述技术方案,本发明采用单片镜片进行设计,且实际应用中,通过本发明可以衍生出将第一片镜片采用双胶合的方式(两片镜片可以做双胶合,使用光学胶,比如说树脂或者uv胶水去将两个镜片其中相反方向曲率相同的光学表面胶合)实现更大像差的校正,获得更满意的成像效果和精度;本技术设计后,实际生产工艺中,可以使用整个眼球作为包括第一、第二镜片的摄像头光学总成,后端仅仅需要安装传感器芯片即可,这样可以摒弃传统摄像头使用限制,能实现更多的扩展应用。本发明降低了设计难度和设计成本,同时在设计的时候对已有的眼部模组外观不可变的边界条件适应性增强,能具有
更完美的外观并同时兼顾图像采集功能的,对人形仿真机器人产品的技术进步,提高用户好的使用体验起到了有利的技术支持。
24.以上显示和描述了本发明的主要特征及本发明的优点,对于本领域技术人员而言,显然本发明限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
25.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,实施例中的以上显示和描述了本发明的基本原理和主要特征及本发明的优点,对于本领域技术人员而言,显然本发明限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1