车辆前照灯的制作方法
1.本发明大体涉及车辆(尤其是机动车辆)的前照灯领域,并且更具体地涉及包括两个光源的前部前照灯领域,一个光源生成远光光束,另一个光源生成近光光束。
背景技术:
2.车辆前照灯或前大灯通常包括调节部件,所述调节部件布置用于确保对该光学模块的方位角和俯仰角调节。所述俯仰角对应于所述光学模块在竖直平面中的姿态或倾斜度。例如在文件fr3032513a和fr3026688a中描述了这种调节部件,这些文件更具体地涉及无玻璃前照灯。在这种前照灯中,光学模块的前表面由外透镜限界,其优点在于减少了由构成玻璃的材料对一部分光线(直到10%)的吸收。
3.对投射光束的俯仰角的调节可以例如取决于在车辆后部运输的负载,该负载使车辆前部抬高并且通常需通过这种调节进行补偿。更复杂的系统还在驾驶车辆时允许动态调节以便使得光束不会对迎面而来的道路用户造成眩目。这些系统通常配置用于在竖直平面中保持光束相对于水平参考线的不变倾斜度。文件fr3015003a描述了一种机动车辆前照灯,该机动车辆前照灯未设有玻璃并且包括配备有俯仰角调节的两个照明模块。
4.文件fr2745061a描述了一种机动车辆前照灯,所述机动车辆前照灯能够通过单一光源和镜子以简单且经济的方式生成两个光束,一个用于近光光束功能,另一个用于远光光束功能。
5.最近,还存在矩阵照明光束,所述矩阵照明光束由发光二极管(led)矩阵构成,这些发光二极管布置在平坦支撑件(例如印刷电路)上。这些led可分布为竖直带(有时称为“矩阵光束”),其中每个带独立于其它带运行。在变型中,这些led可分布为像素(像素照明),其中每个led可独立地被点亮或熄灭。
6.这些矩阵照明表示为自适应照明,在英文中以“adaptive driving beam(自适应远光灯系统)”的首字母缩写词adb为人所知,因为这些矩阵照明能够优化远光照明而不会使迎面而来的车辆或用户感到眩目。实际上,在主要用于远光光束的这些照明类型中,在相同的光束之中已经产生了彼此独立的照明区域,以便能够根据需要激活或熄灭这些区域。对与这些照明区块或区域相关联的led的激活的管理可通常由电子单元控制,所述电子单元联结至检测部件,所述检测部件用于检测目标的定位以便不在远光光束之中使其炫目。这种检测部件可以例如是红外摄像机。
7.adb(“矩阵”或“像素”)类型的照明模块使现场调节所需的机械运动在技术上变得复杂。出于这个原因,设有用于远光光束的abd模块和用于近光光束的标准模块的前照灯仅在与近光光束关联的标准模块上提供俯仰角调节。adb模块因此仍是固定(即不动)的模块。
8.这些前照灯的主要缺点在于如果这两个模块中的仅一个可调节俯仰角,则位于远光光束和近光光束之间的阴影区域有时可能产生并且成为对驾驶员的妨碍。
9.因此,找到一种有效且更充分的解决方案是有利的,该解决方案在保持经济的同时能够至少部分地解决上述缺点。
技术实现要素:
10.为此目的,本发明在第一方面涉及一种用于车辆的前照灯,所述前照灯配置用于在所述车辆前方生成照明区域,并且包括:
[0011]-配置用于发射远光光束的第一固定矩阵光源,
[0012]-配置用于发射近光光束的第二可移动光源,以及
[0013]-校正机构,所述校正机构配置用于在所述车辆行驶时使所述近光光束相对于水平参考线的竖直倾斜度保持不变。
[0014]
根据本发明,该车辆前照灯还包括屈光棱镜,所述屈光棱镜配置用于消除至少一个阴影区域,所述至少一个阴影区域能够在所述照明区域中产生于所述远光光束与所述近光光束之间。
[0015]
