一种基于CS-MUSIC矿井提升机故障源定位分析方法
一种基于cs-music矿井提升机故障源定位分析方法
技术领域
1.本发明涉及音频信号分析及定位领域,具体是一种基于cs-music矿井提升机故障源定位分析方法。
背景技术:
2.矿井提升机在矿井的运输工程中承担着极其重要的作用,提升机的安全和稳定的性能影响着井下工作人员的安全以及煤矿的经济效益。目前,矿井提升机监控设备不完善,发生故障时维修人员很难即时排查出故障源头,大大影响了矿井工作的效率。当矿井提升机发生故障时,其声音也会随着提升机的状态发生改变,因此通过分析提升机发出的音频特征来检测设备是否出现故障。而现有的基于声音检测矿井提升机故障主要侧重于预测识别故障类型,这种方式的缺点是发生故障时要进一步寻找故障的源头,浪费大量人力物力。
3.为此,本发明提出了一种基于cs-music矿井提升机故障源定位分析方法解决上述问题。
4.梅尔频率倒谱系数(mel-frequency cepstral coefficient,mfcc)是声音信号频域分析方法的一种,不限制其输入的音频信号类型,具有更好的鲁邦性,抗干扰性强。music算法(multiple signal classification)是一种只要已知天线阵的布阵形式,不管阵元是否是等间距分布,构建谱函数求得波峰估计值,就会得到高分辨率的定位结果的算法发。布谷鸟算法(cuckoo search,cs)通过模拟布谷鸟的寄生育雏的方式,解决最优解相关的问题,具有强大的搜寻能力,需要的参数少等优点。
技术实现要素:
5.本发明的目的是提出一种基于cs-music矿井提升机故障源定位分析方法,对矿井提升机的音频信号进行实时监测和识别,通过对音频信号的预处理,梅尔频率倒谱系数提取以及故障识别和故障定位,实现对矿井提升机的监测故障诊断和故障定位等功能,可快速有效的定位矿井提升机故障发生的具体位置,从而保证提升机的安全稳定的运行。
6.本发明为实现发明目的采用如下技术方案:
7.一种基于cs-music矿井提升机故障源定位分析方法,包括以下步骤:
8.步骤1、利用五元十字形麦克风阵列采集并存储矿井提升机完整运行过程的音频信号,对采集到的音频信号进行预处理,其中:包含预加重、分帧和加窗;
9.步骤2、对预处理后的音频信号进行mfcc特征参数提取,包括:fft变换、mel滤波器滤波和取对数dct;
10.步骤3、对识别出故障的音频用music算法进行声音定位;
11.步骤4、用cs算法优化步骤3得到的定位分布峰值结果;
12.进一步的,步骤1中的预加重、分帧和加窗具体包括:
13.步骤1-1、预加重:通过一阶fir高通滤波器以此来增强矿井提升机音频信号的高频部分,以此来减小噪声对音频信号的影响。结果为:
14.z'(t)=z(t)-hz(t-1)
ꢀꢀꢀꢀꢀ
(1)
15.其中:z(t)表示第t个采样点出的音频信号,h为为加强系数,h=0.97;
16.步骤1-2、分帧加窗:先对z'(t)先进行分帧,以256点为一帧,步长为512,对音频信号每一帧采用汉明加窗,变为更平滑的z(m);
17.进一步的,步骤2中的短时傅里叶变换、mel滤波器滤波和离散余弦变换具体包括:
18.步骤2-1、fft。对每帧提升机音频信号z(m)进行快速傅立叶变换,时域音频信号zi(m)变为频域音频信号z(i,j)即:
19.z(i,j)=fft[zi(m)]
ꢀꢀꢀꢀꢀ
(2)
[0020]
