一种分体联动水下激光成像系统的制作方法
1.本实用新型涉及光电成像技术领域,具体涉及一种分体联动水下激光成像系统 。
背景技术:
2.目前用于水下视频成像的方法主要有两种,一种是距离选通技术,采用脉冲激光,结合门控摄像机,有效避免水中微小物质对光线的后向散射影响,最远探测距离可达几十米;另一种是连续光照明成像,连续光源可以是激光也可以是其它光源,但是通常与成像摄像机位于同一个密封装置内,由于水中微小物质对光的散射影响,近距离水中微小物质的散射的光比远处照射到目标物上的反射光回到摄像机时相对较强,很难观察较远的目标物,观测距离通常在2米以内。两种方法第一种成本较高,尺寸较大,不太适合大面积推广应用,第二种方法由于观测距离较近通常只适合静止或近似静止拍摄成像,如果是运动中,两米以内观察搜索很容易在看到目标物时撞上目标物。在大面积水下搜索过程中无人船或无人潜航器需要能够观测距离十米以上才能保证安全的前提下又能快速的航行搜索,这就需要一种成本相对较低,尺寸相对较小,但是观测距离又能够相对较远的水下成像系统。
技术实现要素:
3.本实用新型为了克服以上技术的不足,提供了一种通电机联动实现目标上照明对成像视野覆盖,实现较远距离水下成像的分体联动水下激光成像系统。
4.本实用新型克服其技术问题所采用的技术方案是:
5.一种分体联动水下激光成像系统,包括:
6.左连接臂及右连接臂,连接横杆沿水平方向设置,连接横杆的左侧端与左连接臂的下端相连接,连接横杆的右侧端与右连接臂的下端相连接;
7.连接横杆的左右两端分别通过轴承转动安装有转轴,所述转轴沿竖直方向设置,俯仰固定盘转动安装于转轴上;
8.水平驱动装置,设置于左连接臂及右连接臂上,用于驱动同侧对应的俯仰固定盘在水平方向上转动;
9.俯仰电机的电机定子通过法兰盘ⅱ安装于俯仰固定盘的外侧端,电机定子的轴线沿水平方向设置,俯仰电机的电机转子转动安装于电机定子上,电机转子外侧同轴安装有法兰盘ⅰ;
10.转筒,呈筒形结构,其左右两端开口,其轴线沿水平方向设置,转筒的内侧端同轴固定于法兰盘ⅰ上,转筒的侧壁上设置有开口,左侧端的转筒内安装有激光照明器,激光照明器正对于该转筒的开口,右侧端的转筒内安装有摄像机,摄像机正对于该转筒的开口;以及
11.密封盖,呈筒形结构,其一端开口,密封盖通过开口部密封套装于转筒的外侧,密封盖的侧壁上安装有与开口相对应的玻璃片。
12.为了提高密封性,上述轴承的上下两端分别设置有密封圈ⅲ。
13.进一步的,上述水平驱动装置包括安装于左连接臂或右连接臂上的水平电机,水平电机的输出轴与转轴同轴传动连接,所述俯仰固定盘上安装有齿轮ⅱ,所述转轴上安装有齿轮ⅰ,齿轮ⅰ与齿轮ⅱ相啮合。
14.为了提高密封性,法兰盘ⅰ与俯仰固定盘之间设置有密封圈ⅱ,法兰盘ⅰ与法兰盘ⅱ之间设置有密封圈ⅰ。
15.本实用新型的有益效果是:水平驱动装置驱动两个俯仰固定盘水平旋转,俯仰电机的电机转子转动从而使转筒旋转,从而实现了激光照明器或摄像机俯仰角度的调节,转筒插入密封盖内起到密封作用,激光照明器发出的光线穿过开口及玻璃片,摄像机通过开口和玻璃片捕捉画面,通过水平方向和俯仰方向的调节,让激光照明光斑照亮成像视野。通过将激光照明部分与成像摄像机部分分体,从而有效避免水下照明器近距离散射光进入摄像机视野,比远处目标上反射光相对较强,从而影响目标成像的影响。另外分体后激光照明侧和成像侧采用独立的水平、俯仰电机,并通过电机联动实现目标上照明对成像视野的覆盖,最终实现较远距离水下成像。
附图说明
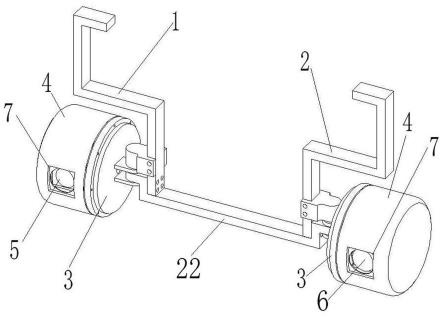
16.图1为本实用新型的立体结构示意图;
