具有用于产生和检测可听声音的声学装置的机动车辆的制作方法
1.本发明涉及具有用于产生和检测可听声音的声学装置的机动车辆。
背景技术:
2.随着当前驾驶辅助系统以及半自动和自动驾驶功能的不断发展和普及,尽可能完整地检测相应机动车辆的环境或使用作为自动功能基础的传感器变得越来越重要。在此背景下,道路使用者彼此之间或相应机动车辆与其周围环境或环境的联网发挥着越来越重要的作用,以便为所有相关的道路使用者实现进一步提高的安全性和可靠性以及进一步提高的舒适度。为此目的,从众多示例中已知使用照相机、照明元件、雷达和激光雷达装置等。
3.作为进一步的方法,de 102018201 085 a1描述了一种用于机动车辆的声音产生安全系统,用于其从外部的声学感知。该系统包括多个声音发生器,这些声音发生器既设计用于产生可在机动车辆外部感知到的声音,又用于监测由声音发生器产生的声音。这些声音发生器将在相应的传感器工作中在时间上和/或彼此间交替地工作并且在相应的声音产生工作中根据在该过程中检测到的监测信号工作。
技术实现要素:
4.本发明的目的是,提高机动车辆工作时的安全性。根据本发明,该目的通过独立权利要求的主题来实现。本发明的有利设计和改进在从属权利要求、说明书和附图中说明。
5.根据本发明的机动车辆具有至少一个用于产生和检测可听声音的声学装置。这种意义上的可听声音是指其频率在人类感知声音或听到的能力范围内,例如在10hz到20khz的范围内的声波。为此,声学装置包括机动车辆的车辆部件,其具有振动区域和布置在其上的致动器,致动器用于激发和探测该车辆部件在振动区域中的振动,即该振动区域的振动。在目前的意义上,振动区域不是频率范围,而是指车辆部件的物理表面积。与相应车辆部件的邻接于振动区域或包围振动区域的区域相比或相对于该区域,对振动区域进行修改,即在至少一个方面进行不同的设计或处理,因此对在可听声音的频率范围内的激励或振动具有更大的灵敏度。
6.车辆部件优选地可以是机动车辆的外部部件,例如车身部件或附加部件。车辆部件例如可以是机动车辆的金属板覆层或塑料覆盖物、裙板或扰流板等的一部分。然而,车辆部件也可以是内部部件,即机动车辆的内部的或位于内部的部件,例如内部装饰部件或内部配件部件。
7.在任何情况下,致动器可以优选地布置在车辆部件的相应的内侧上。换言之,致动器可以透过车辆部件从外部看到,或者如果车辆部件是外部部件,则可以相对于机动车辆的周围环境隐藏。另一方面,如果车辆部件是内部部件,则可以从机动车辆的内部或乘员透过内部部件看到致动器,也就是说,它可以相对于该乘员舱隐藏。通过致动器的这种内部的或位于内部的,即隐藏的布置,一方面可以确保最大可能的设计自由度或设计灵活性。另一方面,致动器通过相应的车辆部件得到保护以防损坏,由此可以提高声学装置的可靠性。
8.根据本发明,通过主动激励车辆部件或振动区域以引起声学振动,声学装置可以用作扬声器。同样,声学装置可以通过检测或获取传递到车辆部件上的振动、空气噪声、结构噪声或震动,或借助致动器检测或探测它们来用作麦克风或传感器。因此,通过声学装置实现了两个功能。通过声学装置的这种多功能设计和使用,例如可以节省额外的麦克风或额外的扬声器。这能够降低复杂性、成本和部件费用以及机动车辆的重量。
9.特别地,如果车辆部件是机动车辆的外部部件,则因此可以实现双向通信,即在可听声音范围内与相应机动车辆的周围环境即例如与其他道路使用者或其他人或人员的双向通信。这种通信可以以各种方式有助于提高交通安全并提高车辆乘员和车外人员的舒适度。这方面的具体例子将在下面更详细地解释。
10.由于可以使用声学装置检测来自机动车辆周围环境的声波,声学装置形成了环境传感器机构,其在迄今为止通常不被传统环境传感器机构覆盖的频率或信号范围内工作。本发明因此可以有助于更全面的自动环境识别,由此可以更可靠和更安全地执行自主或半自主的驾驶或辅助功能。
