本发明涉及散射介质光学成像领域,属于计算光学成像领域,尤其涉及一种基于复虚拟点扩展函数的散斑相关散射成像方法。
背景技术:
1、散射成像是一种通过分析光在介质中传播过程中的散射现象来进行成像的技术。在不同介质,光的传播会受到介质不均匀性的影响,产生瑞利散射、米氏散射以及非弹性散射等多种复杂的散射现象。这些散射过程对传统成像技术构成了巨大挑战,尤其是在高度散射的介质中,如生物组织或雾霾环境,成像质量往往显著降低。因此,在散射成像中,相位信息对于重建高质量图像至关重要。然而,由于相位信息在散射过程中容易丢失或变得复杂,直接测量变得极为困难,相位恢复问题显得尤为关键。
2、相位恢复算法能够有效提升散射成像的分辨率和对比度,从而提高图像的整体质量。这在医学成像中尤为重要,例如在乳腺成像和脑成像中,能够更清晰地显示病变组织,有助于早期诊断和治疗。目前已有的散射成像相位恢复技术主要包括迭代算法、傅里叶变换光学方法和基于深度学习的技术。迭代算法,如gerchberg-saxton算法和fienup算法,通过反复更新相位和振幅信息来逐步逼近真实图像,但这类方法通常需要大量计算,而且容易陷入局部最优解。傅里叶变换光学方法利用光的衍射和干涉原理,通过傅里叶变换获取相位信息,但对实验条件要求严格,噪声敏感性较高。近年来,基于深度学习的方法逐渐兴起,通过训练神经网络从大量数据中学习相位恢复的规律,这种方法具有较强的泛化能力和计算效率,但依赖于大量高质量的训练数据,且网络训练过程复杂,参数调整困难。
3、针对以上问题,本发明提出一种基于复虚拟点扩展函数的散斑相关散射成像方法,实现了透过散射介质成像。该系统利用光强传输方程技术对散斑图求解进而恢复散射介质的相位信息,通过相位型空间光调制器pslm(phase spatial light modulator)进行相位调制,将求解的系统虚拟点扩展函数vpsf(virtual point spread function)的复振幅与物体散斑复振幅互相关成像。该方法无需迭代,具有速度快和精度高的优点。
技术实现思路
1、本发明的目的是提出一种基于复虚拟点扩展函数的的散斑相关散射成像方法,以实现透过散射介质的高效及高精度成像。
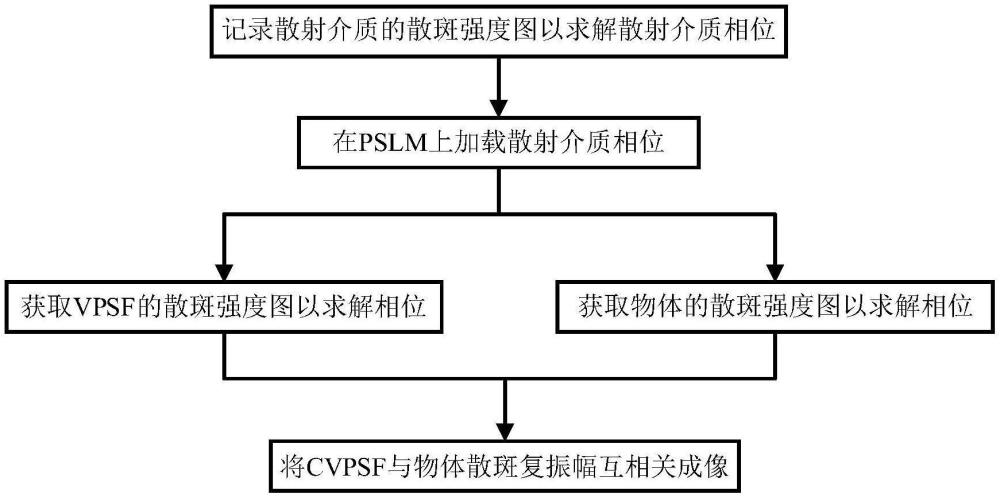
2、本方法包括以下五个步骤:s1,记录透过散射介质的散斑强度图以求解散射介质的相位;s2,在相位型空间光调制器pslm上加载散射介质的相位;s3,记录理想物点虚拟点扩展函数vpsf的散斑强度图以求解其相位;s4,记录物体的散斑强度图以求解其相位;s5,将复虚拟点扩展函数cvpsf(complex virtual point spread function)与物体散斑复振幅互相关成像。
3、为方便表示,给出光学元件缩写:分光棱镜bs(beam splitter)。
4、一种基于复虚拟点扩展函数的散斑相关散射成像方法,其具体光学系统包括:激光器(1)、衰减片(2)、显微物镜(3)、针孔(4)、第一凸透镜(5)、第二凸透镜(6)、bs(7)、成像物体(8)、pslm(9)、第三凸透镜(10)、散射介质(11)、第四凸透镜(12)和图像传感器(13)。
5、s1:记录透过散射介质的散斑强度图以求解散射介质的相位;
6、定义垂直光束传播方向的任意平面上任意一点的像素点坐标为(x,y)。