有利地,本发明的前照灯能够改善所述车辆的驾驶员在夜间驾驶时的舒适性和安全性,同时为配备有双光束构造的前照灯提供一种简单且经济的解决方案,所述双光束中的一个构成矩阵光源。实际上,由于本发明,能够产生于远光光束与近光光束之间的阴影区域或该阴影区域的至少一部分(尤其当该近光光束在俯仰角上被校正时)可借助于简单的补偿性光学部件消除,同时将adb模块保持为固定。
[0016]
在一个实施例中,所述屈光棱镜在以下位置之间可移动地装配在所述第一光源前方:
[0017]-工作位置,所述工作位置允许折射所述远光光束的入射光线,以及
[0018]-休止位置,所述休止位置对所述入射光线没有影响;
[0019]
并且,所述屈光棱镜包括:
[0020]-平坦入射面,以及
[0021]-平坦屈光面,所述入射光线从所述平坦屈光面以折射光束从所述屈光棱镜出射,所述折射光束用于在所述照明区域中以邻近或部分地叠加至所述近光光束的方式投射所述远光光束。
[0022]
优选地,所述屈光棱镜包括由所述入射面和所述平坦屈光面限定的角度,所述角度配置用于引起所述入射光线在1度与4度之间的竖直偏转。
[0023]
在一个实施例中,所述休止位置是所述屈光棱镜相对于所述入射光线的收起位置。
[0024]
根据一个实施例,所述屈光棱镜围绕旋转轴线可旋转地装配,所述旋转轴线位于所述入射光线之外。
[0025]
根据另一个实施例,所述屈光棱镜沿平移轴线可平移地装配。
[0026]
优选地,所述第一光源包括多个发光二极管,所述多个发光二极管以矩阵方式布置在平坦支撑件上,并且,所述屈光棱镜的入射面平行于所述平坦支撑件。
[0027]
在一个实施例中,由会聚透镜矩阵构成的初级光学部件布置在所述平坦支撑件前方,并且,所述棱镜的入射面位于所述会聚透镜的焦平面中。
[0028]
在一个优选实施例中,所述屈光棱镜构成偏转构件,所述偏转构件能够由来自于控制构件的控制信号激活和/或停止,所述控制构件配置用于防止或检测所述阴影区域。
[0029]
在第二方面中,本发明还涉及一种车辆,更具体地一种机动车辆,所述车辆包括前照灯,所述前照灯符合上述前照灯实施例中的任一项或符合这些实施例的任何可能的组
合。
附图说明
[0030]-图1是由第一类型的第一矩阵光源以及由第二标准光源获得的照明区域的示意图;
[0031]-图2是类似于图1的示意图,其中第一矩阵光源是第二类型的;
[0032]-图3是能够产生于所述第一和第二光源的光束之间的阴影区域的示意图;
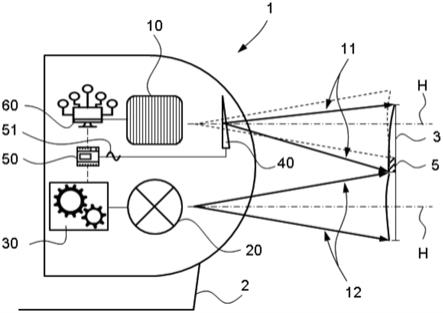
[0033]-图4是根据本发明的前照灯的主要元件的示意图;
[0034]-图5是根据本发明的第一固定矩阵光源的侧面示意图;
[0035]-图6是本发明的一个实施例的类似于图5的示意图;以及
[0036]-图7是本发明的另一个实施例的类似于图6的示意图。
具体实施方式
[0037]
图1示意性示出了由第一矩阵光源10以及由第二标准光源20获得的照明区域3。更确切地,第一光源10产生第一照明区域31,并且第二光源20产生第二照明区域32。在这种情况中,第一和第二照明区域31、32可被看作部分照明区域,因为仅当它们被一起考虑时它们才形成照明区域3。
[0038]
由水平轴线h和竖直轴线v形成的正交坐标系被示出为叠置于照明区域3上。第一光源10的照明是矩阵类型的并且由多个竖直照明条10’形成,所述多个竖直照明条彼此侧面相邻地对齐。每个竖直照明条10’可通常通过一列发光二极管(led)获得,所述一列发光二极管构成第一光源10的一部分。该照明类型的优点在于每个竖直照明条10’可独立地被点亮或熄灭。
