用于确定眼镜镜片在固持器上的位置和/或取向的方法和装置与流程
本技术涉及用于确定眼镜镜片在固持器上的位置和/或取向的方法和装置。特别地,本发明涉及这样的方法和装置,其中,确定眼镜镜片的位置和/或取向,以便能够在眼镜镜片上正确地施加印章图形。在这种情况下,位置应理解为是指物体在空间中所处的地点。取向指定物体在此位置的取向。有时,特别是在机器人学中,位置和取向的组合也称为姿势(参见din en iso 837:2012-03)。
背景技术:
1、在通过研磨装配眼镜镜片的过程中,眼镜师使用眼镜镜片上的参考点。在这种情况下,研磨装配是指使眼镜镜片大致适于所选镜架并定心的过程。在通过研磨装配之前,眼镜镜片通常具有圆形或椭圆形的形状。因此,研磨装配使眼镜镜片具有适于所选镜架的形状。在这种情况下,定心正确地对眼镜镜片定向,从而为最终配戴眼镜的人实现预期的光焦度。
2、在这种情况下,对于球面或复曲面眼镜镜片,眼镜镜片上的参考点在焦度计下被确定,并通过做标记装置(又称为打点单元)在眼镜镜片上被标记(参见例如“handbuch deraugenoptik”[“眼科光学手册”],由德国上科亨卡尔蔡司7082出版,helmut goersch博士修订,1987年第3版,第220页)。特别是光学中心点在此用作参考点,在光学中心点处,垂直入射的光线穿过眼镜镜片而不会被折射。
3、在渐进式镜片的情况下,通过焦度计进行这种简单的参考点重建是不可能的,或者以直接的方式是不可能的。渐进式镜片的参考点在球面或复曲面镜片的情况没有被限定,在这种情况下,上述光学中心点可以用作参考点,但在渐进式镜片的情况下,是其位置由眼镜镜片的设计限定的点。参考点是例如渐进式眼镜镜片的近用参考点(参见din58208:2013-10,第3节)、远用参考点(参见din en iso 13666:2012;第5.15节)和棱镜参考点(参见din en iso 13666:2012年,第14.2.12节)。这些参考点无法通过焦度计确定。
4、眼镜镜片设计者可以自由地限定远用参考点或近用参考点的位置以及还有棱镜参考点的位置。各个眼镜镜片制造商在此方面已发展出惯例,这些惯例对于其产品系列中的所有眼镜镜片不一定都相同,而是甚至可能根据产品类型而不同。制造商的技术文档描述了这些参考点在镜片上的位置。
5、通常在棱镜参考点处,测量与厚度减小棱镜叠加的处方棱镜度,这对于双眼都是相同的,并且仅在竖直方向上起作用。厚度减小棱镜旨在减小眼镜镜片的厚度,并且在以上引用的“handbuchfüraugenoptik”的第118页上进行了解释。由该测量得出(例如,在tabo(德语缩写-technischer ausschuss für brillengläser [眼镜镜片技术委员会])方案中表示为以cm/m为单位的棱镜和作为角度的底;通过该方案明确地限定角度)并且眼镜镜片旨在具有的棱镜测量值在包装上被指示。
6、与球面或复曲面眼镜镜片的光学中心点的情况不同,对于渐进式镜片,在任何参考点处都没有由标准限定的零光线偏转;而且,没有标准要求使用焦度计进行测量以在那里产生测量散光度最小值。
7、因此,根据标准din en iso 898-2(2004)第7.1节,渐进式镜片设有两个永久性标记(还参见din en iso 13666:2012 14.2)。由于永久性标记以前作为雕刻物被应用,因此它们又被俗称为永久性雕刻物。由于当今经常使用激光器来施加它们,因此术语“签名”或“签名标记”对于眼镜镜片上的各种各样的标记也是常用的。这些永久性标记之间的中间点被称为erp(代表雕刻物参考点)。在蔡司的渐进式镜片情况下,所述erp同时是上述棱镜参考点。永久性标记位于erp的左右两侧例如17毫米。
8、所述永久性标记的位置可以用于在眼镜镜片上重建坐标系:从镜片的正面垂直看时,它们之间的中间决定了坐标原点;从左永久性标记到右永久性标记的方向确定正x方向。然后通常由眼镜镜片制造商在这个坐标系中指定上述参考点的位置。
9、举例来说,近用参考点和远用参考点位于这种坐标系中由制造商限定的点处。如果打算再次测量渐进式眼镜镜片的焦度,则近用参考点和远用参考点将发挥一部分作用:然后必须在这两个点出现的测量值是由光学设计者在生产眼镜镜片之前确定的、并且通常在与眼镜镜片相关联的文件中、例如在包装上指示的测量值。
10、而且,din en iso 8980-2(2004)第7.2节还建议非永久性标识(即,可以去除的标识,使得其不再存在于成品眼镜中),通俗地称为盖章或印章图形,即使其是通过其他方法(例如喷墨打印法)而不是通过印章施加于眼镜镜片上。下文中,术语“盖章”用于指根据dinen iso 8990-2(2004)第7.2节的所述非永久性标识。
11、所述盖章包含:
12、1. 用于眼镜镜片的取向的标记,
13、2. 远用参考点的标记,
14、3. 近用参考点的标记,
15、4. 装配点的标记,以及
16、5. 棱镜参考点的标记。
17、在所述盖章中,远用参考点、近用参考点和/或棱镜参考点可以用粗圆圈标记,以便在使用焦度计进行测量时,仅正确的圆形区域在这些点周围生效。结果,精确地,由圆圈限定的孔在使用焦度计进行重新测量时生效,这有助于重新测量。
18、所述盖章必须相对于永久性标记一致地施加,因为当通过研磨和定心眼镜镜片来装配眼镜镜片时眼镜师将依赖于盖章的正确性。在这种情况下,一致地施加意味着盖章的标记必须在眼镜镜片制造商在由如上所解释的永久性标记限定的坐标系中所限定的正确位置上。关于位置不正确地施加盖章于是可能导致眼镜镜片的位置或取向误差,即,如果眼镜师依赖于盖章的正确位置,那么眼镜镜片将不正确地结合到眼镜镜架中。在此,定心误差被理解为是指眼镜镜片相对于正确位置的位移(横向位置和/或装配高度的变化),并且取向误差被理解为是相对于正确取向的扭转。然而,这些名称在出版物中并未以标准化的方式使用,并且有时术语“定心误差”也被总体上用于以上限定的定心误差和取向误差。关于这方面的解释也可以在以上已经引用的“handbuch der augenoptik”的第140页及其后各页中找到。
19、定心误差和取向误差会不利地影响成品眼镜的可用性。由这样的位置误差或取向误差引起的影响主要在具有绝对值相对大的光焦度的眼镜镜片的情况下是至关重要的,因为在这种情况下,定心误差会导致棱镜效应,这是不令人期望的。可以使用prentice公式计算由于定心误差引起的棱镜效应的大小。