11.为了操作声学装置,致动器例如可以连接到机动车辆的车载网络。以这种方式,例如可以向致动器供应能量,和/或可以将控制信号传输到致动器,和/或可以传输借助致动器探测的即记录的测量信号,例如传输到信号或数据处理装置。例如,致动器可以电磁地操作。
12.由于与车辆部件的邻接区域相比振动区域被修改,因此可以特别精确地调整振动区域的振动或频率特性。这使得能够灵活使用大量不同的车辆部件,即使它们以其传统的即未修改的形式对于在可听声音范围内的激励没有足够的灵敏度。根据相应的车辆部件,振动区域可以占据或构成相应车辆部件的相对较小的部分或区域。因此可以实现将相应的车辆部件用作声学装置的一部分,而不会例如影响或削弱相应的车辆部件的稳定性或整体刚度。此外,通过改变振动区域,必要时可以防止整个车辆部件被激发而在可听声音范围内振动。结果,尽管使用了在此提出的声学装置,也可以避免机动车辆的使用寿命或耐久性或可靠性的降低。为了修改振动区域,在目前的意义上,存在不同的可能性,其中一些将在下面更详细地解释。
13.在本发明的一个有利设计中,为了改变振动区域,它由与车辆部件的邻接区域不同的材料形成。附加地或替代地,振动区域具有与车辆部件的邻接区域不同的材料厚度,即例如垂直于相应车辆部件的主延伸表面测量的不同厚度。特别地,振动区域的材料厚度可以小于邻接区域的材料厚度。如果振动区域至少部分地由与邻接部分不同的材料或形成或制得或具有不同的材料成分,则例如可以调节振动区域的密度或单位面积重量,以便调整对于在可听声音范围内的激励的分别期望的灵敏度或调整振动区域的特定振动行为。通过振动区域的这些设计,其对在可听声音范围内的激励的灵敏度,即其振动行为或频率响应,可以有针对性地且特别精确地进行调节。由此最终可以实现对振动区域的可听声音激励的特别精确和可靠的检测,以及实现振动区域的特别简单和有效的主动激励。
14.在本发明的另一有利设计中,振动区域具有多个有不同谐振频率的结构或部分区域。因此,振动区域可以例如被划分为至少部分地或局部地彼此分开或间隔开的部分区域或表面区域。这些部分区域例如可以具有不同的尺寸、由不同的材料形成、具有不同的材料成分和/或材料厚度和/或以其他方式彼此不同。用于或具有不同谐振频率的结构或结构化
物例如可以具有在其长度上变化的宽度和/或厚度、螺旋形或蜗形的设计等。例如,这种结构可以被压印或铣削到振动区域中,集成到振动区域中,或施加到振动区域上,等等。换言之,振动区域因此可以被设计用于不同频率的共振激励。结果,可以在特别宽的频率范围上有利地调整或改善振动区域的灵敏度和动态性。这继而能够实现特别可靠和详细的生成和检测可听声音,并因此最终进一步改进声学装置的功能和其他描述的优点和特性。
15.在本发明的一种有利的改进中,部分区域形成为振动区域的具有不同尺寸和/或通过不同长度的结构元件彼此分开的表面区域。结构元件尤其可以是凹部或支柱。这样的凹部例如可以是完全穿透振动区域的材料的狭缝,或者仅仅是其中振动区域的材料厚度与其直接周围环境即部分区域相比减小的内凹或凹槽。例如,支柱可以是施加于振动区域或完全或部分嵌入或集成到振动区域中的附加组件或元件。同样,支柱例如可以是振动区域的立体区域,这些立体区域由不同的材料形成或具有与其相应的直接周围环境(即振动区域的相应邻接的部分区域)不同的材料成分。结构元件尤其可以具有细长的或棒状的设计。振动区域可以优选地具有至少基本上圆形或圆盘形的设计,其中,结构元件于是可以优选地在径向方向上延伸或布置。已经表明,使用这样的结构元件来产生或a部分区域是实现振动区域的不同谐振频率的特别简单和实用的选项。
16.在本发明的另一有利设计中,机动车辆具有多个声学装置和与其连接的数据处理装置。数据处理装置被设置成基于借助各种声学装置检测到的声音信号的组合来生成机动车辆周围环境的至少一部分的特征。特别地,数据处理装置可以被设置为将由不同声学装置产生或检测的声音信号相互关联和/或执行这些声音信号的互相关并因此计算它们。