[0039]
通过将第一光源10与矩阵照明管理构件60(图4)联结,根据当前时刻的需要来控制这些竖直照明条10’中的每个变得可能。更具体地,与红外摄像机或用于(在夜间条件下)检测可能被眩目的目标的任何其它车载检测系统的关联由此允许选择竖直照明条10’,该竖直照明条例如应被熄灭以不干扰所述目标(尤其当该目标是迎面而来的车辆或行人时)。该第一矩阵光源10可被描述为是自适应的,因为其能够动态地生成自适应或可调制光束。出于这个原因,这种照明类型通常已知为首字母缩略词adb(“adaptive driving beam”)。
[0040]
如果第一矩阵光源10通常用作远光光束,则更适度的第二光源通常专用于近光光束。该第二光源20通常不是矩阵类型的但传统上由灯泡(例如卤素灯泡或氙气灯泡)构成。
[0041]
为改善驾驶员的夜视能力并且不使迎面而来的道路用户感到眩目,额外的措施被添加至最新车辆的前照灯。该措施涉及动态地校正专用于近光光束前照灯的第二光源20的照明的俯仰角。为了记忆,这种调节涉及使所述近光光束的平均投射角度在竖直平面中发生变化,以便相对于水平参考线或水平轴线h校正部分照明区域32的高度。该校正动态地(即在所述车辆行驶期间的任何时刻)进行。通常,远光光束的上部光线通常被调节成具有在水平参考线h之下0.57
°
的倾斜度。该倾斜度对应于具有定向成从该光源朝向底部的1%斜率的角度。
[0042]
图2示出了图1提供的示例的一种变型。实际上,在图2中,第一光源10的矩阵照明是“像素”类型的照明,其中,竖直照明条10’已进一步由水平线细分以便获得多个像素10”。
每个像素10”可由二极管led或由多个二极管led的阵列构成。这种光源的优点在于该照明的粒度提供了比图1所示的第一光源10所提供的划分更精细的划分。
[0043]
图3示意性示出了无论如图1还是图2所示的设有光源10、20的前照灯所具有的主要问题。由于所述两个光源中的一个(尤其是生成近光光束的第二光源20)在俯仰角上动态地进行校正,阴影区域5能够有时在照明区域3中产生于部分照明区域31、32之间。该阴影区域5根据该车辆相对于地形的倾斜度或姿态出现并且可构成尤其对于该车辆的驾驶员的妨碍。本发明的目的尤其在于至少部分地消除该缺点。
[0044]
注意到,由于第一矩阵光源10所需的光学模块的复杂性,优选地该照明被实施为固定或不动。因此,与生成近光光束的第二光源20不同,生成远光光束的第一光源10应被认为不能够在俯仰角上倾斜。
[0045]
如图4上非常示意性地所示,为至少部分地解决上述问题,在第一方面,本发明的目的在于提供一种用于车辆2的前照灯1,该前照灯配置用于在车辆2前方生成照明区域3。该车辆的前照灯或前大灯可设有保护玻璃或优选地未设有这种玻璃。
[0046]
本发明的前照灯1包括:
[0047]-配置用于发射远光光束11的第一固定矩阵光源10,
[0048]-配置用于发射近光光束12的第二可移动光源20,以及
[0049]-校正机构30,所述校正机构配置用于在车辆2行驶时使近光光束12相对于水平参考线h的竖直倾斜度保持不变。
[0050]
根据本发明,该前照灯1还包括屈光棱镜40,所述屈光棱镜配置用于消除至少一个阴影区域5,所述至少一个阴影区域能够在所述照明区域3上产生于远光光束11与近光光束12之间。
[0051]