20、在预期用于矫正相对大的散光的眼镜镜片的情况下,与没有或几乎没有散光矫正的眼镜镜片的情况相比,取向误差具有更严重的影响。在渐进式镜片的情况下,相对大的下加光的情况下的取向误差的影响也比具有小下加光的镜片的情况更严重。这里的下加光表示渐进式镜片的近用下加光。在渐进式镜片的情况下的附加因素是,由于两个眼镜镜片在不同方向上的水平偏心(即,两个眼镜镜片相对于正确位置移位不同),因此在使用过程中双眼不再获得所谓的渐进通道。于是,使用者可能只用一只眼睛通过相关联的渐进通道看到位于近用区与远用区之间的过渡区域中的物体,而对于另一只眼睛,使用者使用散光和其他像差正在干扰的位置旁边的位置。渐进通道在远用参考点和近用参考点之间延伸,并且被设计成使得在那里针对双眼的相关联观看方向体验到最佳视觉条件。沿不同方向的竖直偏心(即位移)也会对眼镜配戴者的视觉印象产生不利影响:眼镜镜片不再以其被计算的方式起作用。双眼的视觉印象主要受到定心误差的干扰。
21、因此,在通过研磨和安装眼镜镜片来装配眼镜镜片时需要很高的准确度,这在一些情况下是由标准产生或由制造商限定的。举例来说,在din en iso 8980-2的第5.2.4点中规定了定心的最大偏差。通常可能要求在水平和竖直方向上的 ± 0.5毫米范围作为定心准确度。对于单光镜片,容许角度误差取决于眼镜镜片的柱镜度(根据dinen iso 13666:2012的柱镜)。根据din en iso 8980-2,定心过程中允许的最大误差取决于眼镜镜片的光焦度强度,特别是取决于折射更高的主子午线上的屈光力。在渐进式镜片情况下,绝对不允许接近上述标准极限的取向误差–即使是小处方柱镜,即处方中开出的处方小柱镜。当没有定心误差且没有取向误差时,使用者将出现最佳视觉印象:因此,眼镜师应该尽可能准确地工作。
22、为了施加盖章,通常与焦度无关地要求准确度。这里所要求的是,定心(即水平和竖直方向上的位置)的准确度为 ±0.3毫米,取向(即围绕基本上垂直于眼镜镜片的轴线旋转,该轴线在下文中又称为z方向)的准确度为 ±1度。
23、如今,通常在眼镜镜片的背面上施加负责渐进式眼镜镜片的渐进焦度的表面(又称为渐进表面)。因此,这些眼镜镜片也称为“背面渐进式”(bsp)。在这种情况下,眼镜镜片的背面是眼镜镜片的面向眼睛的那侧。在渐进式镜片的情况下,永久性标记通常被施加在眼镜镜片的产生渐进焦度的那侧上,也就是说,如今,因此通常在眼镜镜片的背面上。这是因为在生产渐进表面的过程中,眼镜镜片被封阻,即被施加在固持器上,并且封阻件精确地限定了眼镜镜片和渐进表面上的坐标系。在这种情况下,直径通常为43毫米的封阻件位于眼镜镜片的未加工的那侧:也就是说,如今通常在眼镜镜片的正面上。因此,在眼镜镜片的封阻状态下,由于在封阻状态下的坐标系被准确地限定并机械地实施,因此在正确位置上(例如,相对于erp为 ± 17毫米)施加永久性标记很简单。在bsp镜片情况下,然而,如果期望将其施加在眼镜镜片的正面上,由于封阻件大小的原因,封阻件会遮掩住永久性标记的位置。因此,它们被施加在平行于眼镜镜片的正面上的erp处的法向在处方位置处入射的光线再次离开眼镜镜片的位置处。在正确的姿势下,这在稍后产生永久性标记的正确“表观位置”。从正确的方向观看,这个位置确保永久性标记正确地出现在眼镜镜片的正面上的处方位置。
24、眼镜镜片的背面通常具有凹形,而眼镜镜片的正面具有凸形。因此,在大多数渐进式眼镜镜片的情况下,永久性标记被施加在眼镜镜片的凹面上。
25、在以前以“半成品法”生产的一般眼镜镜片的情况下,眼镜镜片的正面产生渐进功能。因此,这些镜片也被称为“正面渐进式”(fsp)。因此,在渐进式眼镜镜片的情况下,永久性标记以前总是位于眼镜镜片的正面。因此,在将永久性标记施加在眼镜镜片的凹面上的情况下,眼镜师的规范规定,在当垂直于前表面从无限远观看眼镜镜片的镜片中点时永久性标记出现在眼镜镜片的正面上的地方在眼镜镜片的凸形正面上对眼镜镜片打点(即做标记)。(此处的镜片中点是两个永久性标记之间的中间点,也就是说erp。实际上,代替从无限远处观看,保持至少400毫米的观看距离就足够了)。相比之下,可以在正面上直接在标记上对fsp眼镜镜片打点。
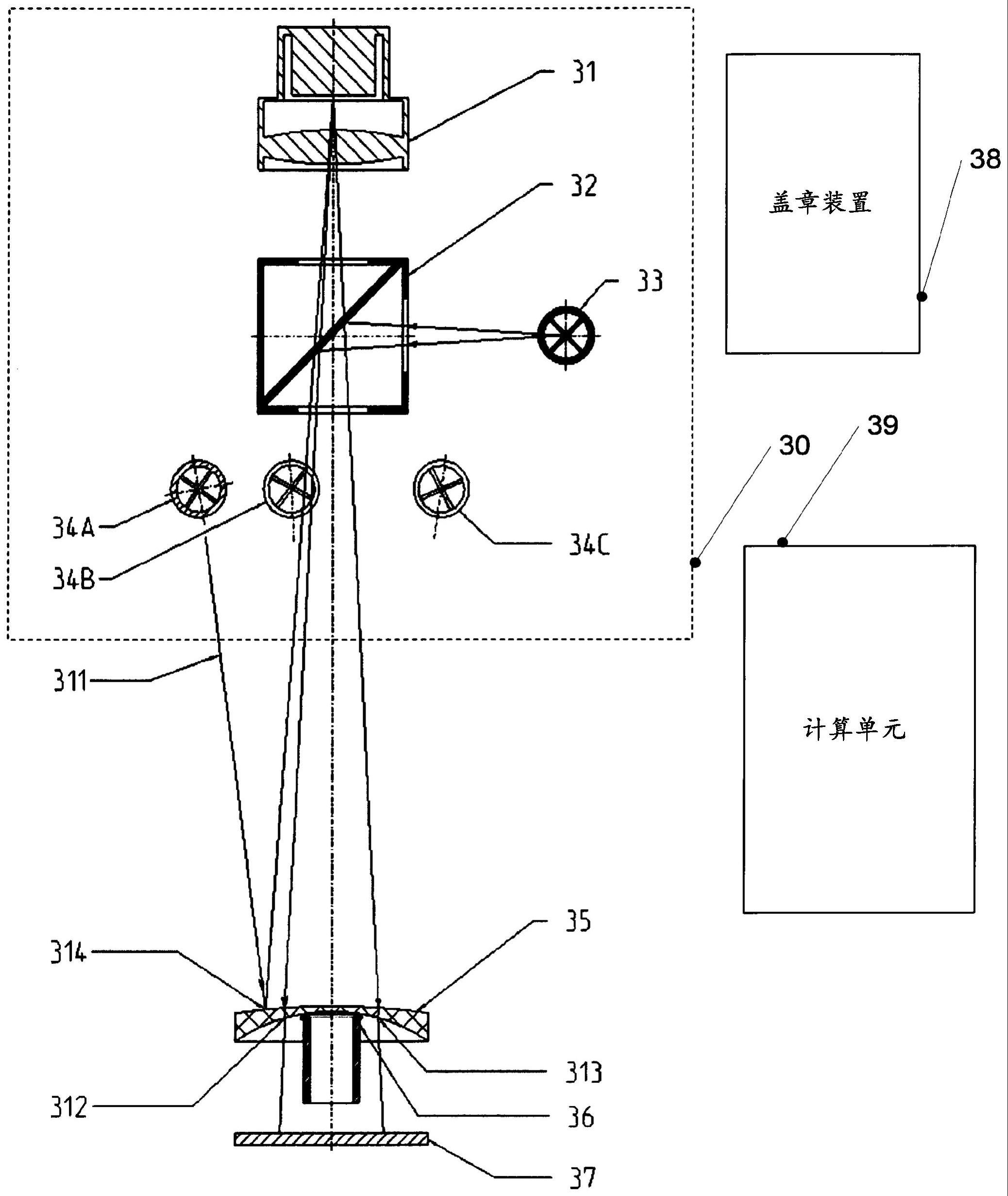
26、当在自动化装置中施加盖章时,通过凹面上的吸力固持眼镜镜片,也就是说,在渐进式镜片情况下,例如通过吸力固持器固持眼镜镜片的背面。在这种情况下,固持点的横向位置,也就是说吸力固持器轴线与眼镜镜片的后表面之间的交点,以及眼镜镜片的取向是未知的。以这种方式通过吸力固持的眼镜镜片的位置和取向是由吸力固持器与眼镜镜片之间复杂的相互作用引起的。它们取决于固持点。techoptics公司以“x-cube”的名称出售一种用于施加盖章并使用吸力固持器的装置,参见www.techofrance.com/x-cube.html。
27、在将眼镜镜片精确地固持在中心的情况下,吸力固持器的方向仍非常好地与通过吸力固持在吸力固持器的中点处的眼镜镜片的凹形背面的法向对应。如果以偏心的方式固持眼镜镜片,则眼镜镜片的重量在吸力固持器上产生力矩,吸力固持器因此有些屈服。因此,然后可以以倾斜的方式使眼镜镜片坐于吸力固持器上。
28、在大多数情况下,眼镜镜片的背面不是球面的。如果是复曲面,则通过吸力固持的眼镜镜片的取向在甚至更大程度上是不确定的。从对称性考虑因素上,可以推论出当通过吸力固持复曲面表面时,吸力固持器的方向仍大致在吸力固持器的中点处的法向上。由于重力、特别是由眼镜镜片的重量而产生的力矩,再次引起与其的偏差。然而,与通过吸力固持球面表面的情况不同,吸力固持器对在子午线区段和旋转区段中的力矩屈服程度不同。
29、具体地,在复曲面表面和其上的吸盘的垂直取向的情况下,柱镜轴位平行于吸力固持器方向的柱面表面的截面图形是沿z方向的大致正弦曲线。将参考图1a至图1d对此进行简要解释。
30、图1a示出了作为眼镜镜片的凹形背面的实例的复曲面表面10的图示。附图标记11示出了具有复曲面表面的圆柱体的截面。圆柱体代表吸力固持器。在图1a的情况下,复曲面表面垂直于表示吸力固持器的圆柱体定向。沿着截面11,沿z方向的高度如图1b中的曲线12所示。图1c示出了圆柱体在表面10上的非垂直取向,这产生截面线13。在图1d中,曲线14示出了沿着所述截面线13的高度。
31、与曲线12相比,曲线14明显不是正弦曲线,也就是说,它明显偏离正弦形状。
32、在图2a和图2b中再次图示了这种效果,即高度沿截面曲线的变化。图2a图示了一族曲线15,其中,这族曲线15中的各个曲线示出了沿截面线(例如12或13)在z方向上的高度分布,该高度分布沿表面10上的x方向在线与线之间偏移了2毫米。类似地,在图2b中,一族曲线16示出了在y方向上以1毫米为步长(在图1a和图1c中示出了x方向和y方向)的位移的情况下的高度分布。由于所使用的吸力固持器的弹性,所示出的曲线的峰和谷在通过吸力固持期间相互补偿。最终确立了图1a和图1b中通过吸力固持的大致垂直方向。