17.在当前情况下,声学装置和数据处理装置因此形成网络,在该网络中,特定的声音信号可以由各种声学装置例如在不同时间和/或以不同强度检测。然后可以通过对这些差异的自动评估,即相应的自动化的信号处理来生成周围环境图像。例如,可以自动确定或至少估计已发出检测到的声音信号的相应声源的方向或距离。这样的周围环境图像或机动车辆周围环境的这样的表征于是可以有利地用作机动车辆的最多样化的、特别是自动的或自动化的控制或功能执行的基础。为此,可以通过数据处理装置的输出接口来输出或提供相应的表征,即例如声源的方向或距离或一些其他特定属性。同样,数据处理装置本身可以为机动车辆的一个或多个组件或辅助系统产生和输出相应的控制信号,即相应地控制它们。
18.例如,可以使用相应声音信号的频谱或信号形式或其随时间的发展来自动推断相应声源的类型和/或运动,即确定或估计它。如果例如识别到低于声源与机动车辆之间的预定最小距离或机动车辆与声源之间的预定的相对运动,则例如可以自动使机动车辆停止或转向,以避免与声源发生碰撞。
19.在本发明的另一有利设计中,声学装置被设置用于检测机动车辆的状态和/或计划的行为,并且据此产生相应的声音信号,并将其输出到机动车辆的周围环境处或中。该声音信号在此表明所检测的状态和/或所检测的计划行为,因此可以将该状态或该行为传达或转达给周围环境。由此也可以提高道路交通的安全性和舒适性,因为例如可以使机动车辆周围环境中的其他道路使用者,特别是行人或骑自行车者更难误判机动车辆的当前状态和/或当前或未来行为。例如,机动车辆或相应的声音信号可以告知另一个道路使用者:他已被机动车辆识别,并且机动车辆将相应地及时停止或在特定方向上采取规避动作以避免碰撞。结果,例如可以通知行人:他可以安全地在机动车之前穿过机动车辆行驶的道路。在
此提出的功能特别是对于自动驾驶的机动车辆或在机动车辆的自动驾驶操作中以及对于电动机动车辆可能是特别有利的,因为许多道路使用者如今还不熟悉这种机动车辆的相应自动化的行为方式,并且电动车辆比传统机动车辆更难根据其运行噪声进行正确评估。
20.如果机动车辆例如是尤其自动驾驶的出租车或客运服务车辆,则状态或相应的声音信号例如可以向在机动车辆的周围环境中等候的人告知,是否机动车辆是空的即可用,确定其是否可用于相应的等候人员,和/或类似的事项。同样,声音信号例如可以模拟或传达机动车辆的发动机噪声或运行噪声。然后可以通过对声音信号的相应设计或调制,例如,作为机动车辆状态,通报机动车辆正在减速或加速。这尤其在机动车辆是电动车辆时可以是特别有利的。最后,通过声音信号或由此实现的对机动车辆的状态和/或计划行为的说明或通报,例如可以显著地并以特别简单的方式改善在道路交通中注意力不集中、视力受损或盲人的安全性和/或舒适性。为此目的,声音信号可以以不同的方式设计,例如作为发动机噪声或运行噪声、作为信号音或信号音序列、作为旋律、作为单独的或适配的例如与特定的人约定的代码,和/或类似的事项。对于特定状态和/或特定计划的行为方式,声音信号可以优选地以预定方式标准化。这使得能够以特别简单的方式传达该状态或行为。
21.在本发明的另一有利设计中,声学装置被设置为通过主动驱动致动器来发射即发出语音信号。换言之,声学装置被设计为通过使振动区域经历相应的声学振动来产生语音输出或输出语音,特别是输出到机动车辆的周围环境中。为此,声学装置例如可以包括相应设计的且与致动器连接的控制器。该控制器例如可以是或者包括所谓的数据处理装置或者它的一部分。相应地设置声学设备的事实在此例如可能意味着,它在其动态、其调制能力、其大小、其稳定性、其振动能力和/或类似事项方面被设计成产生语音信号。为此,例如可以将相应的振动区域设计为相应地薄、轻和/或局部地不同,以便能够在足够的频率范围内实现足够快的调制和声音生成。在此提出的声学装置的设计可以实现与机动车辆的周围环境或驻留在周围环境中的人进行特别有效和详细的通信。于是例如可以提高借助声学装置产生的声音信号的可理解性或正确解释。