应当注意,可移动的第二光源20绝不限于能够提供在俯仰角上的校正,即在竖直平面中的校正,而且还可配置用于能够提供在方位角上的校正,即在水平平面中的校正。因此,俯仰角和/或方位角的校正也是动态校正,即优选地在该车辆行驶时连续执行的校正。因此,这种校正不会与由对光学部件进行临时调节的系统所提供的对这些光学部件的临时调节相混淆。这种调节可以例如用于由于该车辆所携带的负载而单独或临时补偿该车辆的姿态,或包括例如在该车辆的技术检查期间借助于通常由机械师操作的调节螺钉手动调节所述光学部件。最后,近光光束12相对于水平参考线v的竖直(即俯仰)倾斜度优选地不为零,如图4上示意性所示,而是定向成朝向底部(在水平线h之下),尤其如图1至图3所示。
[0052]
由于本发明的前照灯1所包括的屈光棱镜,如图3和图4所示的阴影区域5可有利地至少部分地被消除,同时既无需改变第一固定矩阵光源10,也无需改变第二可移动光源20。
[0053]
因此,第一矩阵光源所需的技术省去了任何用于使其移动的附加设备,这避免了该第一矩阵光源的脆化或复杂化。此外,通过容易地添加例如棱镜40的偏转构件以能够为该车辆的驾驶员消除由阴影区域5构成的缺点,从而便于对设有这种第一和第二光源的现有前照灯的适配。因此,对这种前照灯的适配有利地找到了一种既经济又有效的解决方案。
[0054]
图5是根据本发明的第一固定矩阵光源10的侧面示意图。在该图上注意到,该第一光源10优选地是光学模块m的一部分,该光学模块优选地包括与印刷电路相关联的散热器13,在该印刷电路上布置有发光二极管15的矩阵、初级光学部件17以及次级光学部件18。如该图所示,屈光棱镜40的存在能够在竖直平面中使发光光线a和b偏转成朝向底部并且分别
获得发光光线a’和b’,然后借助于次级光学部件18将这些发光光线朝向远方投射。该次级光学部件18可通常由投射透镜构成。
[0055]
棱镜40的屈光特性赋予其能够折射光线的能力,因此能够使远光光束11偏转定向成朝向底部的特定竖直倾斜度,如图4上示意性所示。棱镜40优选地是光学玻璃(例如冕牌玻璃或聚甲基丙烯酸甲酯(有机玻璃))棱镜。该屈光棱镜的偏转能力取决于该棱镜的角度以及其折射率n,并且更具体地取决于构成该棱镜的材料的折射率。
[0056]
根据本发明的优选实施例,如图6和图7所示,屈光棱镜40在以下位置之间可移动地装配在第一光源10前方:
[0057]-工作位置t,所述工作位置允许折射远光光束11的入射光线11’,以及
[0058]-休止位置r,所述休止位置对这些入射光线11’没有影响。
[0059]
此外,如在图5中最佳地所示,屈光棱镜40包括:
[0060]-平坦入射面41,以及
[0061]-平坦屈光面42,入射光线11’从所述平坦屈光面以折射光束11”从屈光棱镜40出射,所述折射光束用于在照明区域3中以邻近或部分地叠加至近光光束12的方式投射远光光束11。
[0062]
理解到,入射光线11’更确切地是位于远光光束11的光源处的光线。
[0063]
优选地,入射面41垂直于第一矩阵光源10的光学轴线x。也就是说,入射光线11’形成入射光束,该入射光束优选地垂直于所述屈光棱镜的入射面41。平坦屈光面42构成用于将作为透明介质的空气与棱镜材料分隔的表面。这些介质被认为是均质且各向同性的。
[0064]
如图5所示,所述棱镜的角度由入射面41以及由平坦屈光面42限定。优选地,所述棱镜的角度配置用于引起入射光线11’的竖直偏转δ,即在竖直平面中或在俯仰角上的偏转。该偏转优选地在1度与4度之间以便使其具有大约2%至7%的斜率(定向成朝向底部)。为获得这种偏转,所述棱镜的角度可在2度与4.5度之间,并且棱镜40的折射率n可在1.49与1.90之间,因此包括诸如聚甲基丙烯酸甲酯(有机玻璃)等材料以及整个光学玻璃系列。