33、在自由形式表面的情况下,例如在渐进式眼镜镜片的背面上的渐进表面的情况下,关系更加复杂。在这种情况下,具有自由形式表面的圆柱体的截面曲线的确可以是仍与图1a至图1d和图2a和图2b中的复曲面表面所示的相似的图形,但不再恰好是这种类型的图形。沿截面线在z方向上的“峰”和“谷”的宽度不再相同。因此,在渐进表面的情况下,建立了通过吸力固持的方向,该方向更加难以预测,并且不仅取决于渐进表面的形状,而且还在很大程度上取决于吸力固持器的机械特性。因此,不容易预测眼镜镜片在吸力固持器上的确切空间位置。
34、如上所解释的,如果将永久性标记施加在眼镜镜片的背面上,则永久性标记会在取决于眼镜镜片进行光折射的位置出现在打算施加盖章的眼镜镜片的正面上。这个位置可以取决于取向而变化。如果在测量中忽视镜片的姿势,则使盖章的准确定位更加困难或不可能。
35、ep 1 646 855 b1和ep 2 597 451 a2各自披露了一种方法和照明布置,利用该照明布置可以使永久性标记可见并可以由相机检测。然而,由于上述光折射效应,因此检测到的永久性标记的位置不同于永久性标记的实际位置,并且特别取决于固持器上的眼镜镜片的取向。在本技术的上下文中,相机图像中的永久性标记的位置(主要由这种装置确定)也被称为“表观位置”。
36、de 103 00 777 a1描述了基于永久性标记(在此称为雕刻物标记)对眼镜镜片定心。在那种情况下,同样由于光折射的影响,可能发生的是检测到雕刻物标记的表观位置偏离实际位置。
37、本发明从其出发的de 10 2007 037 730 a1通过在眼镜镜片的正面和眼镜镜片的背面两者上施加标记来解决这个问题。然后,在了解三维位置关系的情况下,可以正确地定位眼镜镜片。
38、在那种情况下不利的是,为此,必须在眼镜镜片的正面和眼镜镜片的背面上均施加标记,这在准确的位置要求的情况下可能很复杂,并且de 10 2007 037 730 a1的过程仅可以用于特别是以那种方式设有标记的眼镜镜片的情况,而不用于如上所述仅设有永久性标记的常规眼镜镜片的情况。
技术实现思路
1、因此,根据本发明的不同方面,本发明的总体目的是提供用于确定眼镜镜片在固持器(例如,上所述的吸力固持器)上的位置和/或取向的方法和装置,其也适用于仅以常规方式设有永久性标记的眼镜镜片。另外,本发明的目的是,即使眼镜镜片以倾斜或旋转的方式位于固持器上,也可以在正确的位置上对眼镜镜片施加盖章。
2、de 10 2014 005 281 a1描述了一种根据权利要求1、72、24和82以及还有62和100的前序部分所述的用于非接触检测至少一个设有标记的眼镜镜片在三维空间中的位置的装置和方法。根据de 102014 005 281 a1的教导,眼镜镜片由两个在空间上不同布置的相机照射和记录。确定标记的真实位置,其中,可以在透射过眼镜镜片照射这些标记,但是眼镜镜片的标记始终面向相机。然后,在计算步骤中,从不同相机记录中确定眼镜镜片的位置。
3、de 10 2013 219 838 a1描述了用于测量物体的三个测量站的配合,物体是例如具有第一光学活性表面和第二光学活性表面的眼镜镜片,其中,眼镜镜片可以具有标记。de102013 219 838 a1描述了根据权利要求14和79、33和87、41和90以及还有50和94的前序部分所述的特征。第一测量单元通过触觉测量探针确定第一和第二光学活性表面上的三个点相对于固定坐标系的位置。在第二测量站中,通过相机记录来检测标记的真实位置。为此目的,标记必须布置在面向相机的那侧。替代实施例披露了一种上部装置和下部装置,使得可以在两侧检测眼镜镜片的标记,其中,相应装置检测在分别面向传感器的那侧上的标记的真实位置。在第三测量站中,检测第一和第二光学有效表面的形貌。
4、对于de 10 2014 005 281 a1和de 10 2013 219 838 a1两者的教导,记录标记图像的相机单元必需观察标记的真实位置,也就是说源自标记的光不会折射到相机(例如相机镜头)的第一光学有效表面。因此,每个眼镜镜片必须被定向为使得具有永久性标记的那侧被定向为朝向观察侧。这可能是不利的 - 以与上述ep 1 646 855 b1和ep 2597 451 a2的方法类似的方式 - 因为其限制了镜片元件的布置自由度并限制了安装眼镜镜片的可能性。特别是在上述背面渐进式眼镜镜片的情况下,这可能是有问题的,因为后者通常仅在背面上具有永久性标记。这些限制具有例如不能将不透明的材料用于固持器的影响,这对于材料特性可能是不利的,特别是在吸盘固持器的情况下。
5、在这种情况下,不透明材料应理解为是指在所使用的光波长范围内不透光的材料,例如因为它极大地吸收和/或反射相关光。
6、首先,下面介绍本发明的不同方面的方法。同样设置对应的装置。随后关于本发明的相应方面或其组合介绍细节和解释。
7、从de 10 2014 005 281 a1出发,本发明的第一目的是提供方法、装置和计算机程序,其能够允许确定具有永久性标记的背面渐进式眼镜镜片甚至在不透明固持器上的位置和/或取向。
8、根据本发明的第一方面,第一目的是通过如权利要求1所述的方法和如权利要求72所述的装置来实现的。从属权利要求限定了进一步的实施例,并且还限定了用于借助于计算单元实施该方法的计算机程序。
9、从de 10 2013 219 838 a1出发,本发明的第二目的是提供能够进行稳健的位置和/或取向确定的方法和装置。根据本发明的第二方面,这是通过如权利要求14所述的方法和如权利要求79所述的装置来实现的。从属权利要求限定了进一步的实施例,并且还限定了用于借助于计算单元实施该方法的计算机程序。
10、从de 10 2014 005 281 a1出发,本发明的第三目的是提供能够推断出眼镜镜片的折射特性的方法和装置。根据本发明的第三方面,这是通过如权利要求24所述的方法和如权利要求82所述的装置来实现的。从属权利要求限定了进一步的实施例,并且还限定了用于借助于计算单元实施该方法的计算机程序。
11、从de 10 2013 219 838 a1出发,本发明的第四目的是提供能够推断出眼镜镜片的折射特性的方法和装置。根据本发明的第四方面,这是通过如权利要求33所述的方法和如权利要求87所述的装置来实现的。从属权利要求限定了进一步的实施例,并且还限定了用于借助于计算单元实施该方法的计算机程序。
12、同样从de 10 2013 219 838 a1出发,本发明的第五目的是提供用于简化de102013 219 838 a1的装置和/或方法的复杂性的方法和装置。根据本发明的第五方面,这是通过如权利要求41所述的方法和如权利要求90所述的装置来实现的。从属权利要求限定了进一步的实施例,并且还限定了用于借助于计算单元实施该方法的计算机程序。
