车辆用红外线灯具系统、车辆用红外线传感器系统、车辆用红外线传感器内置灯具及光学传感器内置灯具的制作方法
1.本发明涉及用于机动车等车辆的车辆用红外线灯具系统、车辆用红外线传感器系统、车辆用红外线传感器内置灯具以及光学传感器内置灯具。
背景技术:
2.由专利文献1等已知有暗视装置。
3.专利文献1:(日本)特开2014-127924号公报
4.然而,某个车辆为了使由红外线得到的图像清晰,而照射红外线或提高照射的红外线的强度。但是,当对面车或前行车等其他车辆位于本车辆的前方时,若对该其他车辆照射了红外线则以强的强度反射,在本车辆的红外线摄像头的图像上产生光晕。在这样产生了光晕的情况下,通过降低红外线摄像头的灵敏度,能够得到不产生光晕的图像。然而,在这种情况下得到的来自红外线摄像头的图像中可能未拍摄到行人等反射强度低的物体。
5.本发明的目的在于提供一种车辆用红外线灯具系统,能够抑制在红外线摄像头的图像上产生光晕,并且也能够检测红外线的反射强度低的物体。
技术实现要素:
6.本发明一方面的车辆用红外线灯具系统搭载在搭载有红外线摄像头的车辆上,其中,具有:红外线光源,其射出红外线;光学部件,其使从所述红外线光源射出的红外线向灯具前方射出;其他车辆位置取得部,其取得对面车或前行车的位置信息;控制部,其基于所述其他车辆位置取得部取得的所述对面车或所述前行车的位置信息,以在所述对面车或所述前行车的至少一部分形成红外线的照射强度比其他区域的照射强度低的减光区域的方式控制所述红外线光源的点亮状态。
7.根据本发明,能够提供一种车辆用红外线灯具系统,能够抑制在红外线摄像头的图像上产生光晕并且能够检测红外线的反射强度低的物体。
8.本发明一方面的车辆用红线外传感器系统,其用于搭载有红外线摄像头和红外线传感器的车辆,其中,具有:红外线光源;光学部件,其将从所述红外线光源射出的红外线向灯具前方射出;控制部,其控制所述红外线光源的点亮状态,所述控制部能够以适于利用所述红外线摄像头拍摄的第一模式和适于利用所述红外线传感器感测的第二模式驱动所述红外线光源,所述控制部根据所述红外线传感器的输出,在基于所述第一模式的驱动时,设定红外线的照射强度比其他区域低的减光区域。
9.根据本发明,能够提供一种车辆用红外线传感器系统,其能够利用共同的光源射出适于红外线摄像头和红外线传感器的光。
10.本发明一方面的车辆用红外线传感器内置灯具具有:可见光单元,其具有射出可见光的可见光光源;投影透镜,其向前方射出可见光;反射型的红外线截止滤光片;红外线传感器,其检测红外线;所述红外线截止滤光片配置在所述可见光光源与所述投影透镜之
间,所述红外线传感器配置于通过所述红外线截止滤光片折回的所述投影透镜的虚拟焦点附近,从所述可见光光源射出的可见光透过所述红外线截止滤光片并入射所述投影透镜,从灯具前方经由所述投影透镜向所述红外线截止滤光片射入的红外线朝向所述红外线传感器反射。
11.根据本发明,能够提供不易导致车辆大型化、重量化、具有红外线传感器的车辆用红外线传感器内置灯具。
12.本发明一方面的光学传感器内置灯具,具有:第一光源;光学传感器;第二光源,其射出具有与所述第一光源射出的光的峰值波长不同的峰值波长且所述光学传感器的感光灵敏度高的波长的光;扫描部,其将从所述第一光源射出的光、以及从所述第二光源射出的光向灯具前方扫描并射出;投影透镜,其将从所述扫描部射出的光向灯具前方投影;第一基板,其配置有所述第一光源,具有向所述第一光源供电的功能;第二基板,其配置有所述第二光源,具有向所述第二光源供电的功能,从所述扫描部观察时,所述第二基板设置在所述第一基板的后方,在所述第一基板设有使从所述第二光源射出的光向所述扫描部透过的空隙部。
13.根据本发明,提供了抑制大型化、提高了向车辆的搭载性的光学传感器内置灯具。
14.根据本发明,能够提供一种车辆用红外线灯具系统,该车辆用红外线灯具系统能够在抑制在红外线摄像头的图像上产生光晕的同时检测红外线的反射强度低的物体。
附图说明
15.图1是装入本发明第一实施方式的车辆用红外线灯具系统的车辆系统的框图;
16.图2是表示搭载在车辆用灯具上的灯具单元的内部结构的示意图;
17.图3是表示车辆用红外线灯具系统执行的处理的一例的流程图;
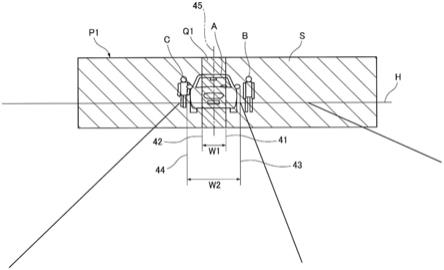
18.图4是表示照射到其他车辆的配光图案的一例的图;
19.图5是表示在照射其他车辆的配光图案中取得余量而形成的减光区域的一例的图;
20.图6是表示车辆用红外线灯具系统执行的处理的另一例的流程图;
21.图7是表示向前行车和对面车照射的配光图案的一例的图;
22.图8是装入有本发明第二实施方式的车辆用红外线传感器系统的车辆系统的框图;
23.图9是表示搭载在车辆用灯具上的灯具单元的内部结构的示意图;
24.图10是搭载在灯具单元上的红外线光源的主视图;
25.图11是表示灯具单元的红外线的可照射范围的示意图;
26.图12是表示感测模式时的配光图案的一例的示意图;
27.图13是表示摄像模式时的配光图案的一例的示意图;
28.图14是表示红外线光源的点亮正时和红外线摄像头的曝光正时的时序图;
29.图15是装入本发明第三实施方式的车辆用红外线传感器内置灯具的车辆系统的框图;
30.图16是表示车辆用红外线传感器内置灯具的内部结构的示意图;
31.图17是搭载在车辆用红外线传感器内置灯具上的可见光光源的主视图;
detection and ranging或laser imaging detection and ranging:光探测和测距或激光成像探测与测距)。lidar是通常在其前方射出非可见光,基于出射光和返回光取得到物体的距离、物体的形状、物体的材质等信息的传感器。摄像头6和雷达7(传感器的一例)构成为检测车辆1的周边环境(其他车、行人、道路形状、交通标识、障碍物等),并将周边环境信息输出到车辆控制部3。
48.hmi8由接受来自驾驶员的输入操作的输入部和向驾驶员输出行进信息等的输出部构成。输入部包括方向盘、加速踏板、制动踏板、切换车辆1的驾驶模式的驾驶模式切换开关等。输出部是显示各种行进信息的显示器。
49.gps 9构成为取得车辆1的当前位置信息,并将所获取的当前位置信息向车辆控制部3输出。无线通信部10构成为从其他车接受与位于车辆1周围的其他车相关的信息(例如,行驶信息),并且向其他车发送与车辆1相关的信息(例如,行驶信息)(车车间通信)。另外,无线通信部10构成为从信号机和标识灯等基础设施接收基础设施信息,并且将车辆1的行驶信息发送给基础设施(路车间通信)。地图信息存储部11是存储有地图信息的硬盘驱动器等外部存储装置,构成为将地图信息向车辆控制部3输出。
50.当车辆1以自动驾驶模式行驶时,车辆控制部3基于行驶状态信息、周边环境信息、当前位置信息、地图信息等,自动生成转向控制信号、加速控制信号以及制动控制信号中的至少一个。转向驱动器12构成为从车辆控制部3接收转向控制信号,并基于接收到的转向控制信号来控制转向装置13。制动驱动器14构成为从车辆控制部3接收制动控制信号,基于接收到的制动控制信号控制制动装置15。加速驱动器16构成为从车辆控制部3接收加速控制信号,基于接收到的加速控制信号来控制加速装置17。这样,在自动驾驶模式下,车辆1的行驶由车辆系统2自动控制。
51.另一方面,在车辆1以手动驾驶模式行驶的情况下,车辆控制部3根据驾驶员对加速踏板、制动踏板及方向盘的手动操作,生成转向控制信号、加速控制信号及制动控制信号。这样,在手动驾驶模式下,由于通过驾驶员的手动操作生成转向控制信号、加速控制信号以及制动控制信号,所以车辆1的行驶由驾驶员控制。
52.接下来,对车辆1的驾驶模式进行说明。驾驶模式由自动驾驶模式和手动驾驶模式构成。自动驾驶模式由完全自动驾驶模式、高度驾驶辅助模式和驾驶辅助模式构成。在完全自动驾驶模式下,车辆系统2自动地进行转向控制、制动控制和加速控制的所有行驶控制,并且驾驶员不处于能够驾驶车辆1的状态。在高度驾驶辅助模式下,车辆系统2自动地进行转向控制、制动控制以及加速控制的全部行驶控制,并且,驾驶员虽然处于能够驾驶车辆1的状态,但不驾驶车辆1。在驾驶辅助模式下,车辆系统2自动地进行转向控制、制动控制以及加速控制中的一部分行驶控制,并且在车辆系统2的驾驶辅助下,驾驶员驾驶车辆1。另一方面,在手动驾驶模式下,车辆系统2不自动地进行行驶控制,并且无车辆系统2的驾驶辅助,驾驶员驾驶车辆1。
53.另外,车辆1的驾驶模式也可以通过操作驾驶模式切换开关来切换。在该情况下,车辆控制部3根据驾驶员对驾驶模式切换开关的操作,将车辆1的驾驶模式在四个驾驶模式(完全自动驾驶模式、高度驾驶辅助模式、驾驶辅助模式、手动驾驶模式)之间切换。另外,车辆1的驾驶模式可以基于关于自动驾驶车可行驶的可行驶区间或禁止自动驾驶车的行驶的禁止行驶区间的信息或关于外部天气状态的信息自动地切换。此时,车辆控制部3基于这些
信息来切换车辆1的驾驶模式。此外,车辆1的驾驶模式也可以通过使用就座传感器或面部朝向传感器等而自动切换。在这种情况下,车辆控制部3基于来自就座传感器或面部朝向传感器的输出信号,切换车辆1的驾驶模式。
54.车辆用红外线灯具系统100具备车辆用红外线灯具4、与车辆用红外线灯具4连接的其他车辆位置取得部102及距离取得部103。
55.车辆用红外线灯具4具有能够照射红外线的灯具单元30和控制车辆用红外线灯具4的各部的控制部101。车辆用红外线灯具4搭载在车辆1的前部。
56.其他车辆位置取得部102是取得其他车辆(例如,包括前行车或对面车等)的位置信息的取得部。其他车辆位置取得部102例如基于由搭载在车辆1上的红外线摄像头或可见光摄像头等(车载摄像头6的一例)拍摄到的图像取得其他车辆的位置信息。另外,其他车辆位置取得部102例如基于由lidar(雷达7的一例)取得的信息取得其他车辆的位置信息。
57.距离取得部103是取得其他车辆与本车辆1的距离的取得部。距离取得部103例如基于由lidar取得的信息取得与其他车辆的距离信息。另外,距离取得部103例如通过对由车载摄像头6拍摄到的图像进行解析处理,取得与其他车辆的距离信息。
58.其他车辆位置取得部102及距离取得部103与车辆用红外线灯具4的控制部101连接。灯具单元30、其他车辆位置取得部102及距离取得部103由控制部101控制。另外,其他车辆位置取得部102和距离取得部103在本实施方式中为与控制部101独立的构成,但是也可以构成为例如作为执行控制部101的处理的处理部而包含在控制部101中。