22.在本发明的另一有利设计中,声学装置设置成基于车辆部件的借助致动器检测到的外部引起的运动来探测机动车辆与车辆外部障碍物的碰撞。车辆部件的外部引起的运动是车辆部件的运动或振动,该运动或振动不是由对致动器的主动控制引起的,即不是由通过致动器对车辆部件的主动控制引起的。在当前情况下,例如可以自动检测或确定车辆部件的运动幅度和/或运动速度。同样例如可以自动确定车辆部件的运动,即相应的振动或震动,是否仅由机动车辆的一个声学装置或者也由机动车辆的一个或多个其他声学装置检测到,运动持续多长时间,运动如何随着时间的推移而发展和/或类似的事项。基于此和/或例如通过与用于指示碰撞的运动的相应预定的标准或模式进行比较,然后可以自动确定或估计运动是否由碰撞引起。如果借助车辆部件的运动识别到碰撞,则可以例如由所述的控制器或所述的数据处理装置自动生成和输出相应的控制信号。由此例如可以自动停止机动车辆和/或防止机动车辆在障碍物方向上的进一步运动,这也可以提高在机动车辆运行时的安全性。
23.在本发明的另一有利设计中,声学装置被设置用以检测干扰噪声,即车辆部件的不希望的运动或震动,并通过相应地反相控制致动器来抵消它们。通过对致动器的这种控制,尤其可以减小相应的干扰噪声的幅度或车辆部件的相应震动的幅度。相应的干扰噪声
例如可以是周围环境噪声、行驶噪声或机动车辆的运行噪声。通过此处提出的对致动器或声学装置的控制,因此可以降低机动车辆的或在机动车辆的乘客舱中的音量水平和/或改变其频谱。结果,可以提高机动车辆的声学舒适度。此外,通过减小或抑制车辆部件的相应震动,可以避免或减少机动车辆的损坏或磨损,例如在车辆部件的保持点或连接点处。同样,通过检测车辆部件的震动,必要时可以探测机动车辆的损坏或磨损。如果是这种情况,则例如可以自动生成和输出相应的控制或信息信号,以便能够可靠地维护机动车辆。在此,对于相应的探测或诊断,检测到的震动例如也可以与预定的模式、信号或频谱进行比较,以便能够区分车辆部件的在车辆内部引起的震动和在车辆外部引起的即由车辆周围环境激发的震动。声学装置或多个相应的声学装置也可以特别有效且成本低廉地用于该功能,因为相应的声学装置可以布置在迄今为止通常未被其自身传感器监控的大量车辆部件上,并且由于它们的多功能性,它们是特别具有成本和资源效率的解决方案。
24.在本发明的另一有利设计中,声学装置被设置为根据机动车辆的当前行驶速度自动调整其用于自动检测尤其是外部感应的可听声音的灵敏度。灵敏度在较高速度时自动降低,在较低速度时自动增加。因此,在相应的低速下,例如低于50公里/小时或低于30公里/小时,可以使用声学装置的全部灵敏度,而在较高的速度下,例如高于50公里/小时或高于70km/h,实际上不可避免的噪音或震动可以通过相应降低的灵敏度过滤掉。这例如可能是车辆部件的由相对风引起的不携带任何信息内容的噪音或震动。通过这种方式,可以优化声学装置的效率,并且可以简化信号处理。为了调整灵敏度,可以指定一个或多个速度阈值和/或调整规则。后者可以例如规定或指定灵敏度的连续的或准连续的与速度相关的适配。这有利地使声学装置能够根据应用情况或周围环境按照需要进行调整。
25.同样,例如可以规定与位置相关的灵敏度调整。为此目的,可以指定一个或多个位置或位置类型,在这些位置处灵敏度降低或应该降低。例如,当在高速公路或乡村道路上行驶时,特别是在高于预定速度阈值的速度下,在洗车场等中,可以自动降低灵敏度。结果,可以避免最终不必要地检测车辆部件的振荡或震动。
26.本发明的其他特征可以从权利要求、附图和附图描述中得出。上面在说明书中提到的特征和特征组合以及下面在附图说明中和/或单独在附图中示出的特征和特征组合,不仅可以在分别给出的组合中使用,而且可以以其他组合使用或单独使用,而不偏离本发明的范围。
附图说明
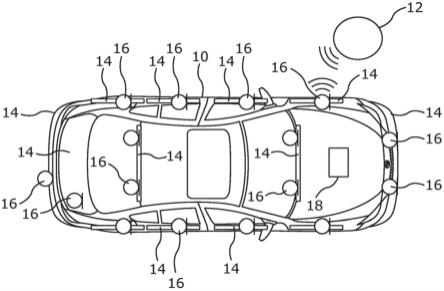
27.图1示出了具有声学元件和车辆外部障碍物的机动车辆的示意性俯视图;
28.图2示出了具有两个声学元件的车辆部件的示意性剖切俯视图;和
