一种带追踪系统的智慧路灯的制作方法
1.本发明属于照明设备技术领域,具体地说,尤其涉及一种带追踪系统的智慧路灯。
背景技术:
2.在智慧城市建设发展的背景下,城市公共基础设施正普遍走向信息化、联网化、智慧安防、无线覆盖、智慧城市家居等新科技的应用,为城市生活创造了便捷、安全、绿色的环境。相对于传统路灯主要担任城市公共照明的角色,智慧路灯不仅仅用于照明,也整合了监控、通信、显示等功能于一体,智慧路灯现已成为智慧城市建设中极为重要的建设项目。目前市场上的智慧路灯大多具备识别套牌、嫌疑车辆的功能,却缺乏相应拦截功能,同时对路灯稍加改造后即可避免危化品运输车辆在运输过程中泄漏的有毒气体产生的危害。
技术实现要素:
3.本发明的目的是针对现有技术存在的不足,提供了一种拦截性强、追踪性佳、安全保障性高的带追踪系统的智慧路灯。
4.为了实现上述技术目的,本发明带追踪系统的智慧路灯采用的技术方案为:
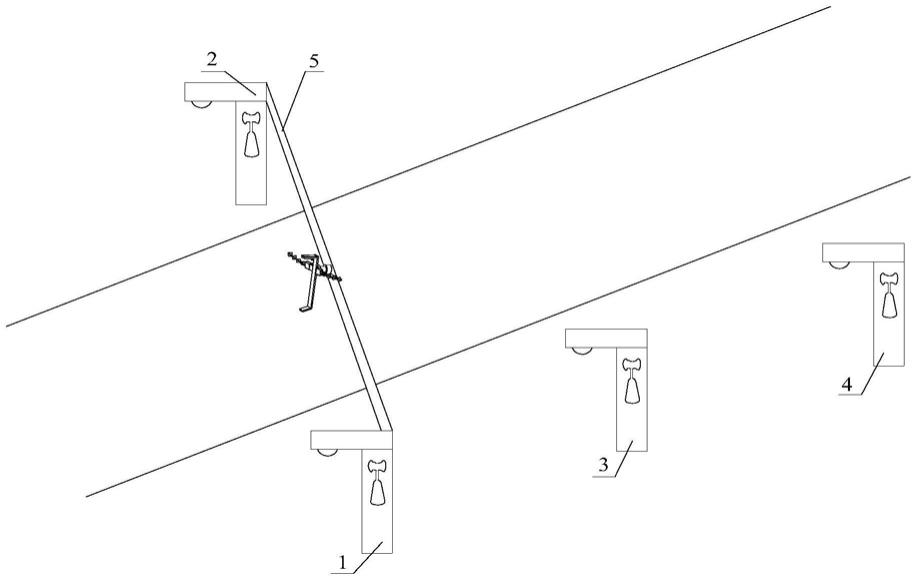
5.一种带追踪系统的智慧路灯,包括对称设于道路两侧的第一灯体、第二灯体以及与第一灯体相邻设置的第三灯体、第四灯体,所述第一灯体、第二灯体、第三灯体以及第四灯体之间设有追踪系统,所述追踪系统包括设于第一灯体上部用于监测车辆信息的监测单元、设于第一灯体和第二灯体上作出拦截动作的执行单元以及设于第三灯体和第四灯体上用于持续监测车辆信息的再监测单元;
6.所述监测单元包括设于第一灯体内的第一控制模块,所述第一控制模块上设有图像采集模块、第一定位模块、第一动态称重模块、第一通信模块以及步进电机驱动器,所述图像采集模块用于采集行驶车辆的图像特征信息,所述第一定位模块用于确定目标车辆具体的位置信息,所述第一动态称重模块用于监测目标车辆的实时重量,所述第一通信模块用于发送目标车辆的综合信息,所述步进电机驱动器用于将控制单元指令传递至步进电机,所述第一控制模块对危化品运输车辆重量生成动态走势图点1;
7.所述执行单元包括连接第一灯体和第二灯体的连接架,所述连接架表面设有经步进电机驱动的旋转盘,所述旋转盘表面固定连接有沿横向放置的u形滑架,所述u形滑架两端弯折处内侧设有电磁铁,所述电磁铁吸合有插入u形滑架内的滑行块,所述滑行块两端分别设有伸缩架,所述伸缩架包括多个首尾顺序连接的菱形架,所述多个菱形架连接点处设有三角蒺藜,中部贯穿有驱使其自由伸展收缩的伸缩杆,所述伸缩杆经置于滑行块侧部端面的液压缸控制;
8.所述再监测单元包括设于第三灯体内的第二控制模块,所述第二控制模块上连接有第二通信模块、第二定位模块、第二动态称重模块、有毒气体探测模块以及第一预警模块,所述第二通信模块用于接收并向第四灯体传递目标车辆综合信息,所述第二定位模块用于确定目标车辆即时位置,所述第二动态称重模块用于监测目标车辆的实时重量,所述
有毒气体探测模块用于检测危化品运输车辆所泄漏的有毒气体种类,所述第一预警模块用于提示防护有毒气体,所述第二控制模块对危化品运输车辆重量生成动态走势图点2,并联合走势图点1 后传递至第四灯体,所述第四灯体内设有第三控制模块,所述第三控制模块上连接有第三通信模块、第三定位模块、第三动态称重模块以及第二预警模块,所述第三通信模块用于接收目标车辆综合信息,所述第三定位模块用于确定目标车辆即时位置,所述第三动态称重模块用于监测目标车辆的实时重量,所述第二预警模块用于提示防护有毒气体,所述第三控制模块对危化品运输车辆生成动态走势图点3,并联合走势图点1和2后反馈至服务终端。
9.优选的,所述追踪系统内还包括与第四灯体相邻的至少一个联合灯体,联合灯体内设有第三控制模块,第三控制模块上连接有第三通信模块、第三定位模块、第三动态称重模块以及第二预警模块。
10.优选的,所述第三控制模块、第三通信模块、第三定位模块、第三动态称重模块以及第二预警模块个数随联合灯体个数递增。
