一种基于数字化应用的载玻片检测定位系统及方法与流程
本发明涉及大数据,具体为一种基于数字化应用的载玻片检测定位系统及方法。
背景技术:
1、载玻片是实验室中用于显微镜观察的玻璃或石英片,其可以用于承载和固定需要观察的样品;通过特殊的涂层处理或印刷技术可以在载玻片上进行数据记录;其在生物学、医学、病理学、组织学等领域被广泛应用;
2、现有技术下,人们通过载玻片自动检测仪能够在一定程度上代替人工进行载玻片的观察和数据分析工作;然而,该仪器很大程度上较为依赖载玻片的空间位置摆放正确配合;这往往会存在当人工进行载玻片位置摆放时,由于疏忽等原因造成载玻片的位置摆放存在偏差或错误,就会导致仪器在对载玻片上的数据进行扫描时存在缺漏或是无法扫描观察目标;这种情况会对载玻片观察工作造成极大的干扰。
技术实现思路
1、本发明的目的在于提供一种基于数字化应用的载玻片检测定位系统及方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:
3、一种基于数字化应用的载玻片检测定位方法,该方法包括以下步骤:
4、s100、在载玻片检测台上装置定位光束源,通过定位光束源对载玻片进行初始检测定位,通过传感设备对定位数据进行实时传输至检控单元;
5、s200、检控单元根据载玻片初始定位数据,对当前载玻片的置放方阵进行空间评估,分析初始位置的偏移程度,根据分析结果对载玻片进行自适应矫位调控;
6、s300、对矫位后的载玻片进行数据扫描提取,通过载玻片定位矫位数据结合载玻片扫描数据对载玻片检测仪的数据提取扫描路径进行动态规划调整和扫描数据进行差项处理;
7、s400、将载玻片定位数据、载玻片检测仪对应载玻片检测路径数据和扫描数据进行存储,并将扫描数据进行输出。
8、所述s100在载玻片检测台上装置定位光束源,通过定位光束源对载玻片进行初始检测定位,通过传感设备对定位数据进行实时传输至检控单元:
9、s101、预先在载玻片检测台装置定位光束源,所述载玻片检测台由载玻片承载台面和显微镜检测仪构成;其中定位光束源分别在载玻片承载台和显微镜检测仪均进行装置;所述定位光束源发射一组均匀的弱激光光束进行定位检测;
10、s102、在载玻片承载台面的二维平面中,任取一水平侧边与任一相邻垂直侧边装置定位光束源;通过在水平侧边与其相邻垂直侧边平移定位光束源对载玻片进行初始位置数据进行检测,将检测数据进行采集并通过传感设备进行实时数据传输至检控中心;以显微镜检测仪的扫描中心点为矫位点,通过以矫位点为参考点,在显微镜检测仪的扫描镜头周边装置定位光束源,对显微镜检测仪在载玻片的扫描位置方位进行定位检测,将检测数据进行采集并通过传感设备进行实时数据传输至检控中心;所述传感设备为iot传感器。
11、所述s200检控单元根据载玻片初始定位数据,对当前载玻片的置放方阵进行空间评估,分析初始位置的偏移程度,根据分析结果对载玻片进行自适应矫位调控的步骤如下:
12、s201、所述检控中心接收载玻片的初始定位数据,通过载玻片初始定位数据对载玻片的置放方阵进行空间位置评估,其评估步骤如下:
13、s201-1、利用载玻片承载台所装置的定位光束源对载玻片进行侧边边缘确定,利用两个定位光束源的垂直角度关系,对载玻片的平面位置进行数字化确定;
14、s201-2、将载玻片承载台通过投影构建空间云坐标系统,以载玻片承载台的两束定位光束为动态坐标基轴,通过将定位光束从起始点对载玻片进行平移逼近获取当前载玻片初始位置与两定位光束构建的偏移三角形;所述起始点为载玻片承载台上装置定位光束源侧边的任一端点;