29.图3示出了该车辆部件的示意性剖切侧视图;
30.在这些附图中,相同的和功能相同的元件具有相同的附图标记。
具体实施方式
31.特别是在自动驾驶领域,目前人们对也通过音频信号即在可听的声音范围内检测环境(即相应的车辆周围环境)的兴趣越来越大,例如以便尽可能早地识别或辨别隐藏的危险源。在车辆外部使用经典麦克风很快就达到了其极限,因为这种麦克风例如容易受到风
噪声的影响,例如,来自与安全相关的声源的声音会在风噪声中丢失,因此无法可靠地探测到。
32.机动车辆与环境或周围环境之间的通信也变得越来越重要,尤其是在自动的或自动化的驾驶的领域中。在此有利的可能性尤其在于车辆与环境之间的音频通信,即在可听声音的频率范围内。
33.图1为此示出了相应装备的机动车辆10以及车辆外部的障碍物12的示意性概视图。该障碍物12例如可以是另一个道路使用者。为了与环境进行基于可听声音的通信,即为了产生和检测可听声音,机动车辆10在当前情况下具有声学装置。为此目的,在大量车辆部件14上形成相应的声学元件16,这些声学元件例如通过机动车辆10的此处未详细示出的车载网络与中央控制器18连接。车辆部件14例如可以是车身的塑料部件、前裙板或后裙板、车身附加部件、后扰流板、后视镜襟翼、捕叶器等。车辆部件14可由各种材料形成,例如塑料、金属、合金、复合或粘合材料、玻璃等。
34.与相应车辆部件14的相应相邻区域相比,车辆部件14在声学元件16的区域中进行了修改,以便在可听声音的频率范围内实现对激励的更大灵敏度。声学元件16布置在这些区域中,并且可以例如包括相应的传感器-致动器,这里简称为致动器22(参见图2)。车辆部件14或相应修改的区域因此可以被激发以产生可听见的声音振动,并且可以通过传感器-致动器检测、即探测相应的振动或震动。
35.声学元件16和控制器18在此连接成传感器或声学网络,由此产生或提供多种有利的评估或信号处理选项。
36.在当前情况下,利用在此包括声学元件16、车辆部件14的至少一部分和控制器18的声学装置,例如车辆外部的障碍物12可以借助由它发射的并利用声学元件16检测到的声波予以探测。同样,利用一个或多个声学元件16,可以通过相应地激励相应车辆部件14的至少一部分将声音信号输出到周围环境中,尤其是输出到障碍物12。例如,在人行横道区域中,障碍物12可以是行人。行人于是例如可以向机动车辆10指示他想要穿过人行横道,其方式例如为,他说:“停!我想过马路。”机动车辆10可以检测到这一点,并通过声学装置对其做出反应,例如通过输出确认的语音输出,比如“我注意到你并且将停止直到你通过”。
37.图2示出了具有例如两个声学元件16的车辆部件14之一的示意性俯视图。在当前情况下,此处所示的车辆部件14例如可以是机动车辆10的车顶扰流板。声学元件16在此分别包括振动区域20,该振动区域20与车辆部件14的其余部分或相邻区域28相比在其振动行为方面有所改变。在这些振动区域20的中央,在此分别布置了用于激发和检测相应的振动区域20的振动的致动器22。
38.在这里示例性地示出的设计中,两个声学元件16之一的振动区域20被划分为多个部分区域24,这些部分区域24具有不同的大小,并且因此具有不同的谐振频率。部分区域24在此由沿径向方向延伸的结构元件26彼此界定。
39.图3示出了图2中的车辆部件14的示意性剖切的侧视图,这里以机动车辆10的车顶扰流板为例。在这里可以看出,声学元件16,特别是致动器22,布置在车辆部件14的内侧,因此被车辆部件14覆盖和保护。
40.声学元件16因此直接连接到机动车辆10的车辆结构或并入其中,并且被设计用于优化或专门调整相应的振动行为,同时考虑到相应的材料结构和材料特性。