13、再一次从de 10 2013 219 838 a1出发,本发明的第六目的是能够更快速地实施de 10 2013 219 838 a1的方法,并且能够实现该方法的更高准确度。根据本发明的第六方面,这是通过如权利要求50所述的方法和如权利要求94所述的装置来实现的。从属权利要求限定了进一步的实施例,并且还限定了用于借助于计算单元实施该方法的计算机程序。
14、从de 10 2014 005 281 a1出发,本发明的第七目的是提高de 10 2014 005 281a1的方法和装置的准确度并使得能够使用不同的固持器。根据本发明的第七方面,这是通过如权利要求62所述的方法和如权利要求100所述的装置来实现的。从属权利要求限定了进一步的实施例,并且还限定了用于借助于计算单元实施该方法的计算机程序。
15、根据本发明的所有方面,提供了一种用于确定具有永久性标记的眼镜镜片在固持器上的位置和/或取向的方法,该方法包括:
16、提供眼镜镜片上的永久性标记的检测到的表观位置,
17、基于永久性标记的检测到的表观位置和与标记无关的附加信息,确定眼镜镜片的位置和/或取向。
18、根据本发明的第一方面,提供了一种用于确定具有永久性标记的眼镜镜片在固持器上的位置和/或取向的方法。该方法包括:提供眼镜镜片上的永久性标记的检测到的表观位置。另外,该方法包括基于永久性标记的表观位置和与标记无关的附加信息,确定眼镜镜片的位置和/或取向。
19、本发明的第一方面的方法的特征在于,这些永久性标记的表观位置与这些永久性标记的真实位置不同。
20、相对于de 10 2014 005 281 a1,本发明的第一方面的优点在于,不必从永久性标记的那侧实施测量。这使得可以使用不透明的固持器,例如在背面渐进式眼镜镜片的情况下的吸盘,其中在背面上施加了标记。如上所述,然后可以将渐进式眼镜镜片同样固持在背面。
21、根据本发明的第二方面,提供了一种用于确定具有永久性标记的眼镜镜片在固持器上的位置和/或取向的方法。该方法包括:检测眼镜镜片上的永久性标记的表观位置、偏心照射眼镜镜片、以及检测由偏心照射过程在眼镜镜片上引起的至少一个反射的位置。
22、另外,本发明的第二方面的方法包括基于永久性标记的表观位置和与标记无关的附加信息来确定眼镜镜片的位置和/或取向,其中,与标记无关的附加信息包括至少一个反射的表观位置。
23、本发明的第二方面的方法的特征在于,用第一光波长检测永久性标记的位置,并且通过用第二光波长的照明检测至少一个反射的位置,其中,眼镜镜片对第二光波长比对第一光波长有更高吸收率。
24、相对于de 10 2013 219 838 a1,本发明的第二方面的一个优点在于,可以可靠地区分来自眼镜镜片正面的反射与来自眼镜镜片背面的反射。
25、根据本发明的第三方面,提供了一种用于确定具有永久性标记的眼镜镜片在固持器上的位置和/或取向的方法。该方法包括:检测眼镜镜片上的永久性标记的表观位置、基于永久性标记的表观位置和与标记无关的附加信息确定眼镜镜片的位置和/或取向。
26、本发明的第三方面的方法的特征在于,从多个观察方向检测永久性标记的表观位置,其中,永久性标记的表观位置与永久性标记的真实位置不同。
27、相对于de 10 2014 005 281 a1,本发明的第三方面的一个优点是,从不同方向观察永久性标记的表观位置使得能够推断出眼镜镜片的折射特性。这在d1中没有被披露,因为在那里眼镜镜片的折射特性不重要。
28、根据本发明的第四方面,提供了一种用于确定具有永久性标记的眼镜镜片在固持器上的位置和/或取向的方法。该方法包括:检测眼镜镜片上的永久性标记的表观位置、偏心照射眼镜镜片、以及检测由偏心照射过程在眼镜镜片上引起的至少一个反射的位置。另外,本发明的第四方面的方法包括基于永久性标记的表观位置和与标记无关的附加信息来确定眼镜镜片的位置和/或取向,其中,与标记无关的附加信息包括至少一个反射的位置。
29、本发明的第四方面的方法的特征在于,从多个观察方向检测该至少一个反射的位置,其中,这些永久性标记的表观位置与这些永久性标记的真实位置不同。
30、相对于de 10 2013 219 838 a1,本发明的第四方面的一个优点在于准确度的提高和/或方法收敛更迅速的事实。由此相对于de 10 2013 219 838 a1可以提高该方法的质量和效率。
31、根据本发明的第五方面,提供了一种用于确定具有永久性标记的眼镜镜片在固持器上的位置和/或取向的方法。该方法包括:检测眼镜镜片上的永久性标记的表观位置、偏心照射眼镜镜片、以及检测由偏心照射过程在眼镜镜片上引起的至少一个反射的位置。另外,本发明的第五方面的方法包括基于永久性标记的表观位置和与标记无关的附加信息来确定眼镜镜片的位置和/或取向,其中,该与标记无关的附加信息包括眼镜镜片上的至少一个反射的位置。
32、本发明的第五方面的方法的特征在于,检测眼镜镜片上的至少一个反射的表观位置包括在眼镜镜片的移动期间重复检测。
33、相对于de 10 2013 219 838 a1,本发明的第五方面的一个优点是,不必在多面体表面上布置大量光源。可以使用单个光源实施测量。
34、根据本发明的第六方面,提供了一种用于确定具有永久性标记的眼镜镜片在固持器上的位置和/或取向的方法。本发明的第六方面的方法包括:提供眼镜镜片上的永久性标记的检测到的表观位置;以及基于永久性标记的表观位置和与标记无关的附加信息确定眼镜镜片的位置和/或取向。
35、本发明的第六方面的方法的特征在于,确定眼镜镜片的位置和/或取向包括眼镜镜片的位置和/或取向的迭代计算。
36、相对于de 10 2013 219 838 a1,本发明的第六方面的一个优点在于,该方法可以通过迭代过程被更快地实施并且同时产生更高的结果准确度。
37、根据本发明的第七方面,提供了一种用于确定具有永久性标记的眼镜镜片在固持器上的位置和/或取向的方法。本发明的第七方面的方法包括:提供眼镜镜片上的永久性标记的检测到的表观位置;基于永久性标记的表观位置和与标记无关的附加信息确定眼镜镜片的位置和/或取向。
38、本发明的第七方面的方法的特征在于,与标记无关的附加信息包括不同形状的眼镜镜片在固持器上的经计算的或实验确定的位置特性,其中,这些位置特性包括固持器的固持特征。
39、相对于de 10 2014 005 281 a1,本发明的第七方面的一个优点在于,同时考虑到固持特征,这相对于d1提高了该方法的准确度。
40、现在将在下面更详细地解释和限定本发明的不同方面的各个特征。
41、如上所述,永久性标记的表观位置是通过以下方式确定的位置:如果永久性标记被施加在眼镜镜片的背面则通过相机单元观察眼镜镜片,并且从眼镜镜片的正面实现观察。
