一种用于智慧交通的太阳能路灯监测设备的制作方法
1.本实用新型涉及太阳能路灯技术领域,尤其涉及一种用于智慧交通的太阳能路灯监测设备。
背景技术:
2.随着道路的不断建设和经济飞速发展,道路运输作为交通运输业的一个重要组成部分在国家综合运输体系中的作用愈显突出
1.。截止到2019年,我国公路总里程已经超过501.25万公里
2.。然而伴随着道路交通的快速发展,人们在享受便捷生活的同时,也承受着交通事故带来的惨痛代价,特别以在弯曲道路或弯道与纵坡相结合的路段的车辆因违反道路交通安全法而造成的特大交通事故更引起全社会的广泛关注。据统计2019年我国交通事故累计200114起,其中弯道因素引发的交通事故约占总数的六分之一
3.。因此,我国的公路交通安全面临着严峻的挑战
4.。
3.然而,现有的安全辅助标志多采用在拐角处安放透镜的形式,这就使得驾驶人在转弯之前需细致观察透镜反射的道路另一侧路况,但是一旦驾驶员精力不集中或环境视线差观察不清晰以及透镜表面出现划痕、破损等缺陷时,则无法为道路安全通行提供必要的辅助,并且据调研,现有的透镜大概需在50m范围内才可使驾驶员较为清晰的观察到路另一侧的路况,从而留给驾驶人员的思考与反应时间极为短暂。因此,研发一种新型的交通安全辅助设备,对于提高公路弯道路段交通安全水平具有重要的意义。
4.以下给出检索的相关文献:
5.[1]高天柱.我国道路交通事故特点规律及预防研究[d].长安大学,2014.
[0006]
[2]2019年交通运输行业发展统计公报.[r].北京:交通运输部,2019.
[0007]
[3]中华人民共和国道路交通事故统计年报(2019年度)[r].北京:公安部交通管理局,2019.
[0008]
[4]王超深.公路弯道路段交通事故分析及安全对策研究[d].长安大学, 2010。
技术实现要素:
[0009]
为解决上述技术问题,本实用新型的目的是提供一种用于智慧交通的太阳能路灯监测设备,为车辆的弯道安全通行提供了技术支持,保障了山区弯道车辆的安全通行,降低了弯道事故率。同时本系统用电设备均可由所述太阳能光伏发电板的所发电能来提供,从而节约能源。本实用新型整体结构简单、工作稳定可靠,能起到智能化控制的作用。
[0010]
本实用新型的目的通过以下的技术方案来实现:
[0011]
一种用于智慧交通的太阳能路灯监测设备,包括:太阳能路灯结构和自动控制系统;所述太阳能路灯结构包括灯杆、太阳能光伏发电板、弧形灯臂、支撑杆、报警装置、视觉监测单元、第一显示屏、第一连接杆,第二显示屏、第二连接杆、灯杆基座;所述自动控制系统包括供电子系统、通信模块、工控机子系统与交互模块;
[0012]
所述太阳能光伏发电板设置在灯杆的顶部,并且在太阳能光伏发电板上安装有光
电传感器;
[0013]
所述视觉监测单元与所述工控机子系统连接,实现对采集图像的判断和决策;
[0014]
所述交互模块通过通信模块与所述工控机子系统连接,以对设备工作环节进行操作。
[0015]
与现有技术相比,本实用新型的一个或多个实施例可以具有如下优点:
[0016]
通过视觉监测单元对弯道路况实时监测,为车辆的弯道安全通行提供了有效技术支持,实现了智能设备与传统交通信号设备的协同工作,保障了山区弯道车辆的安全通行,降低了弯道事故率;
[0017]
采用太阳能光伏发电板发电后向用电设备供送,实现了能源的最大化利用,减少了化石能源发电所造成的有害气体排放;
[0018]
通过工控机子系统的实时监测,在蓄电池过充电或过放电情况下会自动切断电路,从而保护了蓄电池,延长其使用寿命、减少更换次数;
[0019]
本设备既可以实现自动化控制,又可以使操作人员通过交互模块远程定向控制来实现相应的功能;