15、s201-3、通过偏移三角形对当前载玻片初始位置的偏移角度进行计算,其计算公式为;其中为偏移角度,为偏移三角形的斜边长度,为偏移角相邻垂直边的长度;由于定位光束之间为垂直关系,因此构建的偏移三角形为直角三角形,则在取偏移角时取两个锐角中角度较小的锐角为偏移角,这是因为在进行位置矫正时,能够通过较少的矫正操作对载玻片的偏移位置进行调整;
16、s201-4、通过对当前载玻片在载玻片承载台平面上的初始位置偏移角进行评估,若,则由人工进行载玻片初位置重摆放,并进行初始位置重分析;若,则由载玻片承载台自动矫位系统对当前载玻片偏移情况进行自适应矫位操作;若,则载玻片初位置无需矫位操作;其中为系统预设偏移角度;
17、s202、通过装置在显微镜检测仪的扫描镜头周边的定位光束源对载玻片发射的定位光束,获取定位光束在载玻片承载台平面的定位点坐标,通过对坐标进行空间错位确定,判断是否对当前显微镜检测仪位置进行矫位操作,其判断方式为当前显微镜检测仪观测点a是否存在于载玻片位置矩阵中;若,则当前显微镜检测仪观测点存在于载玻片位置矩阵中,无需对显微镜检测仪进行矫位操作;若,则当前显微镜检测仪观测点不存在于载玻片位置矩阵中,对显微镜检测仪进行矫位操作;其中,观测点a的坐标为或或,载玻片位置矩阵a为;其中i为显微镜检测仪的扫描镜头周边的定位光束源到扫描镜头中心的距离,、、和分别为载玻片边缘端点的坐标;观测点坐标是根据定位光束源装置的位置决定的,因此其坐标虽是唯一的,但在位置不确定的情况下存在多种情况;载玻片位置矩阵是由载玻片的四个端点的坐标构建的位置矩阵,这是因为其余坐标均存在于这4个端点之内;
18、s203、通过装置在载玻片承载台侧边的机械夹推装置对载玻片的初始偏移位置进行矫正;所述机械夹推装置折叠收纳于载玻片承载台边缘,当进行载玻片位置矫正时,将其释放并利用其终端夹臂对载玻片进行固定和偏移角度调整;通过移动显微镜检测仪的观察显微镜的位置对载玻片的观察点进行调整;所述显微镜检测仪的观察显微镜顶部连接有支持延伸和转向的连接杆。
19、所述s300对矫位后的载玻片进行数据扫描提取,通过载玻片定位矫位数据结合载玻片扫描数据对载玻片检测仪的数据提取扫描路径进行动态规划调整和扫描数据进行差项处理的步骤如下:
20、s301、在对载玻片和观察显微镜完成矫位后,利用观察显微镜对载玻片进行数据扫描提取;在载玻片承载台坐标面中获取当前观测点坐标和对应载玻片观察目标的坐标矩阵;通过判断当前观测点坐标是否存在于载玻片观察目标的坐标矩阵;若存在,则以当前观测点坐标为显微镜数据扫描起始点,采用邻接遍历法对当前观察目标的坐标矩阵进行全扫描;若不存在,则通过计算当前观察点与观察目标的距离,其计算公式为;其中v为当前观察点与观察目标的距离;取为最小平移距离,将当前观测点平移至观察目标的坐标矩阵中,则以当前观测点坐标为显微镜数据扫描起始点,采用邻接遍历法对当前观察目标的坐标矩阵进行全扫描;所述邻接遍历法为以当前点坐标为起始点,通过对相邻坐标点进行分析计算,生成一条将目标区域内所有坐标点进行不重复且全遍历的移动路径;
21、s302、通过显微镜对载玻片观察目标的坐标矩阵进行全遍历,并在每个坐标点处进行观察目标图像数据提取;将提取的图像数据根据对应的观察目标坐标进行标记处理,并将处理后的图像数据传输至图解分析单元;