7、先将成像物体从光路中移出,激光器(1)发出光束,经过衰减片(2)调整光强,再经过显微物镜(3)与针孔(4)进行滤波,光束经过第一凸透镜(5)与第二凸透镜(6)后变为扩束的平行光束,平行光束经过bs(7)分为透射光束和反射光束,bs(7)的透射光束在pslm(9)上发生反射,反射光束经过bs(7)进行分束,其中分束的反射光经过第三凸透镜(10)聚焦到散射介质(11),经过散射介质发生散射的光经过第四凸透镜(12)入射到图像传感器(13),第三凸透镜(10)与第四凸透镜(12)构成4f系统,图像传感器(13)在聚焦位置处记录聚焦散斑强度图i(x,y,z),在离焦位置δz处记录离焦散斑强度图i(x,y,z+δz),z为平行于光束传播方向在图像聚焦位置处的轴向坐标,δz为离焦距离。
8、光强传输方程如下所示:
9、
10、其中,i(x,y,z)为聚焦平面处的强度分布,为聚焦平面处的相位分布,为强度图在z轴上的导数,为梯度算子。
11、可利用两幅轻微离焦的相邻强度分布的微分近似形式表示为:
12、
13、已知聚焦平面处的强度分布i(x,y,z),通过光强传输方程求解散射介质(11)的相位φ。
14、s2:在相位型空间光调制器pslm上加载散射介质的相位;
15、将上述s1中求解的散射介质(11)相位φ加载到plsm(9)上。
16、s3:记录理想物点虚拟点扩展函数vpsf的散斑强度图以求解其相位;
17、假设理想物点位于距离pslm(9)前轴向位置zm处,在plsm(9)上加载波前s(x,y,zm),经过plsm(9)相位调制后,分别在轴向距离z和z+δz处采集聚焦vpsf散斑强度图ivpsf(x,y,z)以及离焦vpsf散斑强度图ivpsf(x,y,z+δz)。
18、经计算得到通过光强传输方程求解vpsf的相位φvpsf。
19、s4:记录物体的散斑强度图以求解其相位;
20、将成像物体放入光路距离pslm(9)前轴向位置zm处,在plsm(9)上仅加载s2中求解的散射介质(11)相位φ,分别在轴向距离z和z+δz处采集物体聚焦散斑强度图io(x,y,z)以及物体离焦散斑强度图io(x,y,z+δz)。
21、经计算得到通过光强传输方程求解物体散斑相位φo。
22、s5:将复虚拟点扩展函数cvpsf与物体散斑复振幅互相关成像;
23、已知在聚焦平面处采集的散斑强度图ivpsf(x,y,z)以及io(x,y,z),从强度图中获取vpsf振幅avpsf以及物体散斑振幅ao,最终得到复虚拟点扩展函数uvpsf(x,y)以及物体散斑复振幅uo(x,y),如下所示:
24、uvpsf(x,y)=avpsf·exp(iφvpsf)
25、uo(x,y)=ao·exp(iφo)
26、在成像过程中,得到cvpsf的表达式如下:
27、
28、其中,φ为散射介质(11)的相位,s(x,y)为理想物点的复振幅,q(a)=exp[iπaλ-1(x2+y2)],d1为激光器(1)到pslm(9)的距离,d2为pslm(9)到图像传感器(13)的距离,“*”表示卷积运算。
29、物体散斑的复振幅表示为:
30、
31、其中,e(x,y)为物体的复振幅。
32、利用互相关算法将复虚拟点扩展函数uvpsf(x,y)与物体散斑的复振幅uo(x,y)进行互相关成像,物体强度ie(x,y)如下所示:
33、
34、其中,ue(x,y)为互相关成像的复振幅,表示互相关运算,δ表示狄拉克函数。