[0020]
实现了太阳能路灯的智能化应用,为智慧交通和传感等领域提供了新的技术。
附图说明
[0021]
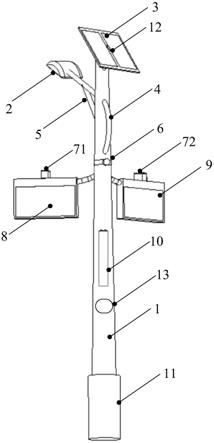
图1是本实用新型整体结构示意图;
[0022]
图2是本实用新型的应用场景示意图;
[0023]
图3是本实用新型的视觉监测单元结构示意图;
[0024]
图4是本实用新型的显示屏结构示意图;
[0025]
图5是本实用新型的工作原理示意图;
[0026]
图6是本实用新型的实施例2示意图。
具体实施方式
[0027]
为使本实用新型的目的、技术方案和优点更加清楚,下面将结合实施例及附图对本实用新型实施方式作进一步详细的描述。
[0028]
如图1所示,本实用新型提供的结构,包括所述设备包括太阳能路灯结构和自动控制系统;所述太阳能路灯结构包括灯杆1、太阳能光伏发电板3、弧形灯臂4、支撑杆5、报警装置6、视觉监测单元7、第一显示屏8、第一连接杆81、第二显示屏9、第二连接杆91、灯杆基座11;所述自动控制系统包括供电子系统10、通信模块13、工控机子系统14与交互模块15;所述太阳能光伏发电板3设置在灯杆1的顶部,并且在太阳能光伏发电板3上安装有光电传感器12;所述视觉监测单元7与所述工控机子系统14连接,实现对采集图像的判断和决策;所述交互模块15通过通信模块13与所述工控机子系统14连接,以对设备工作环节进行操作。
[0029]
上述通信模块13与交互模块15和工控机子系统14相连接,可使用所述交互模块15通过所述通信模块13与所述工控机子系统14建立通讯,实现人为与自动化的协同控制。
[0030]
上述弧形灯臂4固定在灯杆1上,所述灯杆1安装在灯杆基座11的正上方,且在弧形灯臂4上固定有照明设备2;所述支撑杆5连接在弧形灯臂4 与灯杆1之间;所述报警装置6安装在灯杆1顶部的一侧;所述第一显示屏 8固定在第一连接杆81上(如图4所示),并且在第
一显示屏8的正上方安装有第一相机安装架715和第一监测子系统71;所述第二显示屏9固定连接在第二连接杆91上,且在第二显示屏9的正上方安装有第二相机安装架725 和第二监测子系统72;所述供电子系统10和通信模块13分别安装在灯杆1 的内部。
[0031]
上述供电子系统10包括市电101和蓄电池102,且供电子系统10分别与所述光电传感器12和太阳能光伏发电板3相连,为用电设备提供电能。
[0032]
上述光电传感器12将光线照射的强弱信息传输到所述工控机子系统14 计算处理,依据事先的电压设定值来判断夜晚和白天,在白天时刻,所述太阳能光伏发电板3受阳光照射产生电能,并输送到蓄电池102中存储,夜晚时分,所述蓄电池102向用电设备供送电能,维持各类用电设备的正常工作。
[0033]
上述工控机子系统14实时监测蓄电池102的剩余容量,在所述蓄电池 102过充电状态下,自动切断供电;同样在所述蓄电池102过放电状态下,所述工控机子系统14立即发送相应指令到供电子系统10自动切断向用电设备的供电,防止过充电现象的出现,保护蓄电池102,并即刻将供电方式转换为市电101供送,以维持设备的正常运转。此外,在供电方式上,使用所述蓄电102与市电101两种电源,通过所述交互模块15可向工控机子系统 14发送相应信号自由选择电源。
[0034]
如图2所示,所述视觉监测单元7实时监测该处路况,所采集的图像传输到所述工控机子系统14进行计算处理,检测行人、车辆等移动目标物的方向、速度和相对于车道线位置信息,并依据相应的交通法规进行判断和决策,当发现任何异于常情或交通法规的行为时,所述工控机子系统14即刻发送相应指令到所述报警装置6发出报警,同时,报警信息实时显示在拐角两侧的第一显示屏8和第二显示屏9上,以快速、尽可能的通知过往车辆驾驶员集中注意力,保持避让。