42、例如,可以如ep 1 646 855 b1或ep 2 597 451 a2中所述检测表观位置。提供包括以下情况:可以在与确定位置和/或取向不同的位置检测永久性雕刻物的表观位置,并且与实施计算机实现的方法相比,还可以由不同的人来开始检测。举例来说,可以在远程计算机上实施本技术的上下文中的方法的计算,通过网络实现与该远程计算机的通信。
43、在这种情况下,与标记无关的附加信息应理解为是指与永久性标记的检测到的表观位置无关并且还与其他标记和这些标记的特性(比如标记的相对位置)无关的信息,例如,可以根据这些特性得出地点和/或位置。因此,这种与标记无关的附加信息不需要标记的特定位置,这些标记是比如眼镜镜片上的永久性标记。这种与标记无关的附加信息可以例如基于测量或者基于以固持器和眼镜镜片的特性为基础的计算。与实施根据本发明的方法相比,所述测量和/或可选地计算可以进而在不同的位置并由不同的人开始。
44、以这种方式,可以将本身已知的用于使用与标记无关的附加信息来检测永久性标记的表观位置的技术扩展到确定眼镜镜片的位置和/或地点的效果。与标记无关的附加信息的使用意味着不需要眼镜镜片的特定标记,并且该方法适用于具有常规永久性标记的眼镜镜片。
45、位置和/或取向可以借助于坐标系来指定,现在将对坐标系进行解释。这些坐标系也用于本技术的后续解释。眼镜镜片与坐标系(在下文中又称为眼镜镜片坐标系)相关联,在该坐标系中做出关于眼镜镜片的所有指示。所述眼镜镜片坐标系的原点(= 零点)由恰好位于永久性标记的两个(表观)位置之间的中间的点形成。这个点还被称为erp = 雕刻物参考点。如果永久性标记实际施加在凸表面上(由于上述原因,如今其相当少见,并且实际上仅在fsp镜片情况下仍然存在),则零点是前表面(= 凸表面)上的两个标记之间的最短连接曲线的实际中心点。在标记施加在眼镜镜片的背面(= 凹表面)的眼镜镜片的情况下,在从正确的方向观看时眼镜镜片的正面上的表观点在坐标系的限定中起到这部分作用。眼镜镜片坐标系的xy平面是眼镜镜片在erp处的切面。眼镜镜片坐标系的z方向对应于在眼镜镜片的背面上具有永久性标记的镜片的上述处方观看方向,并且垂直于xy平面。如果将永久性标记的(表观)位置投影到xy平面中,则其连接线确定眼镜镜片坐标系的x方向。永久性标记可通过在其附近的其他指示彼此区分开。一个被标识为“左”永久性标记,而另一个被标识为“右”永久性标记。从左到右的投影(表观)永久性标记的方向感确定x轴的计数方向。y轴位于垂直于所述x轴的xy平面 = 眼镜镜片的前表面在erp处的切面中,特别是当从前方观察时沿逆时针方向旋转90°。方便地限定z轴的计数方向,使得x轴、y轴和z轴产生右手系。眼镜镜片的位置与装置的“世界坐标系”有关,即,它与外部固定预限定的坐标系有关。取向特别地包括围绕世界坐标系的z轴的旋转角,该旋转角是将眼镜镜片的x轴的方向转换成世界坐标系的x轴所必需的。
46、固持器主要还限定了在装置中眼镜镜片的高度,这在图像识别过程中起到一部分作用。如果节省了远心镜头的高额费用,则要测量的眼镜镜片与相机之间的距离对图像的大小有一定影响。正确的设计以及必要时吸力固持器的高度位移确保在测量过程中将眼镜镜片大致固持在正确的高度。作为被确定为在erp的坐标原点的限定的结果,根据本发明的方法相对于装置中的高度方面的小的不正确定位是不敏感的,因为该方法可以考虑从眼镜镜片本身已知的特性。相比之下,简单的坐标确定仅根据两个永久性标记的坐标平均值(在相机图像中测量)(例如,从其在相机图像中的期望位置)的偏差确定横向位置,得出有误差的结果,通过根据本发明的方法避免了这些有误差的结果。
47、优选地,本发明的一些方面的方法另外包括:
48、检测永久性标记的表观位置,
49、偏心地照射眼镜镜片,
50、检测在眼镜镜片上由偏心照射过程引起的至少一个反射的位置,
51、其中,与标记无关的附加信息包括至少一个反射的位置。
52、偏心地照射眼镜镜片应理解为是指通过不位于光轴上的附加光源的照射,通过该光源检测永久性标记的位置以及然后还有反射的位置,特别是相机单元的光轴用于检测永久性标记的表观位置。在这种情况下,光轴通常表示限定穿过光学系统的光传播的假想线。在旋转对称光学系统的情况下,光轴与对称轴重合。对于比如在相机单元中使用的由镜片元件和反射镜组成的系统,光轴穿过镜片元件和反射镜的曲率中心。在这方面,也参见英语版本的维基百科中的维基百科文章“optical axis [光轴]”(截至2017年7月14日)。
53、以这种方式,可以通过使用比较简单的手段对反射进行简单的检测来获得与标记无关的附加信息。如果例如将bsp眼镜镜片以横向移位到不同位置的方式安装在吸力固持器上,则这不仅产生在检测永久性标记的位置期间基本上表现为平移的平移,而且还产生眼镜镜片的倾斜。倾斜对永久性标记的表观位置也有(虽然通常很小)附加影响。倾斜主要引起至少一个反射的检测位置的显着变化。因此,在倾斜的情况下,所检测到的永久性标记和至少一个反射的位置以不同的方式“进行”,并且这提供了关于整个眼镜镜片的姿势的与标记无关的附加信息。
54、为了检测至少一个反射的位置,可以使用与根据上述ep 1 646 855 b1或ep 2597 451 a2的用于检测永久性标记的位置相同的相机。在这些文件中,如所述的,为了检测永久性标记的表观位置,眼镜镜片通过来自光源的光通过分束器被镜面反射地反射到相机的光轴上而被相对于相机同轴地照射。这种类型的照明也称为同轴反射光照明。在ep 1646 855 b1的布置的情况下,在这个文件中使用的在同轴反射光照明下穿过眼镜镜片的光另外入射在后向反射器上,并从那里几乎自己返回到相机。在通过附加光源实现的偏心照明下穿过眼镜镜片的光在后向反射器处反射后(如果完全撞击在这个上),也会自身返回,但由于附加光源的偏心,因此不会到达此路径上的相机。最多两个眼镜镜片表面的反射都做到这一点。这种反射是否发生以及在何处发生取决于眼镜镜片表面的曲率和在测量过程中镜片的姿势。在ep 2 597 451 a2的情况下,使用旋转楔形件代替后向反射器。
55、以此方式,与ep 1 646 855 b1或ep 2 597 451 a2中的构造相比,可以通过简单的扩展来确定眼镜镜片的位置和/或取向,即设置一个或多个附加光源用于偏心照明。
56、然后可以基于比较简单的光学考虑因素来确定位置和/或取向,这些考虑因素考虑了眼镜镜片的光折射。
57、在一些示例性实施例中,特别是根据本发明的第一方面,但不限于此,由于眼镜镜片的光折射,永久性标记的表观位置可能与永久性标记的真实位置不同。