22、s303、在图解分析单元中,将接收的图像数据根据其对应的坐标数据进行相对空间位置还原;通过差项处理将还原后的图像数据通过平移拼接,将相邻图片中的重复图像数据进行对照融合覆盖,对图像重合覆盖区域像素点进行数据降维计算,其计算公式为;其中为在图像像素点坐标处降维后的像素值,为在图像像素点坐标相邻两图像对照融合覆盖后的像素值,为在图像像素点坐标相邻两图像对照融合覆盖前的像素值;由于在对载玻片观察目标进行全遍历扫描,会导致扫描采集的目标图像数据在多数上存在重复的部分,这些重复的数据在进行分析和观察时,会造成分析计算量的增多且存在数据干扰,因此对重复部分通过覆盖并利用前后对应像素点的数据变化进行降维计算,可以减小干扰;
23、s304、通过对采集图像均进行图像数据拼接降维操作,将采集的多图像数据融合为载玻片观察目标的综合微观图像数据。
24、所述s400将载玻片定位数据、载玻片检测仪对应载玻片检测路径数据和扫描数据进行存储,并将扫描数据进行输出:
25、s401、将载玻片观察目标的综合微观图像数据进行端口输出;
26、s402、以时间点作为索引将当前载玻片定位数据、载玻片检测仪对应载玻片检测路径数据、扫描数据和图像分析数据进行日记周期存储。
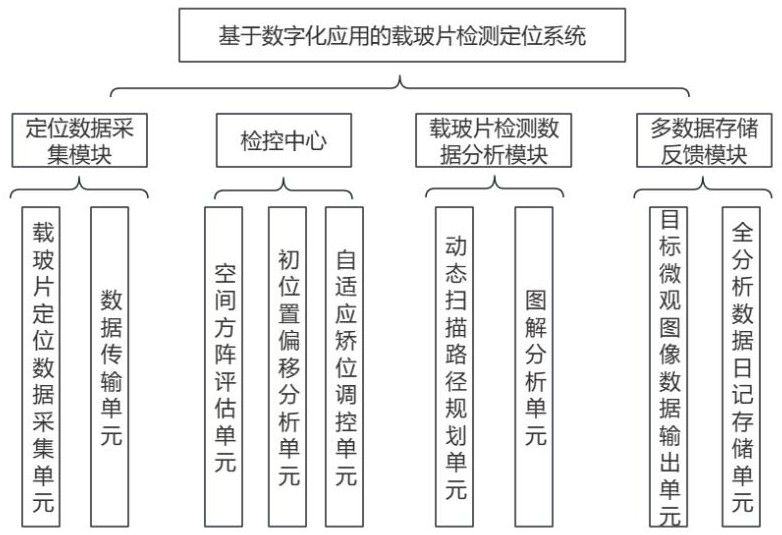
27、一种基于数字化应用的载玻片检测定位系统,所述系统包括定位数据采集模块、检控中心、载玻片检测数据分析模块和多数据存储反馈模块;
28、所述定位数据采集模块通过在载玻片检测台装置的定位光束源对载玻片进行初始检测定位,通过传感设备对定位数据进行实时传输至检控单元;所述检控中心根据载玻片初始定位数据,对当前载玻片的置放方阵进行空间评估,分析初始位置的偏移程度,根据分析结果对载玻片进行自适应矫位调控;所述载玻片检测数据分析模块对矫位后的载玻片进行数据扫描提取,通过载玻片定位矫位数据结合载玻片扫描数据对载玻片检测仪的数据提取扫描路径进行动态规划调整和扫描数据进行差项处理;所述多数据存储反馈模块将载玻片定位数据、载玻片检测仪对应载玻片检测路径数据和扫描数据进行存储,并将扫描数据进行输出。
29、所述定位数据采集模块包括载玻片定位数据采集单元和数据传输单元;所述载玻片定位数据采集单元预先在载玻片检测台装置定位光束源,所述载玻片检测台由载玻片承载台面和显微镜检测仪构成;其中定位光束源分别在载玻片承载台和显微镜检测仪均进行装置;所述定位光束源发射一组均匀的弱激光光束进行定位检测;在载玻片承载台面的二维平面中,任取一水平侧边与任一相邻垂直侧边装置定位光束源;通过在水平侧边与其相邻垂直侧边平移定位光束源对载玻片进行初始位置数据进行检测并采集;以显微镜检测仪的扫描中心点为矫位点,通过以矫位点为参考点,在显微镜检测仪的扫描镜头周边装置定位光束源,对显微镜检测仪在载玻片的扫描位置方位进行定位检测并采集;所述数据传输单元将采集数据通过传感设备进行实时数据传输至检控中心;所述传感设备为iot传感器。