59.图2是表示搭载在车辆用红外线灯具4上的灯具单元30的内部结构的示意图。如图2所示,灯具单元30具有壳体30a、红外线光源32、旋转反射器33(光学部件的一例)、红外线摄像头34、透镜部件35和遮光壁36。
60.壳体30a的内部由遮光壁36划分为第一灯室37和第二灯室38两个空间。红外线光源32和旋转反射器33设置在第一灯室37。红外线摄像头34设置在第二灯室38。
61.红外线光源32由射出红外线的led(light emitting diode:发光二极管)构成。红外线光源32也可以由射出红外线的ld(laser diode:激光二极管)构成。在要求通过红外线光源32照射大范围的情况下,优选使用出射光的扩散程度大的led。在由红外线光源32要求其他车辆等的感测的情况下,优选使用出射光的扩散度小的ld。红外线光源32搭载在基板39上。红外线光源32例如在三个红外线光源32沿竖直方向在基板39上延伸的虚拟直线上排列并设有多列。红外线光源32也可以每列搭载led或ld。通过控制部101控制在基板39上排列的红外线光源32的竖直方向和水平方向上的点亮正时。
62.旋转反射器33是扫描从红外线光源32射出的红外线并向灯具前方射出的扫描装置。旋转反射器33绕旋转轴线r旋转。旋转反射器33具有绕旋转轴线r延伸的轴部33a和从轴部33a在径向上延伸的两块板33b。板33b的表面构成为反射面。该反射面是扭转形状,其相对于旋转轴线r的角度在周向上逐渐变化。具体地,形成为如下形状,即,当从红外线光源32射出的红外线被旋转反射器33的反射面反射时,被反射并射出的方向逐渐从左端变化到右端。因此,灯具单元30能够在规定范围的区域中扫描并射出来自红外线光源32的光。例如,灯具单元30可向图4所示的可照射范围p1照射红外线。
63.在壳体30a的前方设有透镜部件35。透镜部件35具有第一透镜元件35a和第二透镜元件35b。第一透镜元件35a配置在第一灯室37的前方。从红外线光源32射出并由旋转反射
器33反射的光入射第一透镜元件35a。第一透镜元件35a使该入射的红外线光源32的光向灯具前方射出。旋转反射器33的反射点配置在第一透镜元件35a的焦点附近。第二透镜元件35b配置在第二灯室38的前方。第二透镜元件35b汇集来自灯具前方的光、例如由其他车辆等对象物反射的反射光,将汇集的光引导到红外线摄像头34。红外线摄像头34的感光面配置在第二透镜元件35b的焦点附近。第一透镜元件35a的后方焦点f1的距离小于第二透镜元件35b的后方焦点f2的距离。第一透镜元件35a和第二透镜元件35b一体地形成为单个透镜部件35。
64.红外线摄像头34是对从红外线光源32射出的红外线的峰值波长具有最高的灵敏度的摄像头。红外线摄像头34输出与所接收到的红外线的强度对应的信号。红外线摄像头34可取得与从红外线光源32向灯具前方射出的红外线的反射光相应的图像。将红外线摄像头34取得的图像向控制部101发送。
65.遮光壁36设置在第一透镜元件35a的光轴与第二透镜元件35b的光轴之间。例如,遮光壁36设置在将从红外线光源32射出且不射入第一透镜元件35a而要射入红外线摄像头34的光遮挡的位置。
66.参照图3和图4说明车辆用红外线灯具系统100的动作例。图3是表示车辆用红外线灯具系统100执行的处理的一例的流程图。图4是表示从车辆1的灯具单元30向其他车辆照射的配光图案的一例的图。
67.在车辆1的行驶中,车辆用红外线灯具系统100的控制部101在通常状态下在车辆用红外线灯具4可照射红外线的最大范围(以下称为可照射范围)p1的全部区域设定有通常区域。车辆用红外线灯具系统100的控制部101向照射与通常区域对应的区域的红外线光源32供给例如第一电流值的电流,以某个照度照射红外线。
68.车辆1开始行驶后,立即如上所述地在可照射范围p1的所有区域设定有通常区域,以均匀的照度对可照射范围p1照射红外线。在该状态下,由红外线摄像头34拍摄本车辆1前方的图像。由红外线摄像头34拍摄的图像被发送到控制部101。
69.控制部101基于由红外线摄像头34拍摄到的图像,判定在所拍摄到的图像中是否存在其他车辆(步骤s01)。控制部101判定例如在红外线摄像头34取得的图像中亮度达到规定值以上的像素中存在其他车辆,将与该像素对应的位置确定为其他车辆的位置。此外,控制部101也可以参照在由红外线摄像头34拍摄的图像中从本车辆1的基准点观察到的对象物构成的方位角来确定其他车辆的位置。或者,也可以基于在由红外线摄像头34拍摄的图像中对象物占据的多个像素的区域来确定其他车辆的位置。
70.在判定为在拍摄到的图像中不存在其他车辆的情况下(步骤s01:否),控制部101以在可照射范围p1的整个区域中维持了通常区域的状态结束处理。
71.另一方面,在判定为在拍摄到的图像中存在其他车辆的情况下(步骤s01:是),控制部101将由红外线摄像头34拍摄到的图像与检测到的与其他车辆相关的信息一起发送给其他车辆位置取得部102和距离取得部103。
72.在本例中,如图4所示,通过红外线摄像头34拍摄了在本车辆1的前方存在其他车辆a的图像。因此,控制部101在上述步骤s01中检测其他车辆。
73.其他车辆位置取得部102基于由红外线摄像头34拍摄到的图像,取得检测到的其他车辆a的左端部的位置信息和右端部的位置信息(步骤s02)。所取得的其他车辆的位置信
息从其他车辆位置取得部102发送到控制部101。
74.距离取得部103基于由红外线摄像头34拍摄到的图像,取得检测到的其他车辆a与本车辆1的距离信息(步骤s03)。所取得的其他车辆a的距离信息从距离取得部103发送到控制部101。
75.控制部101基于由其他车辆位置取得部102取得的其他车辆a的位置信息、以及由距离取得部103取得的其他车辆a的距离信息,将其他车辆a的至少一部分的区域设定在红外线的照射强度比向其他区域照射的红外线的照射强度低的减光区域(步骤s04)。本例的减光区域指的是红外线的照射强度比上述通常区域低的区域。控制部101向红外线光源32供给比上述第一电流值小的第二电流值的电流,以比通常区域的照度低的照度用红外线照射减光区域。
76.例如,控制部101基于由其他车辆位置取得部102取得的其他车辆a的右端部及左端部的位置信息,如图4所示,将减光区域q1的右边界线41设定在比其他车辆a的右端部43更靠左方,将减光区域q1的左边界线42设定在比其他车辆a的左端部44更靠右方。即,减光区域q1的宽度w1设定为比其他车辆a的宽度w2窄的宽度。另外,减光区域q1设定在其他车辆a的车宽方向的中央部。此外,控制部101也可以例如基于从其他车辆位置取得部102取得的其他车辆a的右端部及左端部的位置信息,确定其他车辆a的车宽方向上的中央位置45,将减光区域q1的右边界线41设定在中央位置45与其他车辆a的右端部之间,将减光区域q1的左边界线42设定在中央位置45与其他车辆a的左端部之间。
77.另外,例如,控制部101也可以基于从距离取得部103取得的其他车辆a与本车辆1的距离信息,设定与从本车辆1到其他车辆a的距离对应的红外线光源32的减光程度。具体而言,从本车辆1到其他车辆a的距离越近,越减小向红外线光源32供给的第二电流值,加大红外线光源32相对于减光区域q1的减光程度。与此相反,从本车辆1到其他车辆a的距离越远,越增大向红外线光源32供给的第二电流值,减小红外线光源32相对于减光区域q1的减光程度。
78.另外,控制部101将可照射范围p1内的除减光区域q1以外的区域设定为通常区域s。
79.如上所述,上述实施方式的车辆用红外线灯具系统100构成为在红外线的反射强度高的其他车辆所处的区域形成减光区域q1。因此,相对于在可照射范围p1内存在的其他车辆,可照射弱照度的红外线,能够使该红外线自其他车辆的反射强度减弱。因此,能够抑制由从其他车辆反射的红外线在本车辆1的红外摄像头34的图像上产生光晕。另外,车辆用红外线灯具系统100由于在设定于减光区域q1的区域以外的区域设定有通常区域s,故而在该通常区域s照射照度比减光区域q1高的红外线。因此,例如如图4所示,通过红外线摄像头34容易检测到在其他车辆a的旁边的行人b或其他车辆a的后面的行人c等其他车辆附近的红外线的反射强度低的物体。
80.另外,众所周知,在用可见光照射本车辆前方的车辆用前照灯中,为了不给其他车辆的驾驶员带来眩目,检测其他车辆的位置并在该范围设定抑制了可见光的照度的减光区域。图5是表示在光源射出可见光的情况下,在其他车辆a上设定的减光区域q2的一例的图。如图5所示,在照射可见光的情况下,为了不给其他车辆a的驾驶员带来眩目,将减光区域q2的右边界线51设定在其他车辆a的右端部43的右方,将左边界线52设定在其他车辆a的左端
部44的左方。即,照射可见光时的减光区域q2设定在相对于其他车辆a的区域设有余量的区域。减光区域q2的宽度w3设定为比其他车辆a的宽度w2宽的宽度。在这种情况下,虽然能够抑制相对于其他车辆a的驾驶员的眩目,但是难以取得与其他车辆a的区域相关的信息和与在其他车辆a的附近的步行者b、c相关的信息。
81.对此,车辆用红外线灯具系统100由红外线光源32构成照射前方的光源。另外,如图4所示,减光区域q1形成在其他车辆a的车宽方向的内侧(中央部)。红外线光源的光由于是红外线,故而与可见光不同,不会给其他车辆的驾驶员带来眩目。另外,在红外线摄像头搭载在车辆上的情况下,大多搭载在车辆的宽度方向中央。因此,根据该结构,能够不给其他车辆a的驾驶员带来眩目,并且即使在其他车辆a上搭载了红外线摄像头,也能够难以对该红外线摄像头赋予刺眼的光。另外,由于在减光区域q1以外的区域设定有通常区域s,所以能够通过本车辆1的红外摄像头34取得与其他车辆a的除了中央部以外的左端部和右端部相关的信息。
82.另外,根据车辆用红外线灯具系统100,构成为根据从本车辆1到其他车辆a的距离,从红外线光源32向减光区域q1照射的红外线的减光程度变化。因此,根据适于到其他车辆a的距离的红外线的照射强度,能够正确地取得与所有其他车辆相关的信息。
83.(变形例)