58、这具有的优点是,与确定真实位置相比之下,确定永久性标记的表观位置也可以得出有关眼镜镜片的折射特性的信息。此外,因此可以从与施加永久性标记的那侧不同的一侧测量眼镜镜片。这为固持器产生了更多的设计选项。
59、在一些示例性实施例中,特别是根据本发明的第一方面,但不限于此,固持器可以由不透明材料构成。
60、在一些示例性实施例中,特别是根据本发明的第一方面,但不限于此,固持器可以是吸力固持器。
61、这具有的优点是,可以快速且温和地安装和更换眼镜镜片,结果是,与其他类型的安装相比,可以减少实施该方法所需的时间。
62、这还可以具有以下优点:更多数量的材料可用于固持器的构造,结果是,可以改善固持器的期望的特性,例如机械特性。
63、优选地,通过多个光源来偏心地照射眼镜镜片,这产生多个反射(或者在来自眼镜镜片的正面和眼镜镜片的背面的反射的情况下的多对反射)。可以通过使用多个光源来提高确定的准确度。
64、为了扩展可测量的眼镜镜片的范围(以眼镜镜片的正面和眼镜镜片的背面的曲率为特征),并且为了进一步提高确定位置和/或取向的准确度,多个光源可以距相机单元的光轴不同距离。按照微分几何学,曲率被限定为主曲率半径的倒数;参见例如bronstein-semendjajew,taschenbuch der mathematik [数学手册],1991年第25版,第4.3章。因此,在此通过多个光源实施偏心照射过程,这些光源尤其在眼镜镜片的正面引起多个反射,通过在记录的图像中测量反射来检测这些反射的位置。
65、在这种情况下,多个光源可以交替地、例如单独地或分组相继地被激活,并且可以相继地检测对应的反射。以这种方式,可以将每个反射分配给相应的光源,这有助于计算,因为它排除由于反射分配不正确而引起的误差。多个光源的位置以及同样相机单元的位置在世界坐标系中也是已知的,并且影响确定位置和/或取向的计算。
66、如果适当地选择了组,则分组交替激活可以具有如下效果:检测至少一个反射(这里是多个反射)的位置的次数必须比存在的光源的数量少,以便能够将每个反射明确分配给相应的光源。下表格中呈现了这种过程的一个实例:
67、表格:
68、 光源检测 #1 #2 #3 #4 #5 #6 #7 #1 1 0 1 0 1 0 1 #2 0 1 1 0 0 1 1 #3 0 0 0 1 1 1 1
69、因此,在此,对于7个光源#1-#7,检测反射的位置三次(检测#1-#3),其中,在每种情况下,由“1”标识的光源均被打开,而用“0”标识的光源关闭。由光源引起的反射或反射对具有与光源相同的行为,即它们在光源打开时存在,而在光源关闭时不存在。如果将此行为写为二进制数,其中,1对应于存在反射,而0对应于不存在反射(即,例如,如果检测#1中不存在反射而检测#2和#3中存在反射,则为001),分配的光源是在上表格的其列中的三个检测中具有相同二进制数的光源(实例中的光源#4)。
70、在一般情况下,对于使用的每个光源,偏心照射过程在眼镜镜片上产生两个反射:一个在正面,一个在背面。也可能发生这些反射中的一个或两个没有在眼镜镜片上发生,例如,因为眼镜镜片太小或倾斜程度过大。在背面反射的情况下,光的折射在眼镜镜片的正面的入射点和出射点都发生。在背面反射的情况下,反射现象显然位于背面反射后面的出射点。正面和背面反射的紧密程度取决于眼镜镜片的曲率半径:如果它们非常相似,则两个反射在每种情况下都彼此靠近在一起,否则它们也彼此远离,或者两个反射之一不会发生,因为其会位于眼镜镜片的外部。然而,如果正面反射和背面反射靠近在一起,那么眼镜镜片也具有小焦度,那么两个反射之间的区别就不再那么重要了。对于眼镜镜片的每个假定的位置和取向,可以通过光线追踪来计算反射图像在相机图像中的位置(或者在多个相机的情况下:在多个相机图像中)。
71、位置和/或取向的计算优选地是迭代地执行的,并且如已经提到的,可以通过其他步骤来实施,例如偏心照射和检测至少一个反射的位置。取眼镜镜片的取向和位置的起始值作为起点。举例来说,作为基础的起始值可能不会围绕x轴和y轴倾斜,而是恰好安装在眼镜镜片的中心,并且没有围绕z轴扭转,扭转是由永久性标记的检测到的表观位置引起的。对于在随后的迭代中发生的每个姿势,已经计算了永久性标记的预期表观位置以及还有至少一个反射的预期位置。在这种情况下,预期位置是通过计算得出特定位置和取向值的位置。然后,可以通过永久性标记和至少一个反射的预期位置和检测到的表观位置之间的比较,计算眼镜镜片的扭转值以及还有偏移。为此目的,可以假定眼镜镜片的位置和取向的小改变(变化),并计算它们对永久性标记和至少一个反射的预期表观位置有什么影响。这也称为变分法,参见例如截止2017年7月14日的德语维基百科文章“variationsrechnung”[变分法]。然后,该过程包括在计算中系统地改变位置和取向,例如erp在三个方向x,y和z上的位移以及还有三个空间旋转(例如,以欧拉角或围绕世界坐标系的坐标轴表示),直到永久性标记以及可选的反射的这样计算出的位置与检测到的位置之间的偏差最小。在数学上,为此目的,可以在数值上解决最小化问题,例如,其中,例如,标记点图像的计算位置和来自这些测量确定参数的对应位置的附加反射的计算位置的(加权)平方偏差之和最小化。有多种可能过程来解决此类最小化问题。在press等人的《数值分析(numerical recipes)》,第二版(1992)中描述了一些可能性。如果如所述书籍“数值分析”中所解释的平方偏差的加权和、或其在各个迭代之间的变化下降到低于预限定阈值,则该方法结束,并且所获得的结果指示具有由该阈值决定的准确度的眼镜镜片位置和取向。
72、在一些示例性实施例中,特别是根据本发明的第六方面,但不限于此,确定眼镜镜片的位置和/或取向可以包括对眼镜镜片的位置和/或取向的迭代计算。
73、通过这样的迭代计算,可以高效地确定眼镜镜片的姿势,例如作为erp的位置以及围绕世界坐标系的轴线的倾斜和扭转。
74、除了上述设置多个光源或作为其替代方案,还可以例如通过设置多个相机单元或相继改变单个相机单元的位置,使用多个观察方向来检测至少一个反射的位置和/或永久性标记的表观位置。代替如在ep 1 646 855 b1中那样,一个相机单元带有一个相关联的分束器和一个同轴作用的光源,因此也可以设置包括相机单元和光源的多个这样的布置,以便以此方式通过光束平差法(又称为光束法区域网平差)通过立体摄影测量确定永久性标记的表观位置。这方面的详细信息可以在截至2017年7月15日的德语维基百科文章“blockbündelausgleichsrechnung [光束平差法调节]”中找到。为了确定相机单元的相对位置,相机单元可以以几种已知姿势记录具有容易在记录的图像中标识的点的物体,然后这构成系统的校准。然后可以使用此校准确定眼镜镜片的未知姿势。在这种情况下,根据ep 1 646855 b1的移动后向反射器或根据依据ep 2 597 451 a2的另一个实施例的旋转棱镜可以共同起作用用于多种布置,即,所有相机单元一起仅需要一个这种类型的单元。