[0035]
如图3所示,上述视觉监测单元7包括第一监测子系统71和第二监测子系统72;所述第一监测子系统中设置有第一保护罩711、第一广角镜头712、第一红外相机713、第一通信接口714和第一相机安装架715,该第一广角镜头712安装在第一红外相机713前,并且在第一广角镜头712和第一红外相机713的外部固定有第一保护罩711;所述第一红外相机713上设置有第一通信接口714。所述第二监测子系统72中设置有第二保护罩721、第二广角镜头722、第二红外相机723、第二通信接口724和第二相机安装架725,该第二广角镜头722安装在第二红外相机723前,并且在第二广角镜头722与第二红外相机723的外部固定有第二保护罩721;所述第二红外相机上设置有第二通信接口724。
[0036]
上述工控机子系统14包括信息处理子系统141和自适应控制子系统 142,并且分别与所述光电传感器12、第一显示屏8、第二显示屏9、视觉监测单元7、报警装置6、通信模块13、交互模块15及供电子系统10相连。
[0037]
如图5所示,上述信息处理子系统141对所述视觉监测单元7采集的路况图像进行分析和处理,识别感兴趣区域内的车辆、行人等移动目标的移动速度、方向和相对于车道线的位置,进一步对所求得的移动目标信息进行判断和决策,如果不符合相应的交通法规则立即传输相应信号到所述自适应控制子系统142,由所述自适应控制子系统142发送指令到所述报警装置6发出报警并在所述第一显示屏8和第二显示屏9上显示报警信息。
[0038]
操作人员可通过所述交互模块15和通信模块13发送相应指令到所述工控机子系统14,对各类参数设定值进行修改和调整,以达到交通法规和道路常情实时更新的目的。同
理,也可发送相应信息到所述第一显示屏8与所述第二显示屏9实时显示,进而更好的对交通秩序进行智能化管理。此外,还可人为对所述报警装置6进行消声、复位、自检操作,同时也可向所述供电子系统10发送指令,自主切换供电电源。
[0039]
实施例2
[0040]
如图6所示,弯道拐角两侧快速驶来两辆车,其中一侧的车辆在逐渐到达弯道拐角处100m左右的距离时开始减速鸣笛,但是另一侧车辆仍以原始车速行驶没有减速且该车辆的左侧车轮压倒道路中心线。此时,对路况实时监测的所述视觉监测单元7迅速对即将相会的两辆车进行成像,并传输到所述工控机子系统14中判断和决策各自是否有违反交通法规的驾驶行为,当检测到另一侧车辆超速且没有按照规定路线行驶时,快速发送相应信号到所述报警装置6和第一显示屏8、第二显示屏9,同时动作发出报警,既提醒违法车辆迅速更正,也立即提醒对侧车辆驾驶员集中注意力、保持避让。
[0041]
上述实施例视觉监测单元7对感兴趣目标进行图像采集后将图像传递给工控机子系统14进行分析和处理。若任意一侧过往车辆出现不符合正常交通法规的异常情况时,所述工控机子系统14立即发送信号到所述报警装置6 给本侧异常车辆发出报警,并提醒另一侧车辆注意避让,从而降低事故发生率。
[0042]
虽然本实用新型所揭露的实施方式如上,但所述的内容只是为了便于理解本实用新型而采用的实施方式,并非用以限定本实用新型。任何本实用新型所属技术领域内的技术人员,在不脱离本实用新型所揭露的精神和范围的前提下,可以在实施的形式上及细节上作任何的修改与变化,但本实用新型的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1