11.优选的,所述图像采集模块用于采集图像特征信息,并与第一控制模块反馈自终端的目标车辆图像特征信息进行对比后确定指定目标。
12.优选的,所述第一定位模块、第二定位模块以及第三定位模块用于捕捉目标车辆位置信息并将信息发送至服务终端。
13.优选的,所述u形滑架侧部开设有供滑行块上下滑行的滑道。
14.优选的,所述三角蒺藜由上至下的长度逐渐增长。
15.与现有技术相比,本发明的有益效果是:
16.本发明通过在第一灯体内设置监测单元和执行单元,快速识别数据库中嫌疑车辆,并对其进行拦截,有效减轻刑侦人员工作负担;利用再监测单元对危化品运输车辆进行持续追踪,并根据生成的动态走势图对运输车辆是否发生泄漏进行判断和预警,令有毒气体发生泄漏后得到及时处理,避免群众受到有毒气体侵扰;整个追踪系统令危化品运输车辆得到多路段实时监测,为危化品的运输提供有效保障。
附图说明
17.图1是本发明的结构示意图;
18.图2是本发明中监测单元的结构图;
19.图3是本发明中执行单元的结构示意图;
20.图4是本发明中再监测单元的结构图;
21.图5是本发明中联合灯体内的结构图。
22.图中:1.第一灯体;2.第二灯体;3.第三灯体;4.第四灯体;5.连接架;6. 步进电机;7.旋转盘;8.u形滑架;9.电磁铁;10.滑行块;11.菱形架;12.三角蒺藜;13.伸缩杆;14.液压缸。
具体实施方式
23.下面结合附图和具体实施方式,对发明进一步说明:
24.如图1—图5所示,一种带追踪系统的智慧路灯,包括对称设于道路两侧的第一灯
体1、第二灯体2以及与第一灯体1相邻设置的第三灯体3、第四灯体4,所述第一灯体1、第二灯体2、第三灯体3以及第四灯体4之间设有追踪系统,所述追踪系统包括设于第一灯体1上部用于监测车辆信息的监测单元、设于第一灯体1和第二灯体2上作出拦截动作的执行单元以及设于第三灯体3和第四灯体4上用于持续监测车辆信息的再监测单元;
25.所述监测单元包括设于第一灯体1内的第一控制模块,所述第一控制模块上设有图像采集模块、第一定位模块、第一动态称重模块、第一通信模块以及步进电机驱动器,所述图像采集模块用于采集行驶车辆的图像特征信息,所述第一定位模块用于确定目标车辆具体的位置信息,所述第一动态称重模块用于监测目标车辆的实时重量,所述第一通信模块用于发送目标车辆的综合信息,所述步进电机驱动器用于将控制单元指令传递至步进电机,所述第一控制模块对危化品运输车辆重量生成动态走势图点1;
26.所述执行单元包括连接第一灯体1和第二灯体2的连接架5,所述连接架5 表面设有经步进电机6驱动的旋转盘7,所述旋转盘7表面固定连接有沿横向放置的u形滑架8,所述u形滑架8两端弯折处内侧设有电磁铁9,所述电磁铁9 吸合有插入u形滑架8内的滑行块10,所述u形滑架侧部开设有供滑行块上下滑行的滑道,所述滑行块10两端分别设有伸缩架,所述伸缩架包括多个首尾顺序连接的菱形架11,所述多个菱形架11连接点处设有三角蒺藜12,中部贯穿有驱使其自由伸展收缩的伸缩杆13,所述三角蒺藜12由上至下的长度逐渐增长,所述伸缩杆13经置于滑行块10侧部端面的液压缸14控制;
27.所述再监测单元包括设于第三灯体3内的第二控制模块,所述第二控制模块上连接有第二通信模块、第二定位模块、第二动态称重模块、有毒气体探测模块以及第一预警模块,所述第二通信模块用于接收并向第四灯体4传递目标车辆综合信息,所述第二定位模块用于确定目标车辆即时位置,所述第二动态称重模块用于监测目标车辆的实时重量,所述有毒气体探测模块用于检测危化品运输车辆所泄漏的有毒气体种类,所述第一预警模块用于提示防护有毒气体,所述第二控制模块对危化品运输车辆重量生成动态走势图点2,并联合走势图点 1后传递至第四灯体4,所述第四灯体4内设有第三控制模块,所述第三控制模块上连接有第三通信模块、第三定位模块、第三动态称重模块以及第二预警模块,所述第三通信模块用于接收目标车辆综合信息,所述第三定位模块用于确定目标车辆即时位置,所述第三动态称重模块用于监测目标车辆的实时重量,所述第二预警模块用于提示防护有毒气体,所述第三控制模块对危化品运输车辆生成动态走势图点3,并联合走势图点1和2后反馈至服务终端。
