一种基于多通道FXAP的智能整车降噪系统的制作方法
一种基于多通道fxap的智能整车降噪系统
技术领域
1.本发明涉及汽车主动降噪领域,更具体的说,它涉及一种基于多通道fxap的智能整车降噪系统。
背景技术:
2.随着汽车的不断普及,人们越来越重视汽车内的舒适环境,于是汽车的主动降噪也不断受到重视,相比于使用隔音材料的被动降噪,通过发出反相声波与噪声声波进行叠加抵消的主动降噪方法显然更加具有优势,其可以根据不同源的噪声,根据噪声信号的不同,进行实时调整,降噪效果好。
3.主动降噪一般步骤为采集噪声信号,使得噪声信号通过自适应滤波器,生成反相噪声信号,并通过扬声器进行输出,和目标噪声信号进行叠加抵消,并通过误差传感器采集叠加之后的噪声,作为误差输入自适应滤波器,对自适应滤波器进行系数更新,实现降噪的效果。目前主动降噪(anc)的算法主要有lms、fxlms和fxnlms等,其中fxlms由于在对滤波器进行系数更新时,考虑了扬声器到误差传感器的距离和时延,而被广泛使用,但是fxlms在实际使用过程中,由于噪声变化大,收敛速度较慢。
4.声波在叠加抵消时,两个声波的方向是否正对也是一个降噪效果较为重要的影响因素,但是目前的降噪系统较少对此方面进行说明,未考虑扬声器转动对主动降噪的优化。
5.现提供一种基于多通道fxap的智能整车降噪系统,用于解决现有的主动降噪算法收敛较慢,扬声器无法转动的问题。
技术实现要素:
6.为了克服现有的主动降噪算法收敛较慢,扬声器无法转动的缺点,本发明提供一种收敛速度快,能够自动控制扬声器转动的智能整车降噪系统。
7.为解决上述技术问题,一种基于多通道fxap的智能整车降噪系统,包括:
8.噪声采集模块,用于采集噪声源处的初级噪声信号;
9.滤波器,用于处理噪声信号,生成反相噪声信号;
10.次级通道滤波器,用于模拟次级通道传递函数;
11.滤波器更新模块,用于更新滤波器内的系数;
12.反相噪声输出模块,用于根据反相噪声信号输出反相噪声;
13.第一误差信号采集模块,用于采集目标噪声与反相噪声叠加抵消后的噪声信号,并作为第一误差信号e1(n)送入滤波器更新模块。
14.具体地,所述噪声采集模块配置为麦克风阵列,设置在汽车周边。
15.具体地,所述反相噪声输出模块配置包括但不限于扬声器。
16.具体地,所述滤波器更新模块内部存储fxap算法,更新滤波器内的系数具体实现方法包括如下步骤:
17.s1:获取经过次级通道滤波器的模拟噪声信号xi(n)和第一误差信号e1(n);
18.s2:以经过次级通道滤波器的模拟噪声信号xi(n)和第一误差信号e1(n)作为输入,通过fxap算法对滤波器内部系数进行迭代更新。
19.具体地,还包括:
20.控制模块,用于控制反相噪声输出模块旋转;
21.第二误差信号采集模块,设置在汽车中心位置,用于采集车内噪音信号,并作为第二误差信号e2(n)送入控制模块。
22.具体地,所述控制模块包括:
23.误差信号接收单元,用于接收第二误差信号e2(n);
24.旋转控制单元,用于控制反相噪声输出模块旋转;
25.旋转角度处理单元,用于计算并储存反相噪声输出模块旋转的角度αn;
26.控制反相噪声输出模块旋转的步骤包括:
27.t1:设置“k=1”,根据时间刻度t,获取第二误差信号e2(n),并控制反相噪声输出模块旋转αn,再次获取第二误差信号e2(n+1);
28.t2:判断若条件成立,控制模块停止控制反相噪声输出模块旋转,若条件不成立,判断“a2(n)》a2(n+1)”,若条件“a2(n)》a2(n+1)”成立,进入t3;若条件“a2(n)》a2(n+1)”不成立,将a2(n)记为m,进入t4;其中a2(n)为第二误差信号e2(n)对应的平均振幅,a2(n+1)为第二误差信号e2(n+1)对应的平均振幅;
29.t3:令“n=n+1”,控制反相噪声输出模块旋转αn,再次获取第二误差信号e2(n+1),回到t2;
30.t4:令“n=n+1”,控制反相噪声输出模块反向旋转获取第二误差信号e2(n+1),判断若条件成立,控制模块停止控制反相噪声输出模块旋转,若条件不成立,判断“m》a2(n+1)”,其中a2(n+1)为第二误差信号e2(n+1)对应的平均振幅,若条件“m》a2(n+1)”成立,令“k=k+1”,进入t5;若条件“m》a2(n+1)”不成立,进入t4;