84.参照图6和图7说明车辆用红外线灯具系统100的其他动作例。图6是表示车辆用红外线灯具系统100执行的处理的另一例的流程图。图7是表示从车辆1的灯具单元30向前行车和对面车照射的配光图案的一例的图。在本例中,车辆用红外线灯具系统100根据其他车辆是对面车还是前行车来设定减光区域和遮光区域。
85.在图6中到步骤s11为止的处理是与上述图3中的到步骤s01为止的处理相同的处理。
86.在本例中,如图7所示,通过红外线摄像头34拍摄了在本车辆1的前方存在其他车辆a、d的图像。因此,控制部101在上述步骤s11中检测其他车辆a、d。
87.其他车辆位置取得部102基于由红外线摄像头34拍摄到的图像,取得所检测到的其他车辆a的左端部的位置信息及右端部的位置信息、其他车辆d的左端部的位置信息及右端部的位置信息(步骤s12)。所取得的其他车辆a、d的位置信息分别从其他车辆位置取得部102发送到控制部101。
88.距离取得部103基于由红外线摄像头34拍摄到的图像,取得检测到的其他车辆a与本车辆1的距离信息、以及其他车辆d与本车辆1的距离信息(步骤s13)。所取得的其他车辆a的距离信息及其他车辆d的距离信息被从距离取得部103发送到控制部101。
89.控制部101判定检测到的其他车辆是前行车还是对面车(步骤s14)。比较例如正时不同的两张红外线摄像头的图像,在其他车辆的位置超过阈值而大幅变化的情况下,或者其他车辆所占据的区域超过阈值而大幅变化等情况下,判定该其他车辆是对面车,否则的情况下判定该其他车辆是前行车。或者,在车辆1搭载有雷达的情况下,如果到检测到反射波为止的时间比规定值短,或者反射波的波长超过阈值但短,则可以判定为该其他车辆是对面车,否则该其他车辆也可以判定为前行车。在以下说明中,判定为其他车辆a是对面车,其他车辆d是前行车。
90.控制部101在判定为检测到的其他车辆d是前行车的情况下(步骤s14:是),基于由
其他车辆位置取得部102取得的前行车d的位置信息、以及由距离取得部103取得的前行车d的距离信息,将前行车d的至少一部分区域设定为红外线的照射强度比通常区域低的减光区域(步骤s15)。
91.另一方面,控制部101在判定为检测到的其他车辆a是对面车的情况下(步骤s14:否),基于由其他车辆位置取得部102取得的对面车a的位置信息、以及由距离取得部103取得的对面车a的距离信息将相对车a的至少一部分区域设定为不照射红外线的遮光区域(步骤s16)。在扫描遮光区域的正时,控制部101使供给红外线光源32的电流为零,使红外线光源32熄灭。
92.如图7所示,控制部101与上述图3的步骤s04中的减光区域q1的设定相同,在前行车d的车宽度方向的中央部设定减光区域q1,在对面车a的车宽度方向的中央部设定遮光区域t。另外,控制部101与上述图3的步骤s04中的红外线光源32的减光程度的设定同样地,根据从本车辆1到对面车a的距离、以及从本车辆1到前行车d的距离设定红外线光源32的减光程度。
93.根据这样的车辆用红外线灯具系统100,在对面车a的车宽方向的中央部形成遮光区域t。因此,例如,即使在对面车a上搭载有红外线摄像头,也能够不对该红外线摄像头赋予刺眼的光。另外,在前行车d的车宽方向的中央部形成减光区域q1。因此,在紧挨着前行车d存在物体的情况下,例如,如图7所示,在减光区域q1的范围内的前行车d与本车辆1之间存在步行者e的情况下,由于以弱照度向前行车d照射红外线,所以能够通过本车辆1的红外线摄像头34检测步行者e。另外,也有在前行车d上搭载有取得后方信息的后部红外线摄像头的情况。通过照射减光区域q1的红外线,虽然有可能使该前行车d的后部红外线摄像头产生光晕,但是这样的后部红外线摄像头用于停车时等,不用于行驶时。因此,在行驶中,即使从后方向前行车d照射红外线也不容易产生问题。
94.另外,遮光区域的照度只要比减光区域的照度低即可,也可以对遮光区域照射红外线。
95.另外,本发明不限于上述实施方式,能够适当地自如进行变形、改进等。另外,上述实施方式中的各构成要素的材质、形状、尺寸、数值、形态、数量、配置场所等只要能够达成本发明就任意,不受限制。
96.在上述实施方式中,说明了利用旋转反射器33扫描从红外线光源32射出的红外线,经由透镜部件35向灯具前方射出的光学部件,但不限于此。例如,也可以是由阵列型的红外线光源构成红外线光源32和旋转反射器33的部分,将该光源的光经由透镜部件35向灯具前方射出的光学部件。多阵列型的红外线光源例如是多个红外线光源分别排列在纵向及横向上的构造的光源。各个红外线光源构成为可向分别不同的方向射出光,通过全部的红外线光源照射灯具前方的规定范围。通过控制特定的红外线光源的点亮状态,控制灯具前方的特定区域的照度。
97.另外,在上述实施方式中,红外线摄像头34设置在与红外线光源32共同的灯具单元30内(灯具内),但不限于此。例如,红外线摄像头34也可以不设置在灯具内,而设置在车辆1的其他部位。
98.另外,在上述实施方式中,说明了对减光区域照射弱照度的红外线的例子,但也可以例如不对减光区域照射红外线。
99.《第二实施方式》
100.接着,说明本发明第二实施方式的车辆用红外线传感器系统。
101.近年来,在车辆上搭载了摄像头、红外线光电二极管等基于多个检测原理的传感器单元。这样,若将多种传感器单元分别搭载在车辆上,则车辆大型化。
102.本发明第二实施方式提供一种车辆用红外线传感器系统,其能够利用共同的光源射出适于红外线摄像头和红外线传感器的光。
103.图8是车辆系统2的框图,该车辆系统2装入有本发明第二实施方式的车辆红外线传感器系统1100。
104.搭载该车辆系统2的车辆1与上述第一实施方式相同,是能够以自动驾驶模式行驶的车辆(机动车)。如图8所示,车辆系统2包括车辆控制部3、传感器5、摄像头6、雷达7、hmi(human machine interface:人机界面)8、gps(global positioning system:全球定位系统)9、无线通信部10、地图信息存储部11。另外,车辆系统2具备转向驱动器12、转向装置13、制动驱动器14、制动装置15、加速驱动器16、加速装置17。另外,车辆系统2具备车辆用红外线传感器系统1100。由于这些部件与图1所示的第一实施方式相同,所以标注相同的标记并省略其详细的说明。
105.摄像头(车载摄像头)6例如是包含ccd(charge-coled device:电荷收集装置)、cmos(互补型mos)等摄像元件的摄像头。摄像头6的拍摄基于从车辆控制部3发送的信号进行控制。摄像头6可基于接收到的可见光生成图像。摄像头6具有检测红外线的红外摄像头6a。红外线摄像头6a能够基于感光的红外线生成图像。
106.车辆用红外线传感器系统1100具备灯具单元1030和搭载控制部1101的车辆用灯具1004(例如头灯等)。控制部1101控制车辆用灯具1004的动作。控制部1101与车辆控制部3可通信地连接。车辆用灯具1004搭载在车辆1的前部。
107.图9是表示搭载在车辆用灯具1004上的灯具单元1030的内部结构的示意图。如图9所示,灯具单元1030具有壳体1030a、红外线光源1032、红外线传感器1034、透镜部件1035和遮光壁1036。
108.壳体1030a的内部由遮光壁1036分隔成第一灯室1037和第二灯室1038两个空间。红外线光源1032设置在第一灯室1037。红外线传感器1034设置在第二灯室1038。
109.红外线光源1032由射出红外线的多个led(light emitting diode:发光二极管)构成。红外线光源1032搭载在基板1039上。搭载在基板1039上的红外线光源1032的点亮熄灭由控制部1101控制。红外线光源1032被驱动控制为例如适于用红外摄像头6a拍摄的摄像模式(第一模式)用的点亮熄灭状态和适于用红外线传感器1034感测的感测模式(第二模式)用的点亮熄灭状态。
110.红外线传感器1034由检测红外线的光电二极管(pd)构成。红外线传感器1034输出对应于所接收到的红外线的强度的信号。红外线传感器1034输出感光的红外线的强度越高、信号强度越高的信号。红外线传感器1034对从红外线光源1032射出的红外线的峰值波长具有最高的感光灵敏度。红外线传感器1034构成为接收从红外线光源1032向灯具前方射出的红外线的反射光,并且检测反射光的峰值波长。红外线传感器1034取得的关于反射光的信息被发送到控制部1101。基于从控制单元1101发送的信号来控制红外线传感器1034的动作,例如检测红外线的感测动作等。
111.红外线摄像头6a是对从红外线光源1032射出的红外线的峰值波长具有最高的灵敏度的摄像头。红外线摄像头6a可取得与从红外线光源1032向灯具前方射出的红外线的反射光对应的图像。红外线摄像头6a取得的图像被发送到控制部1101。红外线摄像头的操作、例如拍摄车辆1前方的拍摄动作等既可以基于从车辆控制部3发送的信号来控制,也可以基于从控制部1101发送的信号来控制。
112.在壳体1030a的前部设有透镜部件1035。透镜部件1035具有投影透镜1035a(光学部件的一例)和聚光透镜1035b。投影透镜1035a配置在第一灯室1037的前部。从红外线光源1032射出的光入射投影透镜1035a。投影透镜1035a将该入射的红外线光源1032的光向灯具前方射出。红外线光源1032配置在投影透镜1035a的焦点附近。聚光透镜1035b配置在第二灯室1038的前部。聚光透镜1035b汇集来自灯具前方的光,例如从红外线光源1032射出并被其他车辆等检测对象物反射的反射光,将汇集的光引导到红外线传感器1034。红外线传感器1034的感光面配置在聚光透镜1035b的焦点附近。投影透镜1035a的后方焦点的距离比聚光透镜1035b的后方焦点的距离短。投影透镜1035a和聚光透镜1035b作为单个透镜部件1035而一体形成。
113.遮光壁1036设置在投影透镜1035a的光轴与聚光透镜1035b的光轴之间。例如,遮光壁1036设置在将从红外线光源1032射出且不入射投影透镜1035a而直接入射红外线传感器1034的光遮挡的位置。
114.图10是红外线光源1032的主视图,如图10所示,红外线光源1032具有上下方向(01~10)和左右方向(a~p)的二维地阵列状排列的多个红外线led。在以下的说明中,将从图10的顶部起第n个(n是01~10中的任一个)并且从右起位于第x个(x是a~p中的任一个)的红外线光源1032称为红外线lednx,例如,红外线led 03j是指从图10的顶部起位于第03个且从右起位于第j个的红外线led。