[0065]
在一个实施例中,休止位置r是屈光棱镜40相对于入射光线11’的收起位置。
[0066]
图6是一个实施例的示意图,其中,屈光棱镜40围绕旋转轴线45可旋转地装配,所述旋转轴线位于所述入射光线11’之外。有利地,该实施例是一个相对紧凑的示例,其能够保持专用于第一光源10的光学模块m的现有尺寸。
[0067]
图7是另一个实施例的示意图,其中,屈光棱镜40沿平移轴线47可平移地装配。
[0068]
无论以何种方式使棱镜40可移动,可以通过简单的机构容易地获得该移动性,所述简单的机构例如使用致动器,例如步进电机、直流电机、螺线管或压电装置。
[0069]
如图5至图7所示,第一矩阵光源10优选地由多个发光二极管15构成,所述多个发光二极管以矩阵方式布置在平坦支撑件14上。这种支撑件14可有利地包括布置有二极管led的印刷电路。这些led的矩阵布置可限定竖直照明条10’(图1)和像素10”(图2)。竖直照明条10’或像素10”的led的数量是无关紧要的。还优选地,屈光棱镜40的入射面41平行于平坦支撑件14。
[0070]
还优选地,初级光学部件17由会聚透镜17’的矩阵构成。在一个优选实施例中,该初级光学部件布置在平坦支撑件14前方,并且棱镜40的入射面41位于会聚透镜17’的焦平面f中。还优选地,这些会聚透镜是完全相同的并且因此都具有完全相同的焦距。此外,初级
光学部件17的会聚透镜17’的矩阵优选地布置成与led矩阵重合以便使得每个led与所述初级光学部件的会聚透镜相关联。还优选地,初级光学部件17的焦平面f还包括次级光学部件18(投射透镜)的焦点。
[0071]
如图6和图7所示,屈光棱镜40构成可激活和/或可停止的偏转构件。如图4所示,对该偏转构件的激活或停止可优选地由来自于控制构件50的控制信号控制。所述控制构件50可配置用于防止或检测阴影区域5。
[0072]
在一个实施例中,控制构件50可以是用于控制校正机构30的倾斜角(俯仰角)的控制构件,并且可配置用于在该倾斜角(在竖直平面中)达到阈值时生成并向所述偏转构件(棱镜40)传输控制信号51。该阈值可以是预限定的值,所述预限定的值对应于例如具有2%或低于该值的斜率(定向成朝向底部)的角度。上述倾斜角通常对应于车辆2的姿态并且可由校正机构30确定并且/或者来自于该校正机构。
[0073]
控制信号51可以是二进制信号或更复杂的信号,该信号载有至少一个补充信息或数据。
[0074]
在一个实施例中,控制信号51包括:
[0075]-激活信号,所述激活信号在所述倾斜角大于或等于所述阈值时被传输至所述偏转构件(棱镜40),以及
[0076]-停止信号,所述停止信号在所述倾斜角小于所述阈值时被传输至所述偏转构件。
[0077]
作为变型,在所述偏转构件的默认位置是休止位置r或工作位置t的情况下,所述控制信号可包括单一激活或停止信号。
[0078]
在一个实施例中,控制构件50是用于检测阴影区域5的检测构件。这种构件可以是摄像机或另一种尤其是光电类型的构件。
[0079]
在另一个实施例中,控制信号51配置成从属于用于管理第一光源10的矩阵照明的管理构件60。以这种方式,在照明区域3中存在位于或被检测到在远光光束11与近光光束12之间的目标的情况下,能够停止所述偏转构件(棱镜40)。这种目标可以是迎面而来的行人或车辆并且不应使其炫目而阻碍其移动。管理构件60可以是与专用于管理第一矩阵光源的led的构件相同的构件。这种管理构件60可因此包括微型电脑或至少一个设有固件的处理器。
[0080]