17.图2为本实用新型的联动光路示意图;
18.图3为本实用新型的俯仰固定盘部位的剖面结构示意图;
19.图4为本实用新型的水平电机部位的立体结构示意图;
20.图中,1.左连接臂 2.右连接臂 3.俯仰固定盘 4.密封盖 5.激光照明器 6.摄像机 7.玻璃片 8.转筒 9.开口 10.电机定子 11.电机转子 12.法兰盘
ⅰꢀ
13.法兰盘
ⅱꢀ
14.密封圈
ⅰꢀ
15.密封圈
ⅱꢀ
16.水平电机 17.转轴 18.齿轮
ⅰꢀ
19.齿轮
ⅱꢀ
20.轴承 21.密封圈
ⅲꢀ
22.连接横杆。
具体实施方式
21.下面结合附图1至附图4对本实用新型做进一步说明。
22.一种分体联动水下激光成像系统,包括:左连接臂1及右连接臂2,连接横杆22沿水平方向设置,连接横杆22的左侧端与左连接臂1的下端相连接,连接横杆22的右侧端与右连接臂2的下端相连接;连接横杆22的左右两端分别通过轴承20转动安装有转轴17,转轴17沿竖直方向设置,俯仰固定盘3转动安装于转轴17上;水平驱动装置,设置于左连接臂1及右连接臂2上,用于驱动同侧对应的俯仰固定盘3在水平方向上转动;俯仰电机的电机定子10通过法兰盘
ⅱꢀ
13安装于俯仰固定盘3的外侧端,电机定子10的轴线沿水平方向设置,俯仰电机的电机转子11转动安装于电机定子10上,电机转子11外侧同轴安装有法兰盘
ⅰꢀ
12;转筒8,呈筒形结构,其左右两端开口,其轴线沿水平方向设置,转筒8的内侧端同轴固定于法兰盘
ⅰꢀ
12上,转筒8的侧壁上设置有开口9,左侧端的转筒8内安装有激光照明器5,激光照明器5正对于该转筒8的开口9,右侧端的转筒8内安装有摄像机6,摄像机6正对于该转筒8的开口9;以及密封盖4,呈筒形结构,其一端开口,密封盖4通过开口部密封套装于转筒8的外侧,密封盖4的侧壁上安装有与开口9相对应的玻璃片7。左连接臂 1和右连接臂2固定到无人船或潜航器上,水平驱动装置驱动两个俯仰固定盘3水平旋转,俯仰电机的电机转子11转动从而
使转筒8旋转,从而实现了激光照明器5或摄像机6俯仰角度的调节,转筒8插入密封盖4内起到密封作用,激光照明器5发出的光线穿过开口9及玻璃片7,摄像机6通过开口9和玻璃片7捕捉画面,通过水平方向和俯仰方向的调节如附图2所示,让激光照明光斑照亮成像视野。通过将激光照明部分与成像摄像机部分分体,从而有效避免水下近距离散射光比远处目标上反射光相对较强,从而影响目标成像的影响。另外分体后激光照明侧和成像侧采用独立的水平、俯仰电机,并通过电机联动实现目标上照明对成像视野的覆盖,最终实现较远距离水下成像。
23.优选的,轴承20的上下两端分别设置有密封圈
ⅲꢀ
21。通过设置密封圈
ⅲꢀ
21可以防止水进入轴承20中造成轴承20的润滑失效,提高了轴承20的寿命。
24.水平驱动装置可以为如下结构,其包括安装于左连接臂1或右连接臂2上的水平电机16,水平电机16的输出轴与转轴17同轴传动连接,俯仰固定盘3上安装有齿轮
ⅱꢀ
19,转轴17上安装有齿轮
ⅰꢀ
18,齿轮
ⅰꢀ
18与齿轮
ⅱꢀ
19相啮合。水平电机16转动从而驱动转轴17转动,由于转轴17通过啮合的齿轮
ⅰꢀ
18与齿轮
ⅱꢀ
19与俯仰固定盘3传动连接,从而驱动俯仰固定盘3在水平方向上转动。
25.法兰盘
ⅰꢀ
12与俯仰固定盘3之间设置有密封圈
ⅱꢀ
15,法兰盘
ⅰꢀ
12与法兰盘
ⅱꢀ
13之间设置有密封圈
ⅰꢀ
14。通过设置密封圈
ⅰꢀ
14和密封圈
ⅱꢀ
15,可以提高俯仰电机处的密封性,提高俯仰电机的寿命。
26.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1