步骤2-2、mel滤波器滤波。设计mel滤波器为24阶让每一个都转换为mel刻度下的值,其频率公式表达为:
[0021]
e(i,j)=[z(i,j)]2ꢀꢀꢀꢀꢀꢀ
(3)
[0022]fmel
=2595lg(1+f/700)
ꢀꢀꢀꢀꢀꢀ
(4)
[0023]
其中:i为第i帧;j为频域中的第j条谱线,e(i,j)代表每一帧的能量。f
mel
为感知频率,f际频率。
[0024]
步骤2-3、取对数dct。对经过转换后能量值进行对数变换,再进行dct变换,得到mfcc参数。具体为:
[0025][0026]
其中:0≤m<m,hm(h)为滤波器的频率响应,m代表第m个滤波器。
[0027]
进一步的步骤3中识别出故障的音频用music算法进行声音定位具体为:
[0028]
步骤3-1、、将采集的五路声音信号进行二次分帧,长度为l,步长为分帧长度的一半,然后对分帧后的信号做fft变换。公式如下:
[0029][0030]
其中:k=0,1,
…
l-1,
[0031]
可以得到音频信号频域模型为:
[0032]
z(fi)=a
θ
(fi)s(fi)+n(fi)
ꢀꢀꢀꢀꢀꢀ
(7)
[0033]
其中:为方向响应向量,τ
p
(θ)(p=1,2,3,4)是信号之间的时延z,s为提升机发出的声音信号,n为阵列噪声。i=1,2,3
…
j,fs为信号频率。
[0034]
步骤3-2、求协方差矩阵的估计值。
[0035]
[0036]
其中:n为采样个数。
[0037]
步骤3-3、对r
x
进行特征分解得:
[0038][0039]us
为信号子空间,其特征值大于噪声功率。un为噪声子空间,其特征值等于噪声功率。
[0040]
从而得到music的谱估计函数为:
[0041][0042]
其中:为观察页面。
[0043]
通过θ在观察扇面内进行扫描,从而得出式在各扫描方位对应的数值,当该函数出现峰值的方位,记作γ,即为提升机故障信号方位。
[0044]
进一步的步骤4中用cs算法优化步骤3得到的定位分布峰值结果具体为:
[0045]
步骤4-1、初始化参数:设置迭代次数m,巢穴数量n,目标参数即提升机故障信号的方位γ,并在搜索可行范围内随机初始化巢穴位置,方位γ,并在搜索可行范围内随机初始化巢穴位置,表示第i个巢穴的第m次迭代的巢穴位置;
[0046]
步骤4-2、计算每个巢穴的适应度值保存当前迭代即0迭代适应度值最小的巢穴的位置;
[0047]
所述适应度值计算公式为:表示第i个巢穴的第t迭代的适应度值,i=1,
…
,n,ki表示故障点计算坐标位置,为故障点实际坐标位置,n为训练集个数;
[0048]
步骤4-3、第一次更新巢穴位置计算各个的适应度值并与对应的上一迭代巢穴的适应度值对比,保存适应度值小的巢穴位置至下一迭代,即若则新巢穴否则新巢穴
[0049]
第一次更新巢穴位置公式为:
[0050][0051]
其中:α为步长控制因子,为点乘,levy(β)为levy随机搜索方式
[0052]
步骤4-4、判断步骤4-3所述新巢穴是否为“劣质”巢穴,如果不是,则新巢穴如果是,则第二次更新巢穴位置得到新巢穴
[0053][0054]
其中:是随机选择的两个不同巢穴,s是步长。
[0055]
步骤4-5、计算步骤4-4所述新巢穴的适应度值,并将其与对应的更新前的巢穴的适应度值进行对比,保存适应度值小的巢穴位置,即若则新巢穴否则新巢穴并保存当前迭代适应度值最小的巢穴的位置;
[0056]
