一种逐次变分模态分解的声音增强方法和装置
本发明涉及声音识别,特别是涉及一种逐次变分模态分解的声音增强方法和装置。
背景技术:
1、在野外运动目标识别任务中,被动的声音探测方式具有以下诸多优点:不受视线影响,可以识别到丘陵等复杂地段的目标;探测范围较广;体积小,隐蔽性好,不易被发现;不易被电磁干扰或者被无线电定位;功耗低,可以全天候工作;技术成本低等。所以声音在野外目标识别任务中应用广泛且发挥着重大的作用。基于声音的野外目标识别一般有着信号增强、特征选取与提取和分类器设计等步骤。声音信号的采集容易受到风噪的干扰,且风噪和目标信号都处于低频段内,难以分辨,风噪的干扰会对特征提取阶段造成影响,使得难以获得具有良好可分性的特征,进而影响目标识别准确率。所以在声音识别任务中,使用效果良好、具有鲁棒性的声音增强方案是有必要的。
2、现有的声音增强方法主要有滤波器法、谱减法、小波阈值降噪法、经验模态分解法等,它们主要存在以下限制:
3、(1)在不同的、复杂的噪声干扰下,声音信号的增强效果不稳定,可能会过多地保留干扰信号或者削弱有效信号。
4、(2)滤波器法对声音信号有较高的要求,需要噪声和目标信号在频域内具有良好的可分类性,然而在野外环境中,风噪和目标信号通常都主要集中在低频段,滤波器法应用效果不佳。
5、(3)小波阈值降噪无法自适应分解信号,存在有效信号丢失的问题。
6、(4)经验模态分解法分解后的信号可能存在严重模态混叠、三次样条插值法带来的下冲或者过冲问题。
技术实现思路
1、本发明所要解决的技术问题是提供一种逐次变分模态分解的声音增强方法和装置,能够有效提升声音增强的效果,为后续识别准确率提供基础。
2、本发明解决其技术问题所采用的技术方案是:提供一种逐次变分模态分解的声音增强方法,包括以下步骤:
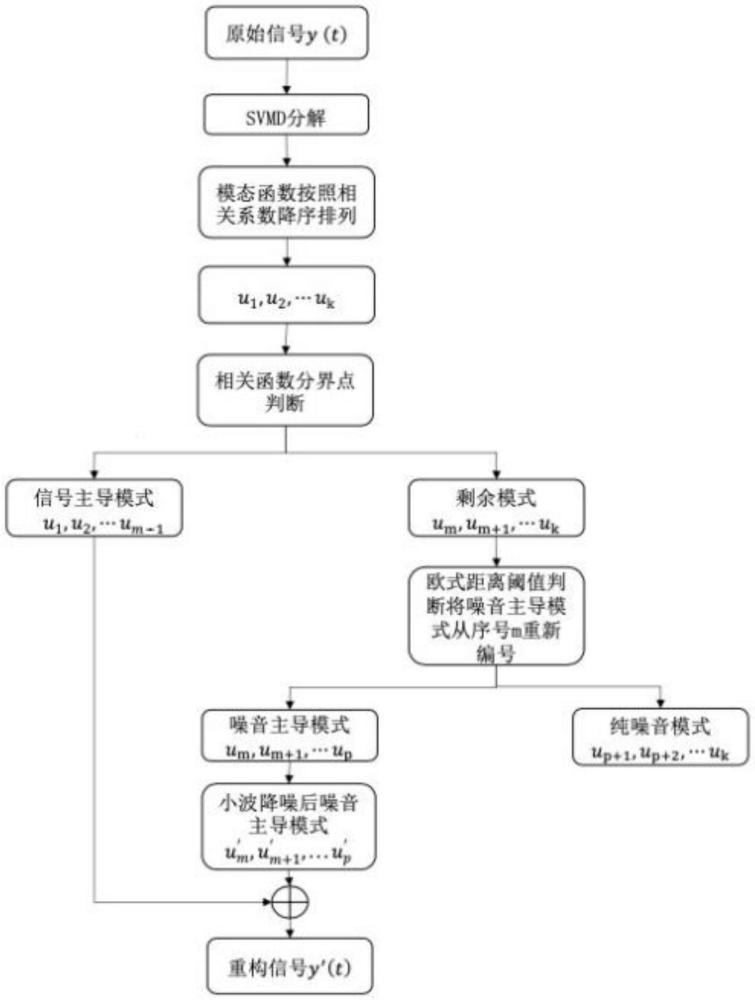
3、对接收到的声音信号进行逐次变分模态分解,得到若干本征模态函数;
4、引入相关系数和欧几里德距离来确定模态的分界点,将所述若干本征模态函数分为信号主导模式、噪声主导模式和纯噪音模式;
5、保留所述信号主导模式,对所述噪声主导模式进行降噪,丢弃所述纯噪音模式,并基于降噪后的噪声主导模式与所述信号主导模式进行相加重构,得到声音增强信号。
6、所述引入相关系数和欧几里德距离来确定模态的分界点,将所述若干本征模态函数分为信号主导模式、噪声主导模式和纯噪音模式,具体包括:
7、计算各个本征模态函数与所述声音信号之间的相关系数,并按照相关系数从大到小进行排序;
8、计算相邻的本征模态函数的相关系数的差的比值来确定分界点,并根据所述分界点确定本征模态函数为信号主导模式还是剩余模式;所述剩余模式为所述噪声主导模式与纯噪音模式之和;
9、计算所述剩余模式中每个本征模态函数与所述声音信号的欧几里德距离,并根据欧几里德距离来确定剩余模式中的本征模态函数为所述纯噪音模式还是所述噪声主导模式。
10、所述分界点的确定依据为:当第m+1个本征模态函数的相关系数与第m个本征模态函数的相关系数之差的绝对值小于第m个本征模态函数的相关系数与第m-1个本征模态函数的相关系数之差的绝对值,且第m个本征模态函数的相关系数与第m-1个本征模态函数的相关系数之差的绝对值大于第m-2个本征模态函数的相关系数与第m-1个本征模态函数的相关系数之差的绝对值时,将第m个本征模态函数作为分界点,在所述第m个本征模态函数之前的所有本征模态函数均为信号主导模式。