75、这种使用多个观察方向也可以提高准确度或收敛速率。然后可以为每个观察方向分配至少一个用于偏心照射过程的光源,如上所解释的,这些光源进而可以交替地被激活,以便能够将反射分配给光源。然而,对于所有可以标识其在眼镜镜片上的反射图像的相机,也可以共同使用偏心照明源。
76、对于偏心照射过程,与用于检测永久性标记的表观位置的照明情况相比,可以优选使用不同的光波长。然后方便地选择偏心照射过程的光波长,使得眼镜镜片在透射时极大地吸收其光,以便可以可靠地区分来自眼镜镜片正面的折射和来自眼镜镜片背面的反射。在可见光波长范围之外,一些减反射涂层相对于可见光范围具有增大的反射率,这适于此方法。然而,对于偏心照射过程,相机单元(或者在多个相机单元的情况下:至少一个)必须对光波长的光敏感,并且其光学系统必须透射所述光。
77、相比之下,检测永久性标记的表观位置可以使用光波长,在该波长处眼镜镜片具有高透射率(因此具有低反射率,例如白光),以便因此例如在ep 1 646 855 b1的方法中使永久性标记清晰可见。
78、在一些示例性实施例中,特别是根据本发明的第二方面,但不限于此,用第一光波长检测永久性标记的位置,并且通过用第二光波长的照明检测至少一个反射的位置,其中,眼镜镜片对第二光波长比对第一光波长有更高吸收率。
79、在一些示例性实施例中,第二波长可以超出可见光波长范围。
80、这可以具有如下优点:可以如上所述地有利地选择第一波长和第二波长,以便具有期望的透射率、吸收特性和/或反射特性。
81、在一个优选的实施例中,与标记无关的附加信息此外或替代地包括固持器的固持特征。给定已知的固持器(例如,吸力固持器)和眼镜镜片的已知形状,可以至少估计眼镜镜片的位置和/或取向,也就是说,固持器具有产生眼镜镜片的特定位置和/或取向的固持特征。可以通过有限元法(例如,参见德语维基百科文章“finite-elemente-methode”[有限元法],截至2017年6月27日)来计算这些固持特征,以便计算固持取向。为了简化,也可以使用如下方法:其中将简单的直纹表面(例如球面表面和复曲面表面)的任何固持取向制成表格,固持取向即在固持器(例如吸力固持器)的中心点处的表面法线与固持方向(固持器、例如吸力固持器的对称轴)之间的空间角度。此外,预先计算当附加力矩作用在眼镜镜片上时表面的吸力特征改变的方式并将其制成表格。对于复曲面表面,可以在预测的或实验验证的固持取向之间进行插值,并且如果通过吸力将眼镜镜片固持在相应计算中假定的位置,则可以考虑由于眼镜镜片的质心位置而产生的附加力矩。
82、通过有限元计算(fe),可以计算比如吸力固持器等固持器的固持特征:这是变形较大的接触问题,而且可能还有非线性材料特性,也就是说,不属于简单的fe问题的类别。在吸力固持器情况下,这种计算需要吸力固持器的材料常数、吸力压力、要接触的材料(眼镜镜片和吸力固持器)的滑动行为以及还有接触区域的形状等。然而,可以预测一组足够大且足够紧密分度的局部替代表面的吸力特征,并将它们制成表格,在表格中包括它们相对于外部力矩的顺应性。代替渐进表面本身,对于每个固持点,然后寻求最合适的紧密预测替代表面,即根据标准(例如,最小平方和)偏离实际表面最小的替代表面,例如渐进表面,例如在与许多吸力情况的假定接触区域大致对应的环形区域中。该表格对于每个替代表面显示了通过吸力固持的替代表面的法线相对于固持器轴线的位置、在通过吸力固持的情况下固持器轴线与替代表面相交的点,并且显示了在外部力矩的影响下这个坐标如何变化、以及在外部力矩的影响下固持器轴线与表面法线之间的角度如何变化。所有这点然后使得可以通过内插法来确定保持在给定或计算的固持点的眼镜镜片的姿势。
83、预测特征表面的固持取向的内插,提供通过吸力固持的眼镜镜片表面的形状的很好近似,也可以使用其他直纹表面而不是复曲面表面来进行,例如使用二维多项式、泽尔尼多项式或泽尔尼塔蒂安多项式。关于这些功能的信息可以在bernd dörband的“analyseoptischer systeme [光学系统分析]”(dissertation,stuttgart)第4.3.1和4.3.2章(1986年)以及b.dörband、h. müller, h. gross的光学系统手册第5卷第47.8章(2012)中找到。
84、
85、选择的多项式也可以是例如具有适当上限n的二变量正规多项式。xm和ym表示眼镜镜片的中心点,aij是系数,并且n是上限。
86、一个优选的可能性是通过圆环面局部地近似眼镜镜片表面,该圆环面在与固持器接触的点处与圆环面的赤道切向地接触眼镜镜片,并且具有与眼镜镜片完全相同的主曲率。这些复曲面表面的名称例如在已经引用的《handbuch der augenoptik》的第24页及其后各页中进行了解释。对于给定的基底长度(例如20 mm或30 mm),通过沿主子午线的“矢高”方便地标识这些圆环面。然后,这将产生吸力特征的两参数内插表格,该表格主要得出眼镜镜片上的法向量与固持器的轴线之间的角度。此外还优选地确定如果由于重力,例如附加力矩作用于布置在、特别是通过吸力固持在固持器上的眼镜镜片上,固持器、特别是吸力固持器的屈服程度。由于固持特征可能取决于表面形状,因此这优选在多个方向上实施。重力和附加力矩对所考虑的固持器轴线与圆环表面之间的交点的位置也影响很小。
87、可以将固持的镜片的上述法向量制成表格,以获取适当的分度值,以便能够在其中进行内插。方便地选择分度,使得其在所有可能的固持器位置的小环境中覆盖所有常规眼镜镜片表面,以至于可以通过内插法足够准确地确定具体情况下的固持取向。合适的分度还可以取决于所使用的替代表面的类型,例如圆环面。此处必须仅针对取向的一个方向而不是针对所有可能的方向(例如,沿y轴的圆环面的子午截面)计算制表格形式,使得在这个截面中出现较小的曲率。以这种方式预先计算的固持取向会在通过吸力固持的状态下产生表面法线的方向。对于仅以在固持点旋转的方式适合预计算模型的表面(在这种情况下,固持点是固持器轴线与眼镜镜片之间的交点),因为其主要法向截面(按照微分几何学中限定,bronstein-semendjajew,taschenbuch der mathematik,第21版,第4.3章)不像列表中的替代表面那样,由于重力产生的力矩首先被变换成局部坐标系,像将固持特征制成表格的替代表面一样,然后计算表面法向量与制成表格的位置之间的方向,并将结果变换回世界坐标系。