115.各个红外线led 01a~10p可向分别不同的方向射出光。红外线光源1032构成为由控制部1101控制,并且通过控制特定的红外线led的点亮熄灭状态来控制灯具前方的特定区域的照度。
116.在本实施方式中,控制部1101以适于用红外线摄像头拍摄的摄像模式(第一模式)和适于用红外线传感器感测的感测模式(第二模式)驱动红外线光源1032。以下,使用图11~图13来说明摄像模式和感测模式。
117.图11是表示灯具单元1030的可照射范围q的示意图。图11的可照射范围q例如在车辆用灯具1004的25m前方设置了虚拟竖直屏幕时显示在该竖直屏幕上。可照射范围q是灯具单元1030可照射红外线的最大范围,通过点亮红外线光源1032的全部红外线led 01a~10p来照射。
118.在图11中为了便于说明,将可照射范围q在纵向方向上划分为10个区域,在横向方向上划分为11个区域。在图11的可照射范围q中,将从纵向方向的上数第n个(n为01~10中的任一个)且在横向方向上从左起第x个(x为从a到p中的任一个)指定的区域称为区域qnx。例如,如果在图10中点亮位于右上端部的红外线led 01a,则向位于图11中的右上端部的区域q01a照射红外线。或者若将红外线led 06p点亮,则光照射图11中的区域q06p。在本车辆用红外线传感器系统1100中,在存储器中记录有在点亮了各个红外线led 01a~10p时,红外线照射到哪个区域q01a~q10p,控制单元1101能够从该存储器读取相关的信息。
119.在以后的说明中,将从纵向的上数第n个且横向的全部区域称为区域qn。该区域qn是在左右方向上延伸的带状区域。例如,从纵向方向的上数第7个横向的第a~p个区域称为区域q07。若将图10中的红外线led 07a~07p点亮,则向区域q07照射红外线。在本实施方式中,分割可照射范围q,以使h线位于区域q06与区域q07之间。
120.图12是作为感测模式表示控制部1101驱动红外线光源1032时照射的照射图案的示意图。如图12所示,在本例中作为感测模式,控制部1101为了感测其他车辆等检测对象物,以照射区域q02、区域q04和区域q06的方式控制紫外线光源1032。
121.控制部1101在感测模式下,通过在任意瞬时只点亮一个红外线led,依次变更点亮的红外线led,感测在可照射范围q内是否存在其他车辆等对象物。控制部1101通过红外线传感器1034检测有无来自任意方向的红外线的反射光,确定灯具前方的对象物的有无及位置。例如,当红外线传感器1034从某个方向检测到规定值以上的强度的反射光时,控制部1101判定为在该方向上存在其他车辆。
122.例如,控制部1101在区域q02内,在任意瞬间只点亮一个红外线led,并且依次改变点亮的红外线led,由此扫描沿左右方向延伸的区域q02。具体地,控制部1101通过依次点亮熄灭红外线led02a~10p扫描带状的区域q02。区域q02的扫描结束后,依次扫描区域q04、区域q06。另外,在本例中,作为感测模式照射区域q02、q04和q06,但是感测模式的照射范围不限于此。
123.如图12所示,在本车辆的前方存在其他车辆z的情况下,在向区域q04d~q04g、q06d~q06g照射红外线时,红外线传感器1034检测强度强的反射光。即,控制部1101在点亮红外线led 04d~04g、06d~06g时,从红外线传感器1034输出规定值以上的信号。因此,控制部1101判定为其他车辆位于区域q04d~q04g、q06d~q06g,在其他区域不存在其他车辆。
124.图13是表示作为摄像模式,控制部1101驱动红外线光源1032时照射的照射图案的示意图,在图13中,控制部1101形成有包含通常区域和减光区域的配光图案。在摄像模式下,与感测模式不同,控制部1101同时点亮多个红外线led 01a~10p。
125.控制部1101在摄像模式下,在不存在其他车辆z的区域设定通常区域s,在存在其他车辆z的区域设定减光区域r。在图示例中,将包含其他车辆z存在的区域q04d~q04g、q06d~q06g的上下方向上的全部区域qd、qe、qf、qg设定为减光区域r,将其他区域设定为通常区域s。
126.控制部1101将第一电流值的电流供给将红外线照射到通常区域s的红外线led,并且将低于第一电流值的第二电流值的电流供给将红外线照射到减少区域r的红外线led。即,控制部1101对减光区域r照射红外线,以成为比通常区域s的照度低的照度。
127.如上所述,在本实施方式中,控制部1101根据在感测模式下照射红外线时得到的红外线传感器1034的输出,在基于摄像模式的红外线光源1032驱动时,设定红外线的照射强度比其他区域s低的减光区域r。由此,在利用红外线摄像头6a拍摄车辆前方时,能够抑制来自反射强度高的其他车辆z的红外线的反射光的强度与来自其他区域的红外线的反射光的强度大大地不同,能够抑制在由红外线摄像头6a取得的图像中产生光晕。
128.根据本实施方式的车辆用红外线传感器系统1100,构成为红外线光源1032的驱动被切换为适于用红外线摄像头6a进行拍摄的摄像模式和适于用红外线传感器1034感测的感测模式。因此,能够由共同的红外线光源1032射出红外线摄像头6a用的光和红外线传感
器1034用的光。因此,能够削减构成车辆用红外线传感器系统1100的零件的数量,能够抑制车辆1的大型化。
129.此外,控制部1101根据红外线传感器1034的输出,在基于摄像模式的驱动时,设定红外线的照射强度低于其他区域s的减光区域r。因此,在通过红外线摄像头6a拍摄车辆前方时,能够抑制自反射强度高的物体(其他车辆z等)的红外线的反射光的强度和自其他区域的红外线的反射光的强度有很大的不同,能够抑制在由红外线摄像头6a取得的图像产生光晕。
130.另外,根据车辆用红外线传感器系统1100,红外线光源1032由二维排列有多个红外线led的多阵列型光源构成,因此,能够正确且容易地控制可照射范围q中的特定区域的照度。此外,能够以简单的结构射出红外线摄像头6a用的光和红外线传感器1034用的光。
131.另外,根据车辆用红外线传感器系统1100,在投影透镜1035a的焦点附近配置有红外线光源1032,在聚光透镜1035b的焦点附近配置有红外线传感器1034。因此,能够高精度地将红外线光源1032的光向任意方向射出,能够提高红外线传感器1034的检测精度。另外,由于投影透镜1035a和聚光透镜1035b为一体,因此能够抑制零件个数的增大。
132.另外,根据车辆用红外线传感器系统1100,设有遮光壁1036,该遮光壁1036防止从红外线光源1032射出的光直接射入红外线传感器1034。因此,在红外线传感器1034的光检测时能够抑制红外线光源1032的光直接射入红外线传感器1034,并且能够提高红外线传感器1034的检测精度。
133.另外,根据车辆用红外线传感器系统1100,在摄像模式下,构成为使各个红外线led 01a~10p一起点亮,对红外线摄像头6a的视角内的所有区域照射红外线。另外,构成为在感测模式下,通过在任意的瞬间只点亮一个红外线led,依次改变点亮的红外线led,检测有无来自任意方向的红外线的反射光,检测灯具前方的物体的有无及位置。因此,在摄像模式下,能够提高红外线摄像头6a的拍摄精度,在感测模式下,能够提高红外线传感器1034的检测精度。
134.接着,详细说明红外线光源1032的点亮正时和红外线摄像头6a的曝光正时。图14是表示红外线光源1032的点亮正时和红外线摄像头6a的曝光正时的时序图。
135.如图14所示,控制部1101驱动红外线光源1032,以反复进行摄像模式和感测模式。另外,控制部1101与作为红外线摄像头6a的曝光正时的快门打开期间和快门关闭期间连动而切换摄像模式和感测模式。即,当控制部1101以感测模式驱动红外线光源1032时,将红外线摄像头6a设为快门关闭期间,并且在摄像模式下驱动红外线光源1032时,将红外线摄像头6a设为快门打开期间。
136.控制部1101在感测模式下,在任意瞬间点亮一个红外线led,熄灭剩余的红外线led。在下一瞬间,点亮下一个红外线led,熄灭剩余的红外线led。这样,通过依次点亮熄灭红外线led,扫描可照射范围q。这样当控制部1101在感测模式下驱动红外线光源1032时,将红外线摄像头6a设为快门关闭期间,使红外线传感器1034动作。如上所述,根据红外线传感器1034的输出设定通常区域s和减光区域r。
137.控制部1101在摄像模式下,向所有的红外线led供给第一电流值或第二电流值的电流,使红外线led发光。由此,以适于红外线摄像头6a的拍摄的亮度,用红外线照亮车辆前方。当在摄像模式下驱动红外线光源1032时,控制部1101将红外线摄像头6a设为快门打开
期间。此时,控制部1101可以使红外线传感器1034处于非动作状态。
138.在这样的感测模式和摄像模式下,控制部1101对红外线led 01a~10p进行pwm(pulse width modulation:脉宽调制)控制。控制部1101控制为在摄像模式下对红外线led 01a~10p通电的电流的功率比在感测模式下对红外线led 01a~10p通电的电流的功率大。另外,控制部1101控制为在摄像模式时向红外线led 01a~10p通电的瞬间电流值i2比在感测模式时向红外线led 01a~10p通电的瞬间电流值i1小。
139.另外,摄像模式时的红外线led 01a~10p的控制和感测模式时的红外线led 01a~10p的控制也可以控制为例如输入红外线led 01a~10p的脉冲的通电时间或者输入红外线led 01a~10p的脉冲的非通电时间不同。另外,摄像模式时的红外线led 01a~10p的控制和感测模式时的红外线led 01a~10p的控制也可以控制为例如对红外线led 01a~10p投入的投入电流不同。当根据红外线传感器1034的感测结果在摄像模式时设定减光区域时,控制部1101例如改变输入到红外线led 01a~10p的脉冲的通电时间、脉冲的非通电时间和投入电流中的至少一个。
140.另外,例如,在将脉冲电流输入到红外线led 01a~10p的情况下,控制部1101在感测模式下,如上所述地在任意瞬间使一个红外线led点亮熄灭,并使点亮熄灭的红外线led依次变化。因此,输入各个红外线led 01a~10p的脉冲电流的通电正时被控制为彼此不重合。