31.t5:令“n=n+1”,并控制反相噪声输出模块旋转获取第二误差信号e2(n+1),判断若若条件成立,控制模块停止控制反相噪声输出模块旋转,若条件不成立,判断“a2(n)》a2(n+1)”,若“a2(n)》a2(n+1)”成立,重复t5;若“a2(n)》a2(n+1)”不成立,将a2(n)记为m,进入t4。
32.具体地,所述第一误差信号采集模块和第二误差信号采集模块配置为拾音器或者麦克风。
33.具体地,所述旋转角度处理单元储存有所述实现控制反相噪声输出模块旋转的指
令。
34.本发明具有以下优点:
35.1、本发明通过采用fxap算法对主动降噪的滤波器进行系数更新,由于对滤波-x矩阵进行特征值散度聚集,加快了收敛速度;
36.2、本发明通过控制反相噪声输出模块根据第二误差信号不断适应性旋转,实现了反相噪声输出模块正对噪声源,强化了主动降噪效果。
附图说明
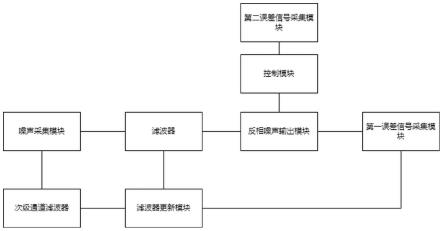
37.图1为本发明实施例所应用的基于多通道fxap的智能整车降噪系统的结构示意图。
38.图2为本发明所采用的控制模块的结构示意图。
39.图3为本发明所采用的主动降噪实现步骤的流程图。
40.图4为本发明所采用的控制反相噪声输出模块旋转的流程图。
具体实施方式:
41.为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
42.实施例1
43.一种基于多通道fxap的智能整车降噪系统,如图1所示,包括噪声采集模块、滤波器、次级通道滤波器、滤波器更新模块、反相噪声输出模块和第一误差信号采集模块:
44.噪声采集模块,配置为麦克风阵列,设置在汽车周边;用于采集噪声源处的初级噪声信号,记为xi(n),xi(n)=[xi(n),xi(n-1),
…
,xi(n-l+1)]
t
;
[0045]
其中l为滤波器的阶数,i为噪声信号个数;
[0046]
滤波器,用于处理噪声信号,生成反相噪声信号,记为yj(n);
[0047]
次级通道滤波器,内部系数为用于模拟次级通道传递函数s
i,k
;
[0048][0049]sj,k
=[s
j,k
(0),s
j,k
(1),
…
,s
j,k
(m-1)]
t
;
[0050]
其中m为次级通道传递函数的长度,j为反相噪声输出个数,k为第一误差信号个数;
[0051]
滤波器更新模块,用于更新滤波器内的系数w(n);
[0052]wj,k
(n)=[w0(n),w1(n)
…wl-1
(n)]
t
[0053]
w(n)=[w
t1,1
(n),w
t1,2
(n),
…
,w
ti,j
(n)]
t
[0054]
具体地,滤波器对噪声信号的处理是通过滤波器内部系数w(n)与噪声信号进行卷积计算:
[0055][0056]
反相噪声输出模块,配置为扬声器,用于根据反相噪声信号输出反相噪声;
[0057]
第一误差信号采集模块,配置为拾音器,用于采集目标噪声d(n)与反相噪声叠加抵消后的噪声信号,并作为第一误差信号e1(n)送入滤波器更新模块。
[0058]
具体地,所述滤波器更新模块内部存储fxap算法,更新滤波器内的系数具体实现方法包括如下步骤:
[0059]
s1:获取经过次级通道滤波器的模拟噪声信号xi(n)和第一误差信号e1(n);
[0060]
s2:以经过次级通道滤波器的模拟噪声信号xi(n)和第一误差信号ek(n)作为输入,通过fxap算法对滤波器内部系数w(n)进行迭代更新,迭代公式如下:
[0061]ui,j,k
=x
ti
(n)*s
j,k
[0062]ui,j,k
即为滤波-x矩阵;
[0063]
uk(n)=[u
t1,2,k
,u
t1,2,k
,
…
,u
t1,2,k
]
t
[0064][0065]
u(n)=[u1(n),u2(n),
…
,uk(n)]
[0066]
w(n+1)=w(n)+μu(n)
·
[u
t
(n)u(n)+δi]-1
e1(n)
[0067]
其中μ为步长因子,δ为一小量,用于避免运算错误;
[0068]