88、因此,在非球面和非复曲面表面的情况下,在计算时,用复曲面表面替代在吸力过程中局部围绕在每种情况下要考虑的吸力点触摸的表面,该复曲面表面在与吸力固持器边缘对应的环境中以最佳可能的方式适合眼镜镜片表面,例如,在接触区域上的均方根方面,距预先计算的复曲面替代表面的距离最小。在这种情况下,仍然可能还需要局部旋转,以便针对局部替代表面,仍然可以假设例如沿y轴的曲率是较小的曲率。
89、如果然后将眼镜镜片固持在这样的点,则在大多数情况下,其重心不会居中地位于固持点下方或上方。由于重力,由重心的相对位置和眼镜镜片的重量产生的力矩的组合也起作用。借助于实验确定的附加力矩的制成表格的影响或通过有限元计算,然后可以确定由于重力引起附加倾斜作为插值。这样确定的固持取向例如可以用作上述迭代方法中的取向的起始值,然后该起始值迅速收敛,因为已经可以通过预先计算的取向为该方法预限定相对恰当的起始值。通过固持特征的这种计算也相应地在每个进一步的迭代步骤中进行。
90、吸力固持器的这些单独的固持特征或者与至少一个反射的位置相结合可以用作与标记无关的附加信息。如果仅基于固持特征和永久性标记的检测到的表观位置的确定正确度是足够的,则可以省去进一步的与标记无关的附加信息。在这种情况下,可以基于固持特征和永久性标记的检测到的表观位置,以与上述至少一个反射相同的方式实施迭代优化。此处的准确度取决于对固持器(例如吸力固持器)的机械材料特性的准确了解。
91、在一些示例性实施例中,特别是根据本发明的第六方面,但不限于此,可以基于固持特征和永久性标记的检测到的表观位置来实施迭代计算。
92、这具有的优点是,通过对固持特征的了解可以进一步提高方法的准确度。
93、材料特性的变化(例如,由于老化)会降低准确度。
94、因此,优选将固持特征与检测到的至少一个反射相组合,因为在这种组合中,至少一个反射对倾斜的反应非常敏感,从而清楚地提供有关其大小和方向的信息。而且,其保护该方法免受随着时间变化的固持器的特性的误差影响。
95、因此,在一些示例性实施例中,特别是根据本发明的第六方面,但不限于此,另外可以基于至少一个检测到的反射来实施迭代计算。
96、在这种情况下,例如在通过吸力固持在吸力固持器上的状态下,不必静态地确定偏心照明的反射的位置,而是还可以确定在引入眼镜镜片期间、例如在吸力固持器通过吸力固持期间的位置变化。为此目的,优选地,在通过吸力固持期间重复地检测永久性标记和反射的表观位置。结果,也可以表征吸力固持过程或通常表征将眼镜镜片引入到固持器中或固持器上的过程。
97、在一些示例性实施例中,特别是根据本发明的第五方面,但不限于此,如上所述,检测眼镜镜片上的至少一个反射的表观位置可以包括在眼镜镜片移动期间重复地检测。
98、在一些优选示例性实施例中,眼镜镜片的移动可以通过用吸力附接吸力固持器的过程来产生,并且与标记无关的附加信息可以包括用吸力附接在固持器上的过程的表征。
99、这具有的优点在于,在通过吸力附接在吸力固持器上的过程中,眼镜镜片的移动用于确定眼镜镜片的位置。如上所述,这当在背离检测系统的那侧上检测永久性标记的表观位置、也就是说表观位置受到眼镜镜片上的折射影响时是特别有利的。在这种情况下,可以通过在移动期间获得的数据以及通过吸力附接过程的已知特征来更准确地确定眼镜镜片的位置。
100、在一些示例性实施例中,特别是根据本发明的第六方面,但不限于此,迭代计算可以在相应迭代步骤中包括眼镜镜片的预期位置与永久性标记和至少一个反射的检测到的表观位置之间的比较。
101、这具有的优点是,如上文和下文所述,可以进一步提高方法的准确度。
102、如果存在多个观察方向,则甚至在没有吸力固持器的固持特征情况下,也可以通过“预见过程”来确定两个永久性标记的位置,但是不是那么精确。以此方式相对良好地获得两个永久性标记的空间位置。然而,以这种方式,相对于标记点的两个(表观)位置之间的连接线横向倾斜只能被确定得很差,直至根本无法确定。此时,来自固持器特征的附加反射或与标记无关的附加信息开始起作用:如上文已经解释的,它们主要还得出镜片围绕两个(表观)标记的连接线的倾斜。
103、该方法可以用于正确地在眼镜镜片上对盖章定向。在这种情况下,确定眼镜镜片的位置和/或取向使得可以实施盖章的准确定位。
104、换句话说,位置和/或取向的确定使得可以补偿由于表观位置与实际位置之间的差异而引起的误差
105、- 如果检测表观位置时的观察方向没有以正常方式而是倾斜地观看眼镜镜片的光学中心点,这是由于眼镜镜片在固持器上的取向引起的。如所解释的,这特别是在眼镜镜片被吸力固持器固持时发生。
106、- 如果检测表观位置(例如通过相机)是在有限的距离内、特别是比上述400毫米短的距离内进行的,和/或
107、- 将眼镜镜片的永久性标记施加在其背面上,其中,从眼镜镜片的正面检测表观位置。
108、具体地,出现在眼镜镜片的正面上的永久性标记的表观位置取决于观看方向,并且如果没有从无限远处观看眼镜镜片,则还取决于眼镜镜片的位置。
109、此外,提供了一种用于确定眼镜镜片在固持器上的位置和/或取向的装置。
110、该装置包括提供单元,该提供单元用于提供永久性标记的检测到的表观位置。该装置还可以包括检测单元,该检测单元用于检测眼镜镜片上的永久性标记的表观位置。其特征为计算单元,该计算单元用于基于所提供的永久性标记的检测到的表观位置和与标记无关的附加信息确定眼镜镜片的位置和/或取向。
111、该装置可以根据已经讨论的方法通过使用与标记无关的附加信息来确定位置和/或取向。
112、优选地,该装置包括一个或多个用于偏心照射眼镜镜片的照明单元,其中,检测单元此外被配置为检测由偏心照射过程引起的至少一个反射的位置作为与标记无关的附加信息。优选地,该装置包括多个这样的光源,特别优选地,这些光源在空间上布置成距用于检测永久性标记的检测单元的光轴的距离不同。装置的这种配置对应于以上解释的方法,其中至少一个反射被用作与标记无关的附加信息。在这种情况下,用于确定位置和/或取向的计算单元被配置用于基于永久性标记的位置和至少一个反射的位置来确定眼镜镜片的位置和/或取向。
113、替代地或此外,该装置可以将固持器的固持特征如上面针对该方法详细解释的那样用作与标记无关的附加信息。所述固持特征可以存储在装置的存储器中,或者可以经由比如互联网等通信网络从服务器检索。
114、像上面相应地讨论的方法一样,该装置能够简单地确定眼镜镜片的位置和/或取向,在此基础上,然后可以实施比如施加盖章等进一步的步骤。
115、在这种情况下,计算单元特别地可以是相应编程的计算机。相应地,还提供了一种计算机程序,当在处理器上被执行时,该计算机程序控制并实施上述方法之一。
- 还没有人留言评论。精彩留言会获得点赞!