一种曝光机的多重均分预测对位方法和系统
本发明涉及印刷电路板制造,尤其涉及一种曝光机的多重均分预测对位方法和系统。
背景技术:
1、在现代pcb(印制电路板)制造过程中,曝光机作为图像转移的关键设备,通过将设计图像从光刻胶片精确转移到印制板上,形成电路图案,为了确保高质量的图像转移,对曝光机的光源强度、曝光时间以及图像对位精度的要求非常严格,然而,在实际操作中,由于pcb在曝光过程中的微小运动以及多次曝光过程中可能存在的叠加误差,常常导致图像模糊、对位不准等问题,这些因素直接影响了最终产品的精度和性能,因此,如何在复杂的曝光条件下保证图像的高精度对位和清晰度,成为pcb制造中的一项重要挑战。
2、现有技术中,尽管已经提出了多种对位校正方法,如静态参数调整和单次曝光校正,但在处理动态运动和多次曝光叠加误差时,这些方法的效果仍然有限,由于缺乏对pcb运动过程中引起的图像模糊的有效识别和校正机制,以及在多次曝光条件下无法有效修正叠加误差,现有技术难以满足高精度、高一致性要求的应用场景。
3、因此,迫切需要一种曝光机的多重均分预测对位方法和系统,以实现对pcb图像的精确对位和高质量转移,从而提升产品的整体性能和制造精度。
技术实现思路
1、基于上述目的,本发明提供了一种曝光机的多重均分预测对位方法和系统。
2、一种曝光机的多重均分预测对位方法,包括以下步骤:
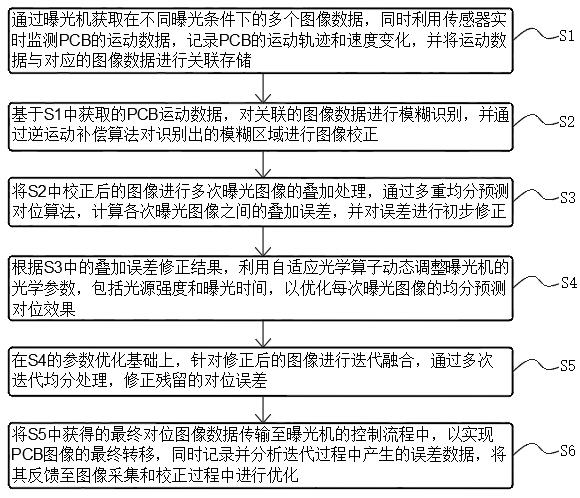
3、s1:通过曝光机获取在不同曝光条件下的多个图像数据,同时利用传感器实时监测pcb的运动数据,记录pcb的运动轨迹和速度变化,并将运动数据与对应的图像数据进行关联存储;
4、s2:基于s1中获取的pcb运动数据,对关联的图像数据进行模糊识别,并通过逆运动补偿算法对识别出的模糊区域进行图像校正;
5、s3:将s2中校正后的图像进行多次曝光图像的叠加处理,通过多重均分预测对位算法,计算各次曝光图像之间的叠加误差,并对误差进行初步修正;
6、s4:根据s3中的叠加误差修正结果,利用自适应光学算子动态调整曝光机的光学参数,包括光源强度和曝光时间,以优化每次曝光图像的均分预测对位效果;
7、s5:在s4的参数优化基础上,针对修正后的图像进行迭代融合,通过多次迭代均分处理,修正残留的对位误差;
8、s6:将s5中获得的最终对位图像数据传输至曝光机的控制流程中,以实现pcb图像的最终转移,同时记录并分析迭代过程中产生的误差数据,将其反馈至图像采集和校正过程中进行优化。
9、可选的,所述s1具体包括:
10、s11:通过曝光机的控制单元设定多个曝光条件,包括光源强度、曝光时间、曝光角度的参数,每个设定的曝光条件对应一次图像采集操作,用于获取在不同曝光条件下的多个图像数据;
11、s12:在pcb加工过程中,配置多通道高精度传感器网络,传感器包括激光位移传感器和惯性测量单元,用于实时采集pcb的运动数据,包括运动轨迹和速度变化的动态信息;
12、s13:在每次图像采集操作时,利用曝光机的同步控制机制,将采集的图像数据与传感器记录的运动数据进行同步,确保每个图像数据与对应的运动数据之间的时间关联一致;
13、s14:将同步后的图像数据与其对应的运动数据进行关联处理,生成关联标识,并将这些关联标识及其对应的图像和运动数据存储在数据存储单元中。
14、可选的,所述s2具体包括:
15、s21:基于s1步骤中获取的pcb运动数据,通过数据处理单元对pcb的运动轨迹和速度变化进行分析,并提取出pcb在不同时间点上的运动参数,包括位移、速度和加速度的信息;
16、s22:根据s21中分析得到的运动参数,对每个图像像素点在曝光过程中受到的运动影响进行计算,累积影响以识别出潜在的模糊区域,并生成对应的模糊区域图;