141.如上所述,根据本实施方式的车辆用红外线传感器系统1100,构成为与红外线摄像头6a的曝光正时连动而切换摄像模式和感测模式。因此,在红外线摄像头6a拍摄时不照射感测用的强度强的红外线,容易通过红外线摄像头6a得到鲜明的图像。
142.另外,根据车辆用红外线传感器系统1100,构成为在摄像模式下通电的电流的功率比在感测模式下通电的电流的功率大。因此,在感测模式下可得到红外线的强反射光,容易提高红外线传感器1034的检测精度。
143.另外,根据车辆用红外线传感器系统1100,构成为在摄像模式下通电的瞬间电流值比在感测模式下通电的瞬间电流值小。在红外线摄像头6a拍摄时,与以局部强烈的照度照射红外线相比,在更大的范围照射适度照度的光更好。另一方面,在由红外线传感器1034进行感测时,优选特定区域以强照度照射红外线。根据本实施方式,通过单个红外线光源1032得到合于要求彼此不同特性的两个场景中的每一个的配光图案。
144.另外,根据车辆用红外线传感器系统1100构成为,在根据红外线传感器1034的输出切换摄像模式和感测模式时,改变输入红外线光源1032的脉冲的通电时间、非通电时间以及接通电流的至少一个。
145.另外,根据车辆用红外线传感器系统1100构成为,在感测模式下,输入各个红外线led 41a~50p的脉冲电流的通电正时不相互重叠。因此,能够提高检测从各红外线led 41a~50p射出的红外线反射光的红外线传感器1034的检测精度。
146.另外,本发明不限于上述实施方式,能够适当地进行变形、改进等。除此之外,上述实施方式中的各构成要素的材质、形状、尺寸、数值、形态、数量、配置场所等只要能够实现本发明就是任意的,不作限定。
147.在上述实施方式中,表示在车辆用灯具1004内搭载有红外线光源1032和红外线传感器1034的例子,但不限于此。例如,红外线摄像头6a也可以与红外线光源1032和红外线传
感器1034一同搭载在车辆用灯具1004内。另外,在车辆用灯具1004内也可以仅搭载红外线光源1032、红外线传感器1034、红外线摄像头中的红外线光源1032。
148.另外,在上述实施方式中,红外线光源1032由射出红外线的led构成,但也可以例如构成为包含射出红外线的ld(laser diode:激光二极管)。在要求用红外线光源1032照射大范围的情况下,优选使用出射光的扩散程度大的led。在通过红外线光源1032要求其他车辆等的感测的情况下,优选使用出射光的扩散程度小的ld。因此,可以将红外线光源1032例如形成为在左右方向上的每一列上搭载led或ld。
149.《第三实施方式》
150.然而,近年来要求在车辆上搭载暗视装置等各种传感器,容易使车辆大型化或加重。
151.本发明第三实施方式提供一种不易导致车辆的大型化、重量化的具有红外线传感器的车辆用红外线传感器内置灯具。
152.图15是装入有本发明第三实施方式的车辆用红外线传感器内置灯具2004的车辆系统2的框图。搭载该车辆系统2的车辆1是能够以自动驾驶模式行驶的车辆(机动车)。如图15所示,车辆系统2具有车辆控制部3、车辆用红外线传感器内置灯具2004、传感器5、摄像头6、雷达7、hmi(human machine interface:人机界面)8、gps(global positioning system:全球定位系统)9、无线通信部10、地图信息存储部11。另外,车辆系统2具有转向驱动器12、转向装置13、制动驱动器14、制动装置15、加速驱动器16和加速装置17。
153.车辆用红外线传感器内置灯具2004具备可见光单元2020、红外线单元2030、控制部2101。车辆用红外线传感器内置灯具2004是搭载在车辆1的前部的灯具(例如,头灯等)。可见光单元2020是可射出可见光的单元。红外线单元2030是可射出红外线的单元。控制部2101与车辆控制部3可通信地连接。车辆控制部3在满足了规定条件的情况下,生成用于控制车辆用红外线传感器内置灯具2004的点亮熄灭的指示信号,并将该指示信号发送到控制部2101。控制部2101基于接收到的指示信号来控制可见光单元2020、红外线单元2030等的动作。由控制部2101取得的信息以及由车辆控制部3取得的信息在相互间被接收发送。
154.摄像头(车载摄像头)6例如是包含ccd(charge-coled device:电荷收集装置)或cmos(互补型mos)等摄像元件的摄像头。摄像头6的拍摄基于从车辆控制部3发送的信号进行控制。摄像头6可基于所接收的可见光生成图像。摄像头6也可以是检测红外线的红外线摄像头。红外线摄像头可基于接收的红外线生成图像。
155.图16是表示车辆用红外线传感器内置灯具2004的内部结构的示意图。如图16所示,车辆用红外线传感器内置灯具2004具有壳体2040、透镜部件2045、遮光壁2046、可见光单元2020、红外线单元2030、红外线截止滤光片2034和红外线传感器2035。
156.壳体2040的内部由遮光壁2046划分为第一灯室2047和第二灯室2048两个空间。可见光单元2020、红外线截止滤光片2034和红外线传感器2035设置在第一灯室2047。红外线单元2030设置在第二灯室2048。
157.在壳体2040的前部设有透镜部件2045。透镜部件2045具有第一透镜部2045a和第二透镜部2045b。第一透镜部2045a配置在第一灯室2047的前部。第二透镜部2045b配置在第二灯室2048的前部。第一透镜部2045a和第二透镜部2045b作为单个透镜部件2045一体形成。
158.可见光单元2020具有射出可见光的可见光光源2021和搭载有该可见光光源2021的基板2022。可见光光源2021由多个可见光led(light emitting diode:发光二极管)构成。可见光光源2021的点亮熄灭由控制器2101控制。
159.图17是可见光光源2021的主视图。如图17所示,可见光光源2021具有以上下方向(01~10)和左右方向(a~p)的二维阵列状排列的多个可见光led。在以下的说明中,将从图17的上部起位于第n(n是01~10中的任一个)且从左起位于第x个(x是a~p中的任一个)的可见光led称为可见光lednx。例如,可见光led 03j是指从图17的上部起位于第03个且从左起位于第j个的可见光led。各个可见光led 01a~10p可向各自不同的方向射出光。可见光光源2021被控制部2101控制,构成为通过控制特定的可见光led的点亮熄灭状态来控制灯具前方的特定区域的照度。在本实施方式中,控制部2101控制可见光光源2021,以形成适合于由从可见光光源2021射出的可见光观察确认车辆1的前方的配光图案。
160.返回图16,红外线单元2030具有射出红外线的红外线光源2031、搭载该红外线光源2031的基板2032和反射红外线的旋转反射器2033。红外线光源2031由多个红外线ld(laser diode:激光二极管)构成。在本实施方式中,三个红外线光源2031在基板2032上下方向上排列设置。红外线光源2031在车辆用红外线传感器内置灯具2004的正面看中设置在不与第一透镜部2045a重叠的位置。由此,从红外线光源2031射出的红外线不被第一透镜部2045a遮挡而向灯具前方射出。各个红外线光源2031的点亮熄灭正时由控制部2101控制。
161.旋转反射器2033是扫描从红外线光源2031射出的红外线并向灯具前方射出的扫描装置。旋转反射器2033绕旋转轴线r旋转。旋转反射器2033具有绕旋转轴线r延伸的轴部2033a和从轴部2033a沿径向延伸的多个板2033b。板2033b的表面是反射面。该反射面形成为相对于旋转轴线r的角度在周向上逐渐变化的扭转形状。具体地,形成为如下的形状,即,当从红外线光源2031射出的红外线被设置在旋转反射器2033的外周面的反射面反射时,反射并射出的方向根据旋转反射器2033的旋转相位从左端逐渐变化到右端。旋转反射器2033的反射点配置在第二透镜单元2045b的焦点附近。旋转反射器2033的动作由控制部2101控制。
162.控制部2101控制红外线单元2030,以通过从红外线光源2031射出的红外线形成适于感测其他车辆等对象物的配光图案。更具体地,控制部2101通过控制红外线光源2031的点亮正时和旋转反射器2033的旋转相位,使红外线光源2031的红外线向灯具前方的任意位置射出。
163.可见光光源2021由于被用作照射用于观察确认车辆1的前方的光的光源,故而要求照射大范围。与此相对,红外线光源2031由于被用作照射用于感测其他车辆等对象物的光的光源,因此要求以强的照度照射特定区域。因此,优选采用出射光的扩散程度大的led作为可见光光源2021,采用出射光的扩散程度小的ld作为红外线光源2031。
164.从可见光光源2021射出的可见光入射到透镜部件2045的第一透镜部2045a。第一透镜部2045a使该入射的可见光向灯具前方射出。第一透镜部2045a作为使从可见光光源2021射出的可见光向灯具前方射出的投影透镜起作用。
165.另外,第一透镜部2045a将来自灯具前方的光,例如从红外线光源2031射出并被其他车辆等对象物反射的红外线的反射光聚光,经由红外线截止滤光片2034导向红外线传感器2035。第一透镜部2045a作为使红外线聚光于红外线传感器2035的聚光透镜起作用。
166.从红外线光源2031射出并由旋转反射器2033反射的红外线入射透镜部件2045的第二透镜部2045b。第二透镜部2045b作为使从红外线光源2031射出的红外线向灯具前方射出的投影透镜发挥作用。
167.遮光壁2046设置在第一透镜部2045a的光轴与第二透镜部2045b的光轴之间。例如,遮光壁2046设置在防止从可见光光源2021射出的可见光不射入第一透镜部2045a而直接向第二透镜部2045b射入的位置、即设置在防止从红外线光源2031射出的红外线不射入第二透镜单元2045b而直接向第一透镜部2045a射入的位置。
168.红外线截止滤光片2034是反射型的光学滤光片,其通过反射红外线来抑制红外线的透过。红外线截止滤光片2034配置在第一灯室内、可见光光源2021与第一透镜部2045a之间。红外线截止滤光片2034使经由第一透镜部2045a从灯具前方向该红外线截止滤光片2034射入的红外线向红外线传感器2035反射。另外,红外线截止滤光片2034使从可见光光源2021射出的可见光透过。透过了红外线截止滤光片2034的可见光入射第一透镜部2045a。
