一种自适应变焦装置的制作方法
1.本实用新型涉及光学领域,具体涉及一种自适应变焦装置。
背景技术:
2.由于激光优良的能量传输能力,使得激光在工业、医疗以及军事方面得到了重要应用,激光应用方面的研究工作已经成为光学领域的研究重点,在一些应用环境中,需要将激光发射传输到远距离目标表面,以获得高能量密度聚焦光斑,因环境不同,发射距离不同导致焦点无法做到兼容,而手动挪动焦点位置太过繁杂且容易出错。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种自适应变焦装置,以克服上述现有技术中的不足。
4.本实用新型解决上述技术问题的技术方案如下:一种自适应变焦装置,包括:激光器、滑动模组、激光测距仪、控制器、非球面透镜和扩束聚焦镜组,非球面透镜布置在激光器的激光出口处,扩束聚焦镜组布置在非球面透镜的出光侧;非球面透镜与滑动模组相固定,并由滑动模组调整与扩束聚焦镜组之间的间距;激光器、滑动模组和激光测距仪分别与控制器电连接。
5.在上述技术方案的基础上,本实用新型还可以做如下改进。
6.进一步,扩束聚焦镜组包括多块球面镜和聚焦镜,非球面透镜、多块球面镜和聚焦镜沿激光传播路径依次布置。
7.进一步,球面镜的块数为四块。
8.进一步,非球面透镜、多块球面镜和聚焦镜的镜面均镀增透膜,透过率大于99.8%。
9.进一步,非球面透镜、多块球面镜和聚焦镜的面型精度均为4/λ-10/λ。
10.进一步,非球面透镜、多块球面镜和聚焦镜的焦距公差均小于
±
1%。
11.进一步,非球面透镜、多块球面镜和聚焦镜均偏心1
′‑
10
′
。
12.进一步,滑动模组为微动电滑台,其位移精度为1um-200um。
13.进一步,还包括外壳和qcs连接器,滑动模组、非球面透镜和扩束聚焦镜组均设置在外壳内,qcs连接器设置在外壳上,激光器通过光纤与qcs连接器连接;激光测距仪设置在外壳上。
14.进一步,激光测距仪的测量精度为1um-1mm。
15.本实用新型的有益效果是:激光测距仪向目标物体发射激光,以实现测距,并将测距信息反馈给控制器,控制器则根据反馈的距离信息控制滑动模组启动,以调整非球面透镜与扩束聚焦镜组之间的间距,实现自适应变焦,以确保激光聚焦在目标物体上,从而满足不同的应用环境。
附图说明
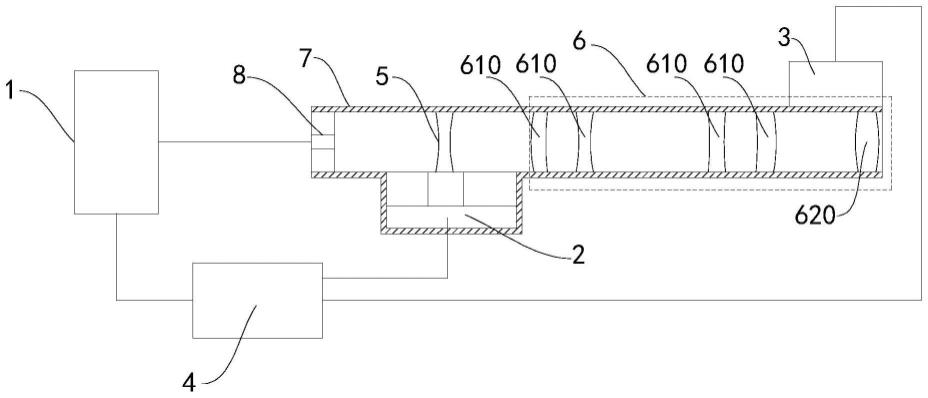
16.图1为本实用新型所述自适应变焦装置的结构图。
17.附图中,各标号所代表的部件列表如下:
18.1、激光器,2、滑动模组,3、激光测距仪,4、控制器,5、非球面透镜,6、扩束聚焦镜组,610、球面镜,620、聚焦镜,7、外壳,8、qcs连接器。
具体实施方式
19.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
20.实施例1
21.如图1所示,一种自适应变焦装置,包括:激光器1、滑动模组2、激光测距仪3、控制器4、非球面透镜5和扩束聚焦镜组6;
22.非球面透镜5布置在激光器1的激光出口处,激光器1所发射脉冲激光束可以射向非球面透镜5;
23.扩束聚焦镜组6布置在非球面透镜5的出光侧,由非球面透镜5射出的激光可以射向扩束聚焦镜组6,并由扩束聚焦镜组6扩束后聚焦在目标物体上;
24.非球面透镜5与滑动模组2相固定,并且非球面透镜5可由滑动模组2调整其扩束聚焦镜组6之间的间距;