17、s23:基于s22中识别出的模糊区域,应用逆运动补偿算法对每个模糊区域进行计算,通过反向推导pcb的运动轨迹,对图像中每个受影响的像素进行位移校正,将模糊像素恢复至原始位置;
18、s24:将经过s23补偿校正后的图像进行输出处理,并替换掉原始的模糊图像数据,以用于后续的图像处理步骤。
19、可选的,所述s22具体包括:
20、s221:根据s21中提取的pcb运动参数,对于每个图像像素点,计算其在曝光过程中由于pcb运动所受到的位移,具体对于每个像素点在时间的运动位移和的公式表示为:
21、;
22、,其中,和分别表示像素点在图像坐标系中的横向和纵向位置;表示嚗光过程中的时间点;和分别表示像素点在时间的横向位移和纵向位移;和分别表示在时间的横向速度和纵向速度;和分别表示在时间的横向加速度和纵向加速度;表示相邻两个时间点之间的时间间隔;
23、s222:基于s221中计算得到的每个像素点的累积位移,计算其运动模糊度量,计算公式为:,表示像素点的总模糊度量;和分别表示像素点在时间的横向位移和纵向位移;和分别表示曝光开始和结束的时间点;
24、s223:将s222中计算得到的模糊度量与预设的模糊阈值进行比较,识别出所有满足条件的像素点,满足条件的像素点被标识为模糊区域;
25、s224:根据s223中识别出的模糊区域,生成对应的模糊区域图,模糊区域内的像素点在二值图像中被赋值为1,而非模糊区域的像素点则被赋值为0,从而生成一个明确标识出模糊区域的二值模糊区域图。
26、可选的,所述s23具体包括:
27、s231:基于s22步骤中识别出的模糊区域,逆向计算pcb的运动轨迹,具体对于每个受影响的像素点,根据在s221中计算得到的速度和以及加速度和,反向推导出像素点在曝光初始时刻的位置;
28、s232:利用s231中反向推导出的初始位置,对每个模糊像素点的位移进行校正;
29、s233:将s232中校正后的像素位置应用于图像数据,替换掉原始的模糊像素位置,使得图像中的所有模糊像素恢复至其原始清晰的位置。
30、可选的,所述s3具体包括:
31、s31:将s2中经过校正后的图像数据按时间顺序依次进行叠加处理,每次曝光生成的图像被分成若干个子区域,分别对应各次曝光的图像子区域按照对应的位置进行叠加,叠加后的图像区域的公式表示为:
32、,其中,表示第次曝光生成的第个子区域;表示叠加后的第个子区域;表示叠加的曝光次数;
33、s32:通过多重均分预测对位算法,对s31步骤中叠加后的图像子区域进行误差分析,具体通过计算叠加前后各个像素点之间的位移差异作为叠加误差;
34、s33:针对s32中计算得到的叠加误差,对每个子区域应用初步误差修正算法,用于调整图像的横向和纵向位移,使得所有叠加后的子区域之间的误差最小化。
35、可选的,所述s4具体包括:
36、s41:根据s3步骤中计算得到的叠加误差修正结果,生成光学参数调整数据,具体将每个子区域的叠加误差与光学参数之间的关系表示为:,其中,表示第个子区域的光学参数调整量;表示第个子区域的叠加误差;表示光学参数的初始设定值;为调整系数;表示所有子区域中最大的叠加误差;
37、s42:利用自适应光学算子对每个子区域的光学参数进行动态调整,包括光源强度和曝光时间,光学算子根据每个子区域的叠加误差自动调整其光学参数,使得所有子区域的图像均分预测对位效果得到优化;
38、s43:基于s42中调整后的光学参数,进行多次迭代优化,使得所有子区域的叠加误差逐渐减小至预设阈值以下,迭代过程中的优化公式为:,其中,表示第个子区域在第次迭代后的光学参数;表示第个子区域在第次迭代后的光学参数;和分别表示第个子区域在第次和第次迭代后的叠加误差;为迭代调整系数,用于控制每次迭代的调整幅度。
39、可选的,所述s5具体包括:
40、s51:在s4完成光学参数优化后,针对修正后的图像数据进行初始误差评估,具体对每个子区域的图像进行分析,计算残留的对位误差,计算公式为:,其中,表示第个子区域的残留对位误差;和分别表示第个子区域修正后的横向和纵向坐标;和分别表示参考坐标系中对应的位置;