步骤4-6、判断是否当前迭代t≥最大迭代次数t,若否,则返回到步骤4-3,若是,则输出适应度值最小的巢穴位置,即为目标参数γ的最优解。
[0057]
优选的步骤4-4中所述“劣质”巢穴通过如下方法判断:若当前适应度值则当前巢穴不属于“劣质”巢穴;若当前适应度值则当前巢穴为“劣质”巢穴,其中:巢穴,其中:分别为当前迭代适应度最大值和最小值,即为当前迭代适应度最大值和最小值的四分之三中位数。
[0058]
本发明现有技术相比,其有益效果体现在:
[0059]
1.通过应用提升机运行时的声学信号的对提升机的故障进行分析,声音采集设备成本较低、操作简单且实时性高。
[0060]
2.通过mfcc特征提取音频信号的信息,该算法抗干扰性能强,具有更好的鲁棒性。
[0061]
3.通过应用cs算法对music定位结果寻优,大大提高了定位结果的精准性和准确性。
附图说明
[0062]
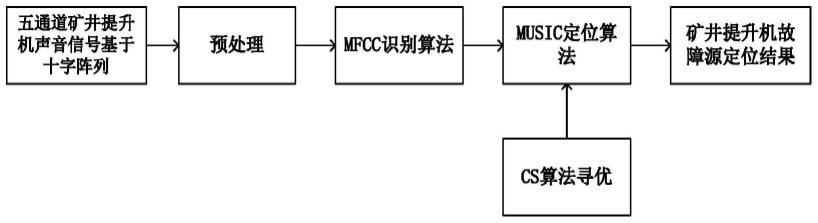
图1为本发明的一种基于cs-music矿井提升机故障源定位分析方法的流程示意图。
[0063]
图2为本发明中音频信号的原始信号波形图。
[0064]
图3为本发明中音频信号预处理后的示意图。
[0065]
图4为本发明中music定位部分算法流程图。
[0066]
图5为本发明中五元十字形阵列建立在直角坐标系下的结构图。
具体实施方式
[0067]
以下通过具体实施例来对本发明做进一步解释说明。
[0068]
如图1所示,本发明的一种基于cs-music矿井提升机故障源定位分析方法,具体包括如下步骤:
[0069]
步骤1、利用五元十字形麦克风阵列采集并存储矿井提升机完整运行过程的音频信号,对采集到的原始音频信号z(t)如图2所示进行预处理,其中:包含预加重、分帧和加窗,预处理后的图像如图3所示。
[0070]
步骤1-1、预加重:通过一阶fir高通滤波器以此来增强矿井提升机音频信号的高频部分,以此来减小噪声对音频信号的影响。结果为:
[0071]
z'(t)=z(t)-hz(t-1)
ꢀꢀꢀꢀꢀꢀ
(1)
[0072]
其中:z(t)表示第t个采样点出的音频信号,h为为加强系数,h=0.97;
[0073]
步骤1-2、分帧加窗:先对z'(t)先进行分帧,以256点为一帧,步长为512,对音频信号每一帧采用汉明加窗,变为更平滑的z(m)
[0074]
步骤2、对预处理后的音频信号进行mfcc特征参数提取,包括:fft变换、mel滤波器滤波和取对数dct;
[0075]
步骤2-1、fft。对每帧提升机音频信号z(m)进行快速傅立叶变换,时域音频信号zi(m)变为频域音频信号z(i,j)即:
[0076]
z(i,j)=fft[zi(m)]
ꢀꢀꢀꢀꢀ
(2)
[0077]
步骤2-2、mel滤波器滤波。设计mel滤波器为24阶让每一个都转换为mel刻度下的值,其频率公式表达为:
[0078]
e(i,j)=[z(i,j)]2ꢀꢀꢀꢀꢀꢀ
(3)
[0079]fmel
=2595lg(1+f/700)
ꢀꢀꢀꢀꢀꢀ
(4)
[0080]
其中,i为第i帧;j为频域中的第j条谱线,e(i,j)代表每一帧的能量。f
mel
为感知频率,f际频率。
[0081]
步骤2-3、取对数dct。对经过转换后能量值进行对数变换,再进行dct变换,得到mfcc参数。具体为:
[0082][0083]
其中:0≤m<m,hm(h)为滤波器的频率响应,m代表第m个滤波器。
[0084]