169.红外线传感器2035由检测红外线的光电二极管(pd)构成。红外线传感器2035配置在由红外线截止滤光片2034折回的第一透镜部2045a的虚拟焦点附近。红外线传感器2035输出与检测到的红外线的强度对应的信号。红外线传感器2035在检测到的红外线的强度越高时、输出信号强度越高的信号。红外线传感器2035对从红外线光源2031射出的红外线的峰值波长具有最高的感光灵敏度。红外线传感器2035接收从红外线光源2031向灯具前方射出的红外线的反射光,并且检测反射光的峰值波长。红外线传感器2035获取的关于反射光的信息被发送到控制部2101。基于从控制部2101发送的信号来控制红外线传感器2035的动作,例如检测红外线的感测动作等。
170.接着,说明控制部2101对其他车辆等对象物进行感测的控制。
171.图18是表示从红外线单元2030的红外线光源2031射出的红外线照射的区域的示意图。图18所示的示意图例如显示在设置于车辆用红外线传感器内置灯具2004的25m前方的虚拟竖直屏幕上。
172.控制部2101控制红外线单元2030,以通过从红外线光源2031射出的红外线对其他车辆等对象物进行感测。
173.范围q01是由从设置在基板2032上的最上方的红外线光源2031射出的红外线照射的区域。在点亮设置在最上方的红外线光源2031之后,立即向包括范围q1的左端的范围q1的一部分区域q1a照射红外线。随着旋转反射器2033的旋转,照射红外线的区域q1a向右侧移动。这样,当旋转反射器2033旋转一圈时,最上方的红外线光源2031将红外线照射到范围q1的所有区域。
174.范围q03是由从设置在基板2032上的最下方的红外线光源2031射出的红外线照射的区域。在将设置在最下方的红外线光源2031点亮之后,立即向包括范围q3的左端的范围q3的一部分区域照射红外线。随着旋转反射器2033的旋转,照射红外线的区域向右侧移动。这样,当旋转反射器2033旋转一圈时,最下方的红外线光源2031将红外线照射到范围q3的所有区域。
175.范围q02是由从设置在基板2032上的上下方向中间的红外线光源2031射出的红外线照射的区域。在将设置在中间的红外线光源2031点亮后,立即向包含范围q2的左端的范围q2的一部分区域照射红外线。随着旋转反射器2033的旋转,照射红外线的区域向右侧移
动。这样,当旋转反射器2033旋转一圈时,中间的红外线光源2031向红外线照射范围q2的所有区域照射红外线。
176.范围q01、q02、q03是沿左右方向延伸的直线状。各范围q01~q03优选在竖直方向上具有0.4度以上的上下宽度。范围q03的区域与h线重合。
177.从红外线单元2030射出的红外线被灯具前方的物体反射。该反射的红外线通过第一透镜部2045a,由红外线截止滤光片2034反射,并被引导到红外线传感器2035。
178.如图18所示,在本车辆的前方存在其他车辆ca的情况下,在将照射其他车辆ca所占据的区域的红外线光源2031点亮时,红外线传感器2035检测强度强的红外线。当从红外线传感器2035输出的信号强度为规定值以上时,控制部2101判定为在该范围存在其他车辆ca。预先在存储器中记录有旋转反射器2033的旋转相位和此时的红外线光源2031照射红外线的区域(位置)。控制部2101可访问该存储器。在红外线传感器2035输出规定值以上的信号强度的信号时,控制部2101取得旋转反射器2033的旋转相位,取得红外照射到哪个区域,并且判断为在照射红外线的区域中存在其他车辆ca。
179.接着,对控制部2101基于上述感测的结果变更可见光的配光图案的控制进行说明。
180.图19是表示通过从可见光单元2020的可见光光源2021射出的可见光形成的可见光配光图案的一例的示意图。图19也表示在与上述图18同样地设置的虚拟竖直屏幕上。
181.可照射范围t是车辆用红外线传感器内置灯具2004可照射可见光的最大范围,通过点亮可见光光源2021的全部可见光led 01a~10p,能够照射可见光。在图19中,为了便于说明,可照射范围t在纵向上被划分为10个区域,在横向上被划分为11个区域。在可照射范围t中,将从纵向的上数第n个(n为01~10中的任一个)且在横向上从左数第x个(x为a~p中的任一个)指定的区域称为范围tnx。例如,在图17中,当使位于右上端部的可见光led 01a点亮时,可见光照射到图19中位于左上端部的范围t01a。另外,当点亮可见光led 06p时,可见光被照射到图19中的范围t06p。
182.另外,将从横向的左起第x个且纵向的全部区域称为范围tx。该范围tx是在上下方向上延伸的带状照射范围。例如,横向的左起第d个且纵向的第01至第10个区域被称为范围td。当使图17中的纵向可见光led 01d~10d点亮时,可见光照射范围td。另外,将从纵向的上部起第n个且横向上的所有区域称为范围tn。该范围tn是在左右方向上延伸的带状照射范围。例如,从纵向的上部数第7个且横向的第a个~第p个区域称为范围t07。当将图17中的可见光led 07a~07p点亮时,向范围t07照射可见光。在本例中,h线位于范围q06与范围q07之间。
183.控制部2101在本车辆的前方不存在其他车辆等对象物的通常状态下,将可照射范围t的整个区域设定为通常区域u,控制可见光光源2021以在该区域以规定的照度照射可见光。
184.控制器2101根据从红外线传感器2035输出的信号变更可见光配光图案。例如,当基于从红外线传感器2035输出的信号检测到其他车辆ca时,控制部2101在可照射范围t中的其他车辆ca存在的区域设定减光区域v,在不存在其他车辆ca的区域设定通常区域u。控制部2101控制可见光光源2021,以使比通常区域u低的照度的可见光照射在减光区域v上。控制部2101改变形成在可照射范围t上的可见光配光图案,使得可见光较弱地照射到检测
到其他车辆ca的区域。
185.如图19所示,控制单元2101例如将基于从红外线传感器2035输出的信号判定为存在另一车辆ca的范围td~tg设定为减光区域v,并且将其他区域设定为通常区域u。控制部2101以第一电流值向可见光led 01d~01g、02d~02g、03d~03g、04d~04g、05d~05g、06d~06g、07d~07g、08d~08g、09d~09g、10d~10g供给电流,并且以比第一电流值大的第二电流值向其他可见光led供给电流。另外,在本实施方式中,作为其他车辆ca表示了存在于本车辆前方的前行车,但不限于此。其他车辆例如也可以是对面车等。
186.本实施方式的车辆用红外线传感器内置灯具2004将从可见光光源2021射出的可见光透过红外线截止滤光片2034向第一透镜部2045a射入,并将从灯具前方经由第一透镜部2045a射入红外线截止滤光片2034的红外线向红外线传感器2035反射。根据该结构,作为使可见光投影到灯具前方的投影透镜而设置的第一透镜部2045a也可用作使红外线聚光在红外线传感器2035的聚光透镜。因此,能够削减构成车辆用红外线传感器内置灯具2004的零件的数量,因此容易将该灯具2004小型化及轻量化。因此,即使在该灯具2004上搭载红外线传感器2035,也能够抑制车辆1的大型化、重量化。
187.另外,根据车辆用红外线传感器内置灯具2004,当基于红外线传感器2035的输出信号检测到其他车辆ca时,以使可见光较弱地照射检测到其他车辆ca的区域的方式,变更在可照射范围t形成的可见光配光图案。因此,能够降低在检测到的其他车辆ca的区域照射的可见光的照度,并且能够降低向其他车辆ca的眩光感。
188.另外,根据车辆用红外线传感器内置灯具2004,设有遮光壁2046,该遮光壁2046防止从可见光光源2021射出的可见光直接射入第二透镜部2045b并且防止从红外线光源2031射出的红外线直接射入第一透镜部2045a。因此,在可见光光源2021的可见光射出时,可见光光源2021的可见光能够不从第二透镜部2045b投影,并且可通过从第一透镜部2045a投影的可见光形成任意的可见光配光图案。此外,在红外线传感器2035的光检测时,能够抑制红外线光源2031的光直接射入红外线传感器2035,并且能够提高红外线传感器2035的检测精度。
189.(变形例)
190.在上述实施方式中,说明了使用光电二极管作为红外线传感器2035的例子,但本发明不限于此。作为红外线传感器,也可以使用红外线摄像头2135。
191.图20表示在某时刻t红外线摄像头2135拍摄到的灯具前方的图像。图21表示由在时刻t+1从红外线单元2030射出的红外线形成的红外线配光图案的一例。
192.在上述实施方式中,对从红外线光源2031射出的红外线通过旋转反射器2033扫描直线状的范围q1~q3的例子(参照图18)进行了说明,但在本例中,如图21所示的照射范围x那样地在灯具前方的大范围均匀地照射红外线。例如,这样的配光可以调整旋转反射器2033的旋转速度,以高速扫描红外线,以在红外线摄像头2135的曝光时间内将红外线照射到全部范围。或者,也可以不使用旋转反射器2033,通过配置成阵列状的红外线光源2031和配置在其前方的投影透镜,在灯具前方的大范围照射红外线。
193.控制部2101在开始感测的初始状态下将照射范围x的整个区域设定为通常区域y,并且控制红外线光源2031以规定的照度向该区域照射红外线。
194.红外线摄像头2135是对从红外线光源2031射出的红外线的峰值波长具有最高的
灵敏度的摄像头。红外线摄像头2135能够取得与从红外线光源2031向灯具前方射出的红外线的反射光对应的图像。红外线摄像头2135输出与检测到的红外线的强度对应的信号。红外线摄像头2135的动作可由控制部2101控制,也可以由车辆控制部3控制。
195.从红外线单元2030射出并由灯具前方的物体反射的红外线经由第一透镜部2045a被红外线截止滤光片2034反射,并且被引导到红外线摄像头2135。红外线摄像头2135根据检测到的红外线,例如在时刻t拍摄图20所示的图像w。由红外线摄像头2135拍摄的图像w被发送到控制部2101。控制部2101判定在拍摄到的图像w中是否存在其他车辆等对象物。