41、s52:针对s51中计算的残留对位误差,通过迭代均分算法对图像进行多次迭代处理,迭代均分处理的公式为:,其中,表示第个子区域在第次迭代后的图像数据;表示第个子区域在第次迭代后的图像数据;表示参考图像数据,通过均分处理,将每个子区域的数据逐步调整至参考位置;
42、s53:在s52的基础上,对每次迭代均分后的图像进行误差修正,更新每个子区域的坐标值,并重新计算残留对位误差;
43、s54:在每次迭代后,检查所有子区域的残留对位误差是否已收敛至预设阈值以下,若所有子区域的残留对位误差满足,则停止迭代;否则,继续进行迭代均分处理,直到误差收敛为止。
44、可选的,所述s6具体包括:
45、s61:将s5中获得的最终对位图像数据通过数据接口传输至曝光机的控制流程中,传输过程包括将每个子区域的校正后图像数据按照预定数据格式进行编码,并通过高速数据总线将其发送至曝光机;
46、s62:在对位图像数据传输至曝光机控制流程后,对接收的数据进行校验,具体通过与原始图像数据进行比对,验证接收的数据是否与发送的数据一致;
47、s63:在s5的迭代过程中,实时记录每次迭代后的残留误差数据,记录的数据包括每个子区域的误差值、对应的迭代次数以及调整后的光学参数值;
48、s64:对s63中记录的误差数据进行分析,识别出误差变化的趋势和规律,并生成反馈模型,用于指导后续的图像采集和校正过程;
49、s65:利用反馈模型对曝光条件、光学参数进行预先调整,以减少初始误差。
50、一种曝光机的多重均分预测对位系统,用于实现上述的一种曝光机的多重均分预测对位方法,包括以下模块:
51、图像采集模块:用于通过曝光机获取在不同曝光条件下的多个图像数据,并利用传感器实时监测pcb的运动数据,记录pcb的运动轨迹和速度变化,将运动数据与对应的图像数据进行关联存储;
52、模糊识别模块:基于图像采集模块提供的pcb运动数据,对每个图像像素点在曝光过程中受到的运动影响进行计算,识别出潜在的模糊区域,并生成对应的模糊区域图;
53、逆运动补偿模块:基于识别出的模糊区域,应用逆运动补偿算法对每个模糊区域进行位移校正,将模糊像素恢复至其原始位置;
54、图像叠加修正模块:将校正后的图像数据进行多次曝光图像的叠加处理,通过多重均分预测对位算法,计算各次曝光图像之间的叠加误差,并对误差进行初步修正;
55、光学参数优化模块:根据叠加误差修正结果,利用自适应光学算子动态调整曝光机的光学参数,包括光源强度和曝光时间,以优化每次曝光图像的均分预测对位效果,并对光学参数进行多次迭代优化;
56、迭代融合收敛模块,基于光学参数优化后的图像数据,通过多次迭代均分处理,修正残留的对位误差,并对修正后的图像进行收敛判定,确保所有子区域的对位误差达到预设的精度要求;
57、控制反馈优化模块:将最终对位图像数据传输至曝光机的控制流程中,以实现pcb图像的最终转移,并实时记录和分析迭代过程中产生的误差数据,生成反馈模型,用于指导后续图像采集和校正过程中的光学参数优化。
58、本发明的有益效果:
59、本发明,通过整合运动数据实时分析、逆运动补偿技术、多重均分预测对位算法,以及光学参数的自适应调整,有效解决了pcb曝光过程中因微小运动引起的图像模糊和多次曝光叠加误差问题,特别是,逆运动补偿技术允许精确校正由pcb动态运动引起的图像偏移,而多重均分预测对位算法则确保了多次曝光过程中图像的精确对齐。
60、本发明,通过引入自适应光学参数调整,本发明能够根据实时误差分析结果动态调整曝光机的光源强度和曝光时间,优化了图像的质量和对位精度,这种自适应调整机制不仅减少了对位误差,还提高了整个曝光系统的灵活性和效率。
- 还没有人留言评论。精彩留言会获得点赞!