25.激光器1的信号输入端与控制器4的信号输出端电连接,滑动模组2的信号输入端与控制器4的信号输出端电连接,激光测距仪3的信号输出端与控制器4的信号输入端电连接;
26.激光测距仪3向目标物体发射激光,以实现测距,并将测距信息反馈给控制器4,控制器4则根据反馈的距离信息控制滑动模组2启动,以调整非球面透镜5与扩束聚焦镜组6之间的间距,实现自适应变焦,以确保激光聚焦在目标物体上。
27.实施例2
28.如图1所示,本实施例为在实施例1的基础上对其所进行的进一步改进,具体如下:
29.扩束聚焦镜组6包括多块球面镜610和聚焦镜620,非球面透镜5、多块球面镜610和聚焦镜620沿激光传播路径依次布置,通过调整非球面透镜5的位置来改变其与多块球面镜610的合焦距,最后通过聚焦镜620,从而达到聚焦效果。
30.实施例3
31.如图1所示,本实施例为在实施例2的基础上对其所进行的进一步改进,具体如下:
32.球面镜610的块数优选为四块,当然,并不排除采用其他数量,本实施例中选择四块,是因为可以满足对应工况需求。
33.实施例4
34.如图1所示,本实施例为在实施例2或3的基础上对其所进行的进一步改进,具体如下:
35.非球面透镜5的镜面镀增透膜,透过率大于99.8%;多块球面镜610的镜面镀增透膜,透过率大于99.8%;聚焦镜620的镜面镀增透膜,透过率大于99.8%。
36.实施例5
37.如图1所示,本实施例为在实施例2或3或4的基础上对其所进行的进一步改进,具体如下:
38.非球面透镜5的面型精度为4/λ-10/λ,多块球面镜610的面型精度为4/λ-10/λ,聚焦镜620的面型精度为4/λ-10/λ。
39.实施例6
40.如图1所示,本实施例为在实施例2或3或4或5的基础上对其所进行的进一步改进,具体如下:
41.非球面透镜5的焦距公差小于
±
1%,多块球面镜610的焦距公差小于
±
1%,聚焦镜620的焦距公差小于
±
1%。
42.实施例7
43.如图1所示,本实施例为在实施例2或3或4或5或6的基础上对其所进行的进一步改进,具体如下:
44.非球面透镜5偏心1
′‑
10
′
,多块球面镜610偏心1
′‑
10
′
,聚焦镜620偏心1
′‑
10
′
。
45.实施例8
46.如图1所示,本实施例为在实施例2或3或4或5或6或7的基础上对其所进行的进一步改进,具体如下:
47.滑动模组2优选为微动电滑台,微动电滑台为现有技术,故在此不详细赘述其工作原理,在选型过程中,其位移精度为1um-200um,可以实现高精度精准变焦。
48.实施例9
49.如图1所示,本实施例为在实施例1~8任一实施例的基础上对其所进行的进一步改进,具体如下:
50.自适应变焦装置还包括外壳7和qcs连接器8,滑动模组2设置在外壳7内,非球面透镜5设置在外壳7内,扩束聚焦镜组6设置在外壳7内,qcs连接器设置在外壳7上,激光器1通过光纤与qcs连接器8连接;激光测距仪3设置在外壳7上;
51.激光器1所发射的脉冲激光束通过光纤传导至qcs连接器8,然后由qcs连接器8射向非球面透镜5,再经非球面透镜5射向扩束聚焦镜组6,最后由扩束聚焦镜组6射出外壳7,并射向目标物体;
52.通常情况下,激光测距仪3安装在外壳7的出光口处,激光测距仪3的测量精度在1um-1mm。
53.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1