41.使用车辆部件14或在车辆部件14中形成的振动区域20,即最终已经存在于机动车辆10上的车身或附加部件,来产生和检测声音的优点是,这些区域或部件与传统的基于膜片的麦克风相比,明显不易受干扰。这样可以减少故障并相应减少维护工作,从而提高可靠性并最终提高安全性。此外,与传统的膜片式麦克风相比,可以实现其他功能,例如检测车辆内部的、例如通过结构噪声传输到相应车辆部件14上的振动。同样地,例如,碰撞或停车颠簸等可以通过声学装置予以探测,并且可以通知给机动车辆10的相应用户或操作者。同样,这里介绍的声学装置也可以在机动车辆10的行驶期间既用于自我保护,又用于保护环境或其他道路使用者,例如通过对其他道路使用者的相应的声音警告予以保护。
42.原则上,可听声音的产生和检测已经可以通过单个声学元件16来实现。然而,使用多个声学元件16,特别是在复合材料或网络中,是有利的。以此方式,可以特别准确和可靠地对不同的方向发出声音,并且可以从不同的方向,特别是对于所有水平方向,即在机动车辆10的x-y平面中的360
°
角范围或周边内,检测可听见的声音。例如,可以通过将声学元件16或由这些声学元件检测到的声音信号彼此互相关,和/或通过形成对应的检测到的声音信号或测量值的比率,来计算周围环境的声学图像。在这个意义上,声学元件16的网络可以清楚地起到一种声学照相机的作用。特别是在城市环境中,可听见的声音范围,即从大约10hz到大约20khz的声学范围,可能特别重要,并提供特别有价值的信息。
43.将声学装置特别是声学元件16智能地放置、集成到车辆部件14上和适配于它是特别有利的,特别是对车辆部件14进行相应的修改或调整,同时考虑到与在较高可听声音范围内的振动激励有关的相应材料特性。
44.例如针对最大化的灵敏度、根据需要调整的频率响应、激励效率、相应车辆部件14的稳定性或刚度等,例如通过相应的建模或模拟,可以预先优化对声学元件16或振动区域20的最佳定位或布置和/或相应的设计。
45.这里描述的声学装置提供了许多优点和有利的应用选项。例如,通过声学装置,在所谓的按需移动过程中,或者在使用自动或自主的出租车等时,相应的客户可以将声学装置用作人机界面,以与机动车辆10进行通信。同样,其他人员,例如警察等,可以通过声学装置与可能无人驾驶的机动车辆10进行通信。如果机动车辆10由遥控操作员远程控制,则机动车辆10的周围环境可以通过声学装置使遥控操作员听到,这使得遥控操作员能够更好地评估相应的情况。此外,遥控操作员可以通过声学装置主动地与周围环境进行通信。
46.同样,通过声学装置,借助探测到的车辆部件14的振动行为随时间的变化,例如可以识别材料疲劳或损坏,或者可以预测故障,例如借助相应车辆部件14的谐振频率或基本振动的特定模式或特定变化。如果声学元件16中的至少一个被布置在机动车辆10的支撑结构上,则这样做尤其有利。借助相应的数据,机动车辆10或车辆部件14的故障或完全失效可以及时被识别到,并且通过相应的维护措施来防止。
47.同样,可以利用声学装置来检测干扰噪声,干扰噪声例如在行驶时由机动车辆10的车身部分、由机动车辆10的振动、相对风和/或其他组件产生。借助声学装置或致动器22,于是可以产生相对于相应的干扰噪声相移的或负的振动并且将其叠加在干扰噪声上以抵消干扰噪声。
48.声学装置也可以用于产生发动机更换噪音,特别是在电动车辆中,而为此不需要例如额外的扬声器或声音模块等。在这种情况下,例如,可以根据机动车辆10的状态或计划
行为产生不同的发动机更换噪声。例如,在机动车辆10的自主滑行操作中,通过由声学装置产生的相应不同的噪声,可通知或由其他人检测机动车辆10当前是空闲的还是被占用的,是接近还是远离相应的人,和/或类似的。
49.总体而言,所描述的示例表明了如何通过在车辆的车身和结构部件上智能地应用2路振动拾音器来实现在车辆环境中的声学通信以及与车辆环境的声学通信。
50.附图标记清单
51.10机动车辆
52.12障碍物
53.14汽车部件
54.16声学元件
55.18控制器
56.20振动范围
57.22致动器
58.24部分区域
59.26结构元件
60.28相邻区域。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1