在第二方面中,本发明还涉及一种车辆2,尤其是一种机动车辆,所述车辆包括前照灯1,该前照灯符合上述前照灯实施例中的任一项或符合这些实施例的任何可能组合。
[0081]
本发明的附加特征在第一方面中涉及一种车辆前照灯,所述车辆前照灯配置用于在所述车辆的前方生成照明区域,并且包括:
[0082]-配置用于发射远光光束的第一固定矩阵光源,
[0083]-配置用于发射近光光束的第二可移动光源,以及
[0084]-校正机构,所述校正机构配置用于在所述车辆行驶时使所述近光光束相对于水平参考线的竖直倾斜度保持不变。
[0085]
此处,所述车辆前照灯还包括具有至少一个平坦入射面的屈光透镜,该屈光透镜配置用于消除至少一个阴影区域,所述至少一个阴影区域能够在所述照明区域中产生于所述远光光束与所述近光光束之间。
[0086]
有利地,根据所述补充特征的第一方面,所述前照灯能够改善所述车辆的驾驶员
在夜间驾驶时的舒适性和安全性,同时为配备有双光束构造的前照灯提供一种简单且经济的解决方案,所述双光束中的一个构成矩阵光源。实际上,能够产生于远光光束与近光光束之间的阴影区域或该阴影区域的至少一部分(尤其当该近光光束在俯仰角上被校正时)可借助于简单的补偿性光学部件消除,同时将adb模块保持为固定。
[0087]
在所述补充特征的第一方面的一个实施例中,所述屈光棱镜在以下位置之间可移动地装配在所述第一光源前方:
[0088]-工作位置,所述工作位置允许折射所述远光光束的入射光线,以及
[0089]-休止位置,所述休止位置对所述入射光线没有影响;
[0090]
并且,所述屈光透镜包括出射面,所述入射光线从所述出射面以折射光束出射,所述折射光束用于在所述照明区域中以邻近或部分地叠加至所述近光光束的方式投射所述远光光束。
[0091]
在所述补充特征的第一方面的一个实施例中,所述屈光透镜沿平移轴线可平移地装配,并且所述出射面构成至少部分弯曲的屈光面,该屈光面具有使所述折射光束可变偏转的能力,该能力取决于所述屈光透镜在所述平移轴线上的位置。
[0092]
在所述补充特征的第一方面的一个实施例中,所述屈光面还包括平行于所述屈光透镜的入射面的平行部分,并且所述平行部分构成所述屈光透镜的休止位置。
[0093]
优选地,所述第一光源包括多个发光二极管,所述多个发光二极管以矩阵方式布置在平坦支撑件上,并且,所述屈光透镜的入射面平行于所述平坦支撑件。
[0094]
在所述补充特征的第一方面的一个实施例中,由会聚透镜矩阵构成的初级光学部件布置在所述平坦支撑件前方,并且,所述屈光透镜的平坦入射面位于所述会聚透镜的焦平面中。
[0095]
在所述补充特征的第一方面的一个优选实施例中,所述屈光棱镜构成偏转构件,所述偏转构件能够由来自于控制构件的控制信号激活和/或停止,所述控制构件配置用于防止或检测所述阴影区域。
[0096]
优选地,所述控制构件是用于控制所述校正机构的倾斜角的控制构件,并且该构件配置用于在所述倾斜角达到阈值时生成并向所述偏转构件传输所述控制信号。
[0097]
在所述补充特征的第一方面的另一个实施例中,所述控制信号配置成从属于第一光源的矩阵照明管理构件,以便在所述照明区域中存在位于所述远光光束与所述近光光束之间的目标的情况下能够停止所述偏转构件。
[0098]
所述补充特征的第二方面还涉及一种车辆,尤其是一种机动车辆,所述车辆包括前照灯,该前照灯符合上述前照灯实施例中的任一项或符合这些实施例的任何可能组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1