28.所述追踪系统内还包括与第四灯体相邻的至少一个联合灯体,联合灯体内设有第三控制模块,第三控制模块上连接有第三通信模块、第三定位模块、第三动态称重模块以及第二预警模块,所述第三控制模块、第三通信模块、第三定位模块、第三动态称重模块以及第二预警模块个数随联合灯体个数递增。
29.其中,所述图像采集模块用于采集图像特征信息,并与第一控制模块反馈自终端的目标车辆图像特征信息进行对比后确定指定目标,可通过摄像头采集包括人员特征(如面部特征、衣着特征),车辆特征(如车牌号、车型、颜色) 等图像特征信息;所述第一定位模块、第二定位模块以及第三定位模块用于捕捉目标车辆位置信息并将信息发送至服务终端,可通过gps或北斗定位目标车辆的具体位置信息(如经纬度、路面标记);所述第一动态称重模块、第二动态称重模块、第三动态称重模块用于实时监测目标车辆重量,可通过车轮
压力探测装置进行实时监测,并经第一控制模块、第二控制模块、第三控制模块联合生成动态走势图,便于服务终端快捷判断危化品是否泄漏以及泄漏量的确定;所述第一通信模块、第一通信模块、第一通信模块用于接收和传递目标车辆综合信息,可通过多个通信协议电路模块,如wifi、zigbee、nb
‑
iot、蓝牙等软件、硬件或软硬件集合;所述有毒气体探测模块可通过有毒气体探测器对氯气、氨气、溴化氢等有毒气体进行探测。
30.本发明工作时,第一灯体上设有监测单元,图像采集模块如摄像机,采集车辆图像特征(如人员面部特征、衣着特征、车牌号、车型、颜色等),随后与服务终端传递至第一控制模块(如mcu)处的目标信号(如套牌车辆、危化品运输车辆)对比,从而确定目标车辆,第一定位模块如gps对目标车辆进行具体地理位置定位,第一动态称重模块利用轮胎测重装置对目标车辆进行实时称重,监测信息汇总后经第一控制模块处理后生成动态位置
‑
重量走势图点1,并经第一通信模块传递至执行单元和第二通信模块;
31.若对比后目标车辆为嫌疑车辆、套牌车辆需对其进行拦截,执行单元启动,步进电机6驱使旋转盘7旋转,u形滑架8旋转,液压缸14驱使伸缩杆13伸展,多个菱形架11首尾相接伸展,关闭电磁铁9,滑行块10缺乏吸引力后由u形滑架8内滑道向下滑动,直至落于地面,菱形架11表面三角蒺藜12对车辆轮胎进行戳破拦截,防止嫌疑车辆逃离;
32.若对比后目标车辆为危化品运输车辆,再监测单元启动,第二动态称重模块对车辆进行实时称重,有毒气体探测模块如有毒气体探测器探测周围环境,判断运输车辆是否发生泄漏以及泄漏的为何种有毒气体,以便快速确定维护方案,减少人员损伤,预警模块如预警报警器发出警报,提示作出防护,第二定位模块确定目标车辆具体地理位置,检测信息经第二控制模块处理后生成动态位置
‑
重量走势图点2,并联合走势图点1形成部分整图,随后第三动态称重模块对车辆进行实时称重,第三定位模块确定目标车辆具体地理位置,信息经第三控制模块处理生成动态位置
‑
重量走势图点3,并联合走势图点1、2形成部分整图,第三通信模块将信息传递至联合灯体,以此类推,形成完整动态位置
‑
重量走势图,便于后端维护人员确定发生危化品泄漏的运输车辆的具体地理位置以及危化品泄漏量,从而快速制定适量、全面的防护救援方案,减少非必要损失,提升人员防护性。
33.综上,仅为本发明的较佳实施例而已,并非用来限定本发明实施的范围,凡依本发明权利要求范围的形状、构造、特征及精神所为的均等变化与修饰,均应包括于本发明的权利要求范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1