步骤3、对识别出故障的音频用music算法进行声音定位部分流程如图4所示。
[0085]
步骤3-1、将采集的五路声音信号进行二次分帧,长度为l,步长为分帧长度的一半,然后对分帧后的信号做fft变换。公式如下:
[0086][0087]
其中:k=0,1,
…
l-1,
[0088]
可以得到音频信号频域模型为:
[0089]
z(fi)=a
θ
(fi)s(fi)+n(fi)
ꢀꢀꢀꢀꢀꢀ
(7)
[0090]
其中:为方向响应向量,τp(θ)(p=1,2,3,4)是信号之间的时延z,s为提升机发出的声音信号,n为阵列噪声。i=1,2,3
…
j,fs为信号频率。
[0091]
步骤3-2、求协方差矩阵的估计值。
[0092][0093]
其中:n为采样个数。
[0094]
步骤3-3、对r
x
进行特征分解得:
[0095][0096]us
为信号子空间,其特征值大于噪声功率。un为噪声子空间,其特征值等于噪声功率。
[0097]
从而得到music的谱估计函数为:
[0098][0099]
其中:为观察页面。
[0100]
通过θ在观察扇面内进行扫描,从而得出式在各扫描方位对应的数值,当该函数出现峰值的方位,记作γ,即为提升机故障信号方位。
[0101]
步骤4中用cs算法优化步骤3得到的定位分布峰值结果。
[0102]
步骤4-1、初始化参数:设置迭代次数m,巢穴数量n,目标参数即提升机故障信号的方位γ,并在搜索可行范围内随机初始化巢穴位置,方位γ,并在搜索可行范围内随机初始化巢穴位置,表示第i个巢穴的第m次迭代的巢穴位置;
[0103]
步骤4-2、计算每个巢穴的适应度值保存当前迭代即0迭代适应度值最小的巢穴的位置;
[0104]
所述适应度值计算公式为:表示第i个巢穴的第t迭代的适应度值,i=1,
…
,n,ki表示故障点计算坐标位置,为故障点实际坐标位置,n为训练集个数;
[0105]
步骤4-3、第一次更新巢穴位置计算各个的适应度值并与对应的上一迭代巢穴的适应度值对比,保存适应度值小的巢穴位置至下一迭代,即若则新巢穴否则新巢穴
[0106]
第一次更新巢穴位置公式为:
[0107][0108]
其中:α为步长控制因子,为点乘,levy(β)为levy随机搜索方式
[0109]
步骤4-4、判断步骤4-3所述新巢穴是否为“劣质”巢穴,如果不是,则新巢穴如果是,则第二次更新巢穴位置得到新巢穴
[0110][0111]
其中:是随机选择的两个不同巢穴,s是步长。
[0112]
步骤4-5、计算步骤4-4所述新巢穴的适应度值,并将其与对应的更新前的巢穴的适应度值进行对比,保存适应度值小的巢穴位置,即若则新巢穴否则新巢穴并保存当前迭代适应度值最小的巢穴的位置;
[0113]
步骤4-6、判断是否当前迭代t≥最大迭代次数t,若否,则返回到步骤4-3,若是,则输出适应度值最小的巢穴位置,即为目标参数γ的最优解。
[0114]
优选的步骤4-4中所述“劣质”巢穴通过如下方法判断:若当前适应度值则当前巢穴不属于“劣质”巢穴;若当前适应度值则当前巢穴为“劣质”巢穴,其中:巢穴,其中:分别为当前迭代适应度最大值和最小值,即为当前迭代适应度最大值和最小值的四分之三中位数。
[0115]
需要说明的是,以上公开的仅为本发明的具体实例,根据本发明提供的思想,本领域的技术人员能思及的变化,都应落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1