11、当所述分界点无法确定时,将所述若干本征模态函数全部归于所述剩余模式。
12、所述根据欧几里德距离来确定所述纯噪音模式,具体为:当所述剩余模式中的第j个本征模态函数与所述声音信号的欧几里得距离大于β倍的所述剩余模式中本征模态函数与所述声音信号的欧几里得距离的平均值时,则将第j个本征模态函数确定为纯噪音模式;当所述剩余模式中的第j个本征模态函数与所述声音信号的欧几里得距离小于或等于β倍的所述剩余模式中本征模态函数与所述声音信号的欧几里得距离的平均值时,则将第j个本征模态函数确定为噪声主导模式。
13、本发明解决其技术问题所采用的技术方案是:提供一种逐次变分模态分解的声音增强装置,包括:
14、逐次变分模态分解模块,用于对接收到的声音信号进行逐次变分模态分解,得到若干本征模态函数;
15、分类模块,用于引入相关系数和欧几里德距离来确定模态的分界点,将所述若干本征模态函数分为信号主导模式、噪声主导模式和纯噪音模式;
16、重构模块,用于保留所述信号主导模式,对所述噪声主导模式进行降噪,丢弃所述纯噪音模式,并基于降噪后的噪声主导模式与所述信号主导模式进行相加重构,得到声音增强信号。
17、所述分类模块包括:
18、排序单元,用于计算各个本征模态函数与所述声音信号之间的相关系数,并按照相关系数从大到小进行排序;
19、第一确定单元,用于计算相邻的本征模态函数的相关系数的差的比值来确定分界点,并根据所述分界点确定本征模态函数为信号主导模式还是剩余模式;所述剩余模式为所述噪声主导模式与纯噪音模式之和;
20、第二确定单元,用于计算所述剩余模式中每个本征模态函数与所述声音信号的欧几里德距离,并根据欧几里德距离来确定剩余模式中的本征模态函数为所述纯噪音模式还是所述噪声主导模式。
21、所述分界点的确定依据为:当第m+1个本征模态函数的相关系数与第m个本征模态函数的相关系数之差的绝对值小于第m个本征模态函数的相关系数与第m-1个本征模态函数的相关系数之差的绝对值,且第m个本征模态函数的相关系数与第m-1个本征模态函数的相关系数之差的绝对值大于第m-2个本征模态函数的相关系数与第m-1个本征模态函数的相关系数之差的绝对值时,将第m个本征模态函数作为分界点,在所述第m个本征模态函数之前的所有本征模态函数均为信号主导模式。
22、所述信号主导模式确定单元无法确定分界点时,将所述若干本征模态函数全部归于所述剩余模式。
23、所述纯噪音模式确定单元在所述剩余模式中的第j个本征模态函数与所述声音信号的欧几里得距离大于β倍的所述剩余模式中本征模态函数与所述声音信号的欧几里得距离的平均值时,将第j个本征模态函数确定为纯噪音模式;在所述剩余模式中的第j个本征模态函数与所述声音信号的欧几里得距离小于或等于β倍的所述剩余模式中本征模态函数与所述声音信号的欧几里得距离的平均值时,则将第j个本征模态函数确定为噪声主导模式。
24、有益效果
25、由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明使用相关系数和欧几里德距离的值作为分界标准,将分解后得到的本征模态函数分为了信号主导模式、噪音主导模式和纯噪音模式三类,并对信号主导模式进行保留,对噪音主导模式进行小波阈值去噪,对纯噪音模式进行丢弃,最后将信号主导模式和降噪后的噪音主导模式相加获得增强信号,尽可能地保留了有用信号,排除了噪音的干扰,提升声音增强的效果,为后续识别准确率提供基础。
- 还没有人留言评论。精彩留言会获得点赞!