本实施例所采用的一种基于多通道fxap的智能整车降噪系统,如图3所示,其主动降噪实现步骤如下:
[0069]
b1:噪声采集模块采集噪声源处的初级噪声信号分别输入滤波器和次级通道滤波器,初级噪声信号通过次级通道滤波器进行卷积计算,用于模拟反相噪声信号经过次级通道的损失,得到滤波-x矩阵并送入滤波器更新模块;
[0070]
b2:滤波器对噪声信号进行卷积计算,生成反相噪声信号,并送入反相噪声输出模块;
[0071]
b3:反相噪声输出模块根据反相噪声信号生成反相噪声并进行输出,和目标噪声进行叠加抵消;
[0072]
b4:第一误差信号采集模块采集目标噪声与反相噪声叠加抵消后的噪声信号,作为第一误差信号并送入滤波器更新模块;
[0073]
b5:滤波器更新模块根据第一误差信号和滤波-x矩阵对滤波器内部系数进行更新。
[0074]
本实施例通过采用fxap算法对主动降噪的滤波器进行系数更新,由于对滤波-x矩阵进行特征值散度聚集,加快了收敛速度。
[0075]
实施例2
[0076]
具体地,如图1所示,还包括:
[0077]
控制模块,用于控制反相噪声输出模块旋转,通过控制电机实现;
[0078]
第二误差信号采集模块,配置为麦克风,设置在汽车中心位置,用于采集车内噪音信号,并作为第二误差信号e2(n)送入控制模块。
[0079]
具体地,如图2所示,所述控制模块包括:
[0080]
误差信号接收单元,用于接收第二误差信号e2(n);
[0081]
旋转控制单元,用于控制反相噪声输出模块旋转;
[0082]
旋转角度处理单元,储存有所述实现控制反相噪声输出模块旋转的指令,用于计算并储存反相噪声输出模块旋转的角度αn;
[0083]
如图4所示,控制反相噪声输出模块旋转的步骤包括:
[0084]
t1:设置“k=1”,根据时间刻度t,第二误差信号采集模块获取第二误差信号e2(n),并通过旋转控制单元控制反相噪声输出模块旋转αn,第二误差信号采集模块再次获取第二误差信号e2(n+1),并将e2(n),αn,e2(n+1)存储在旋转角度处理单元中;
[0085]
t2:通过旋转角度处理单元判断若条件成立,控制模块停止控制反相噪声输出模块旋转,若条件不成立,通过旋转角度处理单元判断“a2(n)》a2(n+1)”,若条件“a2(n)》a2(n+1)”成立,进入t3;若条件“a2(n)》a2(n+1)”不成立,将a2(n)记为m,进入t4;其中a2(n)为第二误差信号e2(n)对应的平均振幅,a2(n+1)为第二误差信号e2(n+1)对应的平均振幅;
[0086]
t3:通过旋转角度处理单元令“n=n+1”,并通过旋转控制单元控制反相噪声输出模块旋转αn,第二误差信号采集模块再次获取第二误差信号e2(n+1),回到t2;
[0087]
t4:通过旋转角度处理单元令“n=n+1”,并通过旋转控制单元控制反相噪声输出模块反向旋转第二误差信号采集模块获取第二误差信号e2(n+1),判断若条件成立,控制模块停止控制反相噪声输出模块旋转,若条件不成立,判断“m》a2(n+1)”,其中a2(n+1)为第二误差信号e2(n+1)对应的平均振幅,若条件“m》a2(n+1)”成立,令“k=k+1”,进入t5;若条件“m》a2(n+1)”不成立,进入t4;
[0088]
t5:令“n=n+1”,并通过旋转控制单元控制反相噪声输出模块旋转第二误差信号采集模块获取第二误差信号e2(n+1),判断若条件成立,控制模块停止控制反相噪声输出模块旋转,若条件不成立,判断“a2(n)》a2(n+1)”,若“a2(n)》a2(n+1)”成立,重复t5;若“a2(n)》a2(n+1)”不成立,将a2(n)记为m,进入t4。
[0089]
本实施例通过控制反相噪声输出模块根据第二误差信号不断适应性旋转,实现了反相噪声输出模块正对噪声源,强化了主动降噪效果。
[0090]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下做出若干等同替代或明显变型,而且性能或用途相同,都应当视为属于本发明由所提交的权利要求书确定的专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1