30、所述检控中心包括空间方阵评估单元、初位置偏移分析单元和自适应矫位调控单元;所述空间方阵评估单元利用载玻片承载台所装置的定位光束源对载玻片进行侧边边缘确定,利用两个定位光束源的垂直角度关系,对载玻片的平面位置进行数字化确定;将载玻片承载台通过投影构建空间云坐标系统,以载玻片承载台的两束定位光束为动态坐标基轴,通过将定位光束从起始点对载玻片进行平移逼近获取当前载玻片初始位置与两定位光束构建的偏移三角形;所述起始点为载玻片承载台上装置定位光束源侧边的任一端点;通过偏移三角形对当前载玻片初始位置的偏移角度进行计算;通过对当前载玻片在载玻片承载台平面上的初始位置偏移角进行评估;所述初位置偏移分析单元通过装置在显微镜检测仪的扫描镜头周边的定位光束源对载玻片发射的定位光束,获取定位光束在载玻片承载台平面的定位点坐标,通过对坐标进行空间错位确定,判断是否对当前显微镜检测仪位置进行矫位操作,其判断方式为当前显微镜检测仪观测点是否存在于载玻片位置矩阵中;所述自适应矫位调控单元分别根据上述空间方阵的评估结果和初位置偏移分析结果对载玻片和观察显微镜的初始位置进行矫正需求判断,并根据判断结果进行对应矫正操作;通过装置在载玻片承载台侧边的机械夹推装置对载玻片的初始偏移位置进行矫正;所述机械夹推装置折叠收纳于载玻片承载台边缘,当进行载玻片位置矫正时,将其释放并利用其终端夹臂对载玻片进行固定和偏移角度调整;通过移动显微镜检测仪的观察显微镜的位置对载玻片的观察点进行调整;所述显微镜检测仪的观察显微镜顶部连接有支持延伸和转向的连接杆。
31、所述载玻片检测数据分析模块包括动态扫描路径规划单元和图解分析单元;所述动态扫描路径规划单元在对载玻片和观察显微镜完成矫位后,利用观察显微镜对载玻片进行数据扫描提取;在载玻片承载台坐标面中获取当前观测点坐标和对应载玻片观察目标的坐标矩阵;通过判断当前观测点坐标是否存在于载玻片观察目标的坐标矩阵;若存在,则以当前观测点坐标为显微镜数据扫描起始点,采用邻接遍历法对当前观察目标的坐标矩阵进行全扫描;若不存在,则通过计算当前观察点与观察目标的距离;取最小平移距离,将当前观测点平移至观察目标的坐标矩阵中,则以当前观测点坐标为显微镜数据扫描起始点,采用邻接遍历法对当前观察目标的坐标矩阵进行全扫描;所述邻接遍历法为以当前点坐标为起始点,通过对相邻坐标点进行分析计算,生成一条将目标区域内所有坐标点进行不重复且全遍历的移动路径;通过显微镜对载玻片观察目标的坐标矩阵进行全遍历,并在每个坐标点处进行观察目标图像数据提取;将提取的图像数据根据对应的观察目标坐标进行标记处理,并将处理后的图像数据传输至图解分析单元;所述图解分析单元将接收的图像数据根据其对应的坐标数据进行相对空间位置还原;通过差项处理将还原后的图像数据通过平移拼接,将相邻图片中的重复图像数据进行对照融合覆盖,对图像重合覆盖区域像素点进行数据降维计算;通过对采集图像均进行图像数据拼接降维操作,将采集的多图像数据融合为载玻片观察目标的综合微观图像数据。
32、所述多数据存储反馈模块包括目标微观图像数据输出单元和全分析数据日记存储单元;所述目标微观图像数据输出单元将载玻片观察目标的综合微观图像数据进行端口输出;所述全分析数据日记存储单元以时间点作为索引将当前载玻片定位数据、载玻片检测仪对应载玻片检测路径数据、扫描数据和图像分析数据进行日记周期存储。
33、与现有技术相比,本发明所达到的有益效果是:本发明通过多模块作用实现了对载玻片进行数据观察扫描和分析的全过程;其中本发明在对载玻片进行观测之前多了一步定位检测的程序,通过对载玻片和观察显微镜进行初位置自检测和自适应位置矫正能够一定程度上规避由人工诱发问题所带来的观察失败的结果;其次本发明在后续载玻片观察目标图像数据提取和处理过程中通过动态规划路线实现全数据扫描的同时能够对扫描数据进行降维处理,在减少分析数据量和干扰的同时能够最大程度的呈现观测目标的图像数据。
- 还没有人留言评论。精彩留言会获得点赞!