196.基于在时刻t拍摄到的图像w,控制单元2101在时刻t+1,根据从红外线摄像头2135输出的信号变更照射范围x的红外线配光图案。例如,当基于从红外线摄像头2135输出的信号检测到其他车辆ca时,如图21所示,控制部2101在照射范围x中存在其他车辆ca的区域设定减光区域z,并且在不存在其他车辆ca的区域设定通常区域y。控制部2101控制红外线光源2031,以在减光区域z照射比通常区域y低的照度的红外线。控制部2101变更照射范围x的红外线配光图案,以使红外线较弱地照射检测到其他车辆ca的区域。
197.例如,在通过例如由旋转反射器2033扫描红外线向照射范围x照射红外线而构成的情况下,旋转反射器2033在成为照射减光区域z的旋转相位时,以第一电流值向红外线光源2031供给电流,并且在成为照射通常区域y的旋转相位时,以比第一电流值高的第二电流值向红外线光源2031供给电流。
198.或者,在红外线单元2030具有在基板2032上阵列状排列的红外线光源2031的情况下,以第一电流值向照射减光区域z的红外线光源2031供给电流,以第二电流值向照射通常区域y的红外线光源2031供给电流。
199.另外,在上述变形例中,在减光区域z设定有检测到其他车辆ca的区域,在通常区域y设定有该减光区域z以外的区域,但不限于此。例如,也可以将检测到其他车辆ca的区域设定为通常区域,将该通常区域以外的区域设定为强调区域。在强调区域中,以照射比照射通常区域的红外线强的红外线的方式,在照射强调区域时,以比第二电流值大的第三电流值向红外线光源2031供给电流。
200.另外,根据车辆用红外线传感器内置灯具2004,在红外线配光图案中,在存在红外线的反射强度高的其他车辆ca的区域形成减光区域z。因此,能够以弱的照度对在照射范围x内存在的其他车辆ca照射红外线,能够减弱红外线自其他车辆ca的反射强度。因此,能够抑制由从其他车辆ca反射的红外线在本车辆1的红外线摄像头2135的图像中产生光晕,能够提高其他车辆等灯具前方的物体的检测精度。
201.此外,在将检测到其他车辆ca的区域设定为通常区域,将该通常区域以外的区域设定为强调区域的构成的情况下,例如如图21所示,通过红外线摄像头2135容易地检测在其他车辆ca附近的步行者hu等红外线的反射强度低的物体。
202.另外,本发明不限于上述实施方式,可适当地自由地进行变形、改进等。除此之外,上述实施方式中的各构成要素的材质、形状、尺寸、数值、形态、数量、配置场所等只要能够达成本发明就是任意的,不作限定。
203.另外,在上述实施方式中,使用有具有二维阵列状地排列的多个可见光led作为变更从可见光光源2021射出的可见光的配光图案的装置,但不限于此。例如,也可以与图16所示的红外线单元2030同样地,使用旋转反射器来变更配光图案。
204.《第四实施方式》
205.在射出例如适于摄像头或驱动器的可见光的光源和射出适于传感器的光的光源那样地具有两种光源的传感器搭载灯具中,具有灯具大型化,向车辆的搭载性不高的不良情况。
206.本发明第四实施方式提供抑制了大型化、提高了向车辆的搭载性的光学传感器内置灯具。
207.图22是装入本发明实施方式的光学传感器内置灯具3004的车辆系统3002的框图。搭载该车辆系统3002的车辆1与上述第一实施方式相同,是能够以自动驾驶模式行驶的车辆(机动车)。如图22所示,车辆系统3002具有车辆控制部3、光学传感器内置灯具3004、传感器5、摄像头6、雷达7、hmi(human machine interface:人机界面)8、gps(global positioning system:全球定位系统)9、无线通信部10及地图信息存储部11。此外,车辆系统3002具有转向驱动器12、转向装置13、制动驱动器14、制动装置15、加速驱动器16及加速装置17。
208.光学传感器内置灯具3004是可射出可见光和红外线的灯具。光学传感器内置灯具3004是搭载在车辆1的前部的灯具(例如,头灯等)。光学传感器内置灯具3004具备控制该灯具3004的动作的控制部3101。控制部3101与车辆控制部3可通信地连接。车辆控制部3在满足了规定的条件时,生成用于控制光学传感器内置灯具3004的点亮熄灭的指示信号,并将该指示信号发送到控制部3101。控制部3101基于接收到的指示信号控制光学传感器内置灯具3004的动作。由控制部3101取得的信息以及由车辆控制部3取得的信息在相互间被接收发送。
209.摄像头(车载摄像头)6例如是包含ccd(charge-coled device:电荷收集装置)或cmos(互补型mos)等摄像元件的摄像头。摄像头6的拍摄基于从车辆控制部3发送的信号进行控制。摄像头6可基于所接收的可见光生成图像。摄像头6也可以是检测红外线的红外线摄像头。红外线摄像头可基于所接收的红外线生成图像。
210.图23是表示光学传感器内置灯具3004的内部结构的示意图。如图23所示,光学传感器内置灯具3004具有壳体3030、第一光源3031、第二光源3032、旋转反射器303(扫描部的一例)、投影透镜3034、红外线传感器3035(光学传感器的一例)、第一基板3036和第二基板3037。
211.壳体3030具有在前方侧具有开口部的主体部3030a和安装成覆盖主体部3030a的开口部的透明的外部盖3030b。在由主体部3030a和外部盖3030b形成的一个灯室3030c的内部收纳有第一光源3031、第二光源3032、旋转反射器3033、投影透镜3034、红外线传感器3035等。
212.第一光源3031射出可见光,该可见光用于驾驶员观察确认车辆1的周围,或者用于由摄像头6进行拍摄。第一光源3031由多个led(light emitting diode:发光二极管)构成。第一光源3031(在本实施方式中以下称为“可见光led 3031”)搭载在第一基板3036上。可见光led 3031的点亮熄灭由控制部3101控制。第一光源3031的详细构成在图24中后述。
213.第二光源3032射出用于感测在车辆1的前方存在的其他车辆等对象物的光。第二光源3032射出与第一光源3031射出的光的峰值波长不同的峰值波长的光。在本实施方式中,第二光源3032射出波长比可见光长的红外线。第二光源3032由ld(laser diode:激光二
极管)构成。第二光源3032(在本实施例中,以下称为“红外线ld 3032”)搭载在第二基板3037上。红外线ld3032的点亮熄灭由控制部3101控制。在红外线ld 3032的出射方向上设有准直透镜3038。准直透镜3038使从红外线ld 3032射出的红外线成为平行光。
214.第一光源3031被用作照射用于确认车辆1的前方的光的光源,因此要求照射大范围。与此相对,第二光源3032被用作照射用于检测其他车辆等对象物的光的光源,因此,要求以强的照度照射特定区域。因此,优选采用出射光的扩散程度较大的led作为第一光源3031,采用出射光的扩散程度小的ld作为第二光源3032。
215.旋转反射器3033是扫描从可见光led 3031射出的可见光和从红外线ld3032射出的红外线并向灯具前方射出的扫描装置。旋转反射器3033绕旋转轴线r旋转。旋转反射器3033具有绕旋转轴线r延伸的轴部3033a和从轴部3033a沿径向延伸的多张(在本例中为3张)板3033b(反射器的一例)。各个板的扭转角度互不相同。板3033b的表面是反射面。该反射面形成为相对于旋转轴线r的角度在周向上逐渐变化的扭转形状。
216.旋转反射器3033是将从可见光led 3031射出的可见光向灯具前方反射的部位和将从红外线ld 3032射出的红外线向灯具前方反射的部位相同的反射器(板3033b)或一体的反射体(板3033b)。旋转反射器3033的反射点设定为投影透镜3034的焦点附近。旋转反射器3033的动作由控制部3101控制。控制部3101通过控制可见光led3031以及红外线ld3032的点亮正时和旋转反射器303的旋转相位,向灯具前方的任意区域射出可见光led3031的可见光以及红外线ld3032的红外线。
217.具体地说,当从可见光led 3031射出的可见光被旋转反射器3033的反射面反射时,反射并射出的方向根据旋转反射器3033的旋转相位例如从左向右逐渐变化。另外,当从红外线ld3032射出的红外线被旋转反射器3033的反射面反射时,反射并射出的方向根据旋转反射器303的旋转相位从左向右逐渐变化。
218.投影透镜3034设置在灯室3030c内。投影透镜3034设置在外部盖3030b与旋转反射器3033之间。向投影透镜3034射入从可见光led 3031和红外线ld 3032射出并由旋转反射器303反射的光。投影透镜3034将该入射的可见光led 3031的可见光和红外线ld 3032的红外线向灯具前方投影。
219.红外线传感器3035由检测红外线的光电二极管(pd)构成。红外线传感器3035输出与检测到的红外线的强度对应的信号。红外线传感器3035在检测到的红外线的强度越高,输出信号强度越高的信号。红外线传感器3035在从红外线ld 3032射出的红外线的峰值波长上具有最高的感光灵敏度。红外线传感器3035检测从红外线ld 3032向灯具前方射出的红外线的反射光。与红外线传感器3035取得的反射光有关的信息被发送到控制部3101。红外线传感器3035的动作,例如检测红外线的感测动作等由控制部3101控制。
220.第一基板3036例如设置成搭载在第一基板3036上的可见光led 3031的出射面与旋转反射器303的板3033b相对。第一基板3036具有向可见光led 3031供电的功能。第一基板3036经由形成在第一基板3036上的供电图案向可见光led 3031供电。
221.例如,第二基板3037设置为例如搭载在第二基板3037上的红外线ld3032的出射面与旋转反射器303的板3033b相对。第二基板3037具有向红外线ld 3032供电的功能。第二基板3037经由形成在第二基板3037上的供电图案向红外线ld 3032供电。从板3033b看,第二基板30设置在第一基板3036的后方。
222.在本实施方式中,第一基板3036与第二基板3037平行地设置。
223.第一基板3036的可见光led 3031设置在比第二基板3037的红外线ld3032更靠近通过投影透镜3034的虚拟焦点f的焦点面p的位置。虚拟焦点f意味着在旋转反射器3033的板3033b折返时的投影透镜3034的焦点。焦点面p意味着通过虚拟焦点f的面中与红外线ld 3032的光轴正交的面。
224.图24是从第一基板3036的正面侧(搭载有可见光led 3031的一侧)看到的搭载有可见光led3031的第一基板3036的图。如图24所示,在本实施方式中,六个可见光led 3031设置在第一基板3036上。在第一基板3036的中央部设有空隙部3039。
225.空隙部3039贯通第一基板3036。空隙部3039设置在能够使从第二基板3037的红外线ld 3032射出的红外线向旋转反射器3033的板3033b透过的位置。空隙部3039设置在搭载于第二基板3037上的红外线ld 3032的光轴上。如图24所示,当从第二基板3037的竖直方向看第一基板3036和第二基板3037时,空隙部3039设置在经由空隙部3039可看到红外线ld 3032的位置和大小上。
226.图25是表示从本实施方式的光学传感器内置灯具3004射出的可见光及红外线的照射范围的示意图。图25所示的照射范围例如显示在设置于光学传感器内置灯具3004的25m前方的虚拟竖直屏幕上。
227.范围q01、02、03是从第一基板3036的可见光led 3031射出的可见光的照射范围,范围q01~03是驾驶员为了识别车辆1的周围,或者为了用摄像头6摄像而使用的照射范围。当点亮六个可见光led 3031时,使旋转反射器303旋转的话,则六个可见光led 3031照射可见光的区域q01a从左向右逐渐移动。
228.范围q01是从将可见光led 3031点亮后直到旋转反射器303旋转1/3为止照射可见光的范围。通过旋转反射器303的第一板反射从可见光led3031射出的可见光,并且在范围q01扫描可见光。
229.范围q02是在将可见光led 3031点亮时,在旋转反射器3033旋转1/3至2/3期间照射可见光的范围。通过旋转反射器303的第二板反射从可见光led 3031射出的可见光,并且在范围q02扫描可见光。
230.范围q03是在点亮可见光led 3031时,在旋转反射器3033旋转2/3~1圈期间可见光照射的范围。通过旋转反射器3033的第三板反射从可见光led3031射出的可见光,并且在范围q03扫描可见光。
231.范围q01~03是沿左右方向延伸的带状区域。位于最下方的范围q03优选为包含h线的区域。控制部3101通过控制可见光led 3031的点亮正时和旋转反射器3033的旋转相位,能够向灯具前方的范围q01~03的任意区域照射可见光。
232.范围q11、q12、q13是从第二基板3037的红外线ld 3032射出的红外线的照射范围。在范围q11、q12、q13,与上述的范围q01~q03同样地,根据旋转反射器3033的旋转相位,照射红外线l d3032的红外线。
233.即,范围q11是从红外线ld 3032点亮到旋转反射器3033旋转了1/3为止照射红外线的范围。通过旋转反射器3033的第一板反射从红外线ld 3032射出的红外线,并且在范围q11扫描红外线。
234.范围q12是在红外线ld 3032点亮时旋转反射器3033旋转1/3~2/3期间照射红外
线的范围。通过旋转反射器3033的第二板将从红外线ld 3032射出的红外线反射,在范围q12扫描红外线。
235.范围q13是红外线ld 3032点亮时旋转反射器3033旋转2/3~1圈期间照射红外线的范围。通过旋转反射器3033的第三板反射从红外线ld 3032射出的红外线,在范围q13扫描红外线。
236.范围q11~q13是在左右方向上延伸的直线状区域。优选的是,范围q11设置在范围q01中,范围q12设置在范围q02中,范围q13设置在范围q03中。
237.范围q11~q13的直线状区域优选在竖直方向上具有0.4度以上的上下宽度。控制部3101通过控制红外线ld 3032的点亮正时和旋转反射器3033的旋转相位,能够将红外线ld 3032的红外线照射到范围q11~q13的任意位置。
238.在灯具前方存在对面车等物体的情况下,从红外线ld 3032射出的红外线被该物体反射,通过红外线传感器3035检测高强度的反射光。在存储器中记录有旋转反射器303的旋转相位和此时射出可见光及红外线的区域的关系。控制部3101能够访问该存储器。控制部3101首先点亮红外线ld 3032使旋转反射器3033旋转,取得红外线传感器3035的输出。在红外线传感器3035输出了规定值以上的信号强度的信号时,控制部取得此时的旋转反射器3033的旋转相位,此时,确定照射了红外线的区域(位置)。控制部3101判定为在该特定的区域(位置)存在物体。控制部3101在红外线传感器3035的输出的信号强度小于规定值时,判定为在对应的区域不存在物体。
239.图26表示通过控制部3101控制可见光led 3031而得到的配光图案的一例。为了形成图26所示那样的配光图案,控制部3101如下地进行控制。
240.控制部3101例如如图26所示地判定为在作为可见光的照射范围的范围q01~03内存在其他车辆z的情况下,在包含其他车辆z的规定区域设定减光区域t,在其他区域设定通常区域s。控制部3101向可见光led3031供给第一电流值的电流,以规定的照度将可见光向通常区域s照射。控制部3101向可见光led 3031供给比第一电流值小的第二电流值的电流,向减光区域t照射照度比通常区域s低的可见光。由此,形成了不给其他车辆z赋予灰度,且明亮地照亮更大范围的观察确认性高的配光图案。
241.但是,在车辆用的灯具中,需要在车辆的前端部、后端部的右端部及左端部等拐角部等弯曲的空间,或者在格栅与引擎盖之间等狭小的空间等搭载构成灯具的多个部件。另一方面,车辆用的灯具需要将由光源、反射部件、透镜部件等构成的光学系统设计为可得到所希望的像。因此,至少在具备包括用于感测检测对象物的传感器用光源的两种光源的灯具中,需要多个光学系统,灯具容易大型化,向车辆的搭载性降低。
242.对此,本发明的光学传感器内置灯具3004构成为在搭载有照射车辆前方的可见光led 3031的第一基板3036的后方配置有搭载了对其他车辆等对象物进行感测的红外线ld 3032的第二基板3037,经由在第一基板3036上形成的空隙部3039使红外线ld3032的红外线向第一基板3036的前方透过。由此,能够将包括可见光led 3031的光学系统和包括红外线ld 3032的光学系统集成为单一的光学系统,并且能够将反射可见光led 3031的可见光的旋转反射器和投影该可见光的投影透镜3034与反射及投影红外线ld 3032的红外线的部件共用化。另外,光学传感器内置灯具3004内可由单个灯室3030c构成。因此,在具备两种光源的光学传感器内置灯具3004中,也能够抑制该灯具3004大型化,能够提高向车辆1的搭载
性。
243.此外,搭载在第一基板3036上的可见光led 3031设置在比搭载在第二基板3037上的红外线ld 3032更靠近通过投影透镜3034的虚拟焦点f的焦点面p的位置,因此,从可见光led 3031射出的可见光能够不向灯具前方扩散而照射。另外,在配置于第一基板3036的后方的第二基板3037上搭载有比可见光led 3031更难扩散的红外线ld 3032。因此,即使红外线ld 3032设置在投影透镜3034的远离焦点面p的位置,也能够不使红外线ld 3032的红外线向灯具前方扩散而照射。
244.另外,在红外线ld3032上安装有准直透镜3038,其使从红外线ld 3032射出的红外线形成为平行光。因此,能够提高从红外线ld 3032射出的红外线的指向性,并能够向特定区域照射红外线,故而能够提高红外线传感器3035的检测精度。
245.另外,本发明不限于上述实施方式,能够适当地自在地进行变形、改进等。另外,上述实施方式中的各构成要素的材质、形状、尺寸、数值、形态、数量、配置场所等只要能够达成本发明就是任意的,不进行限定。
246.在上述实施方式中,在第一基板3036的中央部形成有一个空隙部3039,在第二基板3037上搭载有一个红外线ld 3032,但不限于此。例如,也可以在第一基板3036上设置多个空隙部3039,在第一基板3036的正面看,从这些空隙部3039的各个观察确认红外线ld 3032。或者在第一基板3036的正面观看中,也可以从单一的空隙部3039观察确认多个红外线ld3032而构成。
247.另外,在上述实施方式中,第二光源3032由红外线ld构成,但不限于此。例如,第二光源3032也可以由照射红外线的led构成。
248.另外,在上述实施方式中,第一光源3031由可见光led构成,第二光源3032由红外线ld构成,但不限于此。例如,第一光源3031也可以由红外线led构成,第二光源3032也可以由在与第一光源3031射出的红外线的峰值波长不同的波长上具有峰值的红外线ld构成。在该情况下,与从红外线led向灯具前方射出的红外线的反射光对应的图像由红外线摄像头拍摄。红外线摄像头对从红外线led射出的红外线的峰值波长具有最高的灵敏度。另外,通过红外线传感器3035检测从红外线ld 3032向灯具前方射出的红外线的反射光。红外线传感器3035在从红外线ld 3032射出的红外线的峰值波长上具有最高的灵敏度。控制部3101根据从红外线传感器3035输出的信号,控制红外线led,以成为适于红外线摄像头的拍摄的配光图案。例如,控制部3101在检测到其他车辆的区域设定减光区域,能够抑制在红外线摄像头的图像中在与其他车辆相应的部位产生光晕。
249.本技术基于2019年9月19日申请的日本专利申请(特愿2019-170540)、2019年9月19日申请的日本专利申请(特愿2019-170541)、2019年10月3日申请的日本专利申请(特愿2019-183066)以及2019年10月3日申请的日本专利申请(特愿2019-183067),在此作为参照引入其内容。
250.产业上的可利用性
251.根据本发明,能够提供一种车辆用红外线灯具系统,该车辆用红外线灯具系统能够在抑制在红外线摄像头的图像上产生光晕的同时检测红外线的反射强度低的物体。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1