一种LED双色灯具的指示标志应急方法与流程
本发明涉及led双色灯具,更具体地说,本发明涉及一种led双色灯具的指示标志应急方法。
背景技术:
1、在现有技术中,自动驾驶设备通常依赖单色灯光或简单的闪光模式进行状态指示,但这种设计在多方向视觉环境中存在辨识度不足的问题,同时,大多数设备缺乏对复杂突发状况的综合响应能力,如环境干扰、信号延迟、方向偏差等,尤其是在高速或大型设备中,传统设计无法兼顾多灯具同步、应急终止操作与复杂环境适应的需求;
2、现有的单色或单模式灯光设计在恶劣环境中容易受到光线干扰和湿度影响,导致信号辨识度降低,此外大多数设备的应急终止机制设计简单,缺乏智能化决策支持,尤其是在多灯具同步配置和高复杂工况下,现有技术往往表现出响应迟缓或操作不灵活的缺点,这些缺陷限制了设备的安全性和可靠性,难以满足日益复杂的自动驾驶环境需求。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种led双色灯具的指示标志应急方法,通过双色灯光特定的闪光模式和环境适应性设计,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种led双色灯具的指示标志应急方法,包括:
3、首先准备灯具的硬件结构,将灯具的双色led光源通过透明罩保护并实现光线在水平360度分布,对灯具的底座集成电气接口;所述灯具采用黄红或黄绿双色led光源;
4、灯具包括双色灯光的闪光模式;拟定双色灯光的闪光模式以黄色为主色调,拟定警示色为红或绿;每个发光周期由主色调持续亮0.4秒,紧接着停0.25秒,紧接着警示色亮0.1秒,紧接着再停0.25秒;
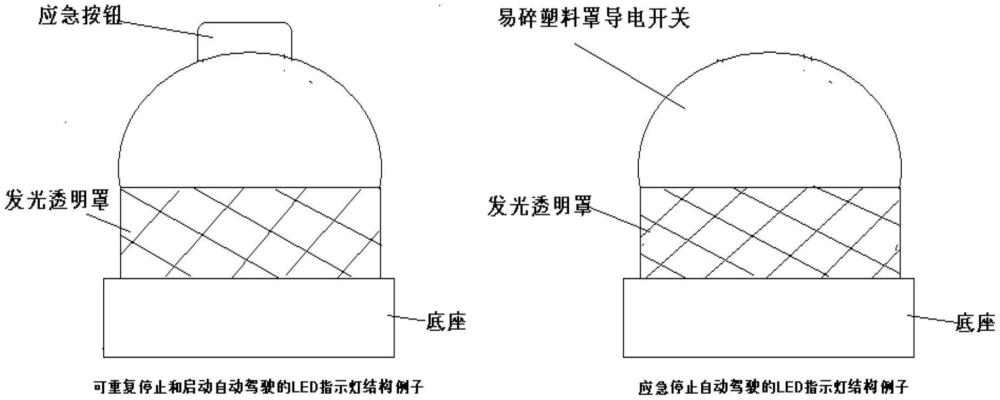
5、灯具包括应急终止模式;应急终止模式包括通过按钮式自锁开关或一次性粉碎导电开关实现,按钮式自锁开关用于低速车辆的操作;一次性粉碎导电开关通过击碎灯罩触发,用于车船的紧急情况;按钮式自锁开关或一次性粉碎导电开关,与自动驾驶控制中心串联,用于特殊状态下强制停止设备运行;
6、通过同步信号线或有线或无线或电源载波通信实现多灯间的信号一致性,使不同场景下多个灯具能够协调一致工作。
7、在一个优选的实施方式中,通过5-24v的直流电源对灯具供电,电流信号范围为0-20ma,处理逻辑电路及同步信号的发生与接收,并生成同步信号;生成的信号经过外同步冲突器及抑制器优化;确保信号一致性后输入led恒流控制电路,最终驱动led驱动板实现双色灯具的工作模式。
8、在一个优选的实施方式中,灯具的组成包括微控制器,微控制器集成有光线传感器,通过微控制器的光线传感器检测环境光强度;通过微控制器所集成的温湿度传感器监测环境湿度;
9、当环境光强度大于预设的环境光强度阈值,或环境湿度大于预设的环境湿度阈值时,判定为灯具异常状态;
10、在灯具异常状态下提示用户是否进行应急终止模式。
11、在一个优选的实施方式中,在灯具异常状态下构建应急终止提示模型,应急终止提示模型用于决定是否提示用户进行应急终止模式;
12、应急终止提示模型涉及四个因素,四个因素分别为运行速度偏差、方向偏差角度、信号延迟权重、环境干扰因子;拟定运行速度偏差指代为vdev;拟定方向偏差角度指代为δθdir;拟定信号延迟权重指代为dlatency;拟定环境干扰因子指代为ienv;
13、基于应急终止提示模型得到应急终止提示评估值,拟定应急终止提示评估值为salert;拟定预设的应急终止提示评估阈值为talert;当salert大于talert时,提示用户进入应急终止模式;否则为正常运行模式,在正常运行模式下不提示用户。
14、在一个优选的实施方式中,计算运行速度偏差vdev;
15、
16、vsafe_range=vsafe_max-vsafe_min
17、其中vreal为实时速度;vsafe_mid为安全速度的中间值;vsafe_min为安全速度的下限;vsafe_max为安全速度的上限;vsafe_range为安全速度的范围,用于表示安全速度的上下限差值。
18、在一个优选的实施方式中,计算方向偏差角度δθdir;
19、
20、其中θcurrent为设备当前行驶方向;θtarget为目标行驶方向;cos(θcurrent-θtarget)用于计算当前方向与目标方向的余弦值。
21、在一个优选的实施方式中,计算信号延迟权重dlatency
22、
23、其中τreal为当前信号的实际处理时间;τmin为信号的下限处理时间阈值;τmax为信号的上限允许处理时间阈值;用于对延迟值进行归一化。
24、在一个优选的实施方式中,计算环境干扰因子ienv;
25、
26、其中lenv为环境光强度;lmax为设备能够承受的光强度上限;henv为环境湿度;hmax表示设备能够承受的湿度值上限;表示湿度对光强干扰的放大因子。
27、在一个优选的实施方式中,基于运行速度偏差vdev、方向偏差角度δθdir、信号延迟权重dlatency、环境干扰因子ienv构建应急终止提示模型,并计算应急终止提示评估值salert;
28、
29、其中salert用于判断是否需要提示用户进入应急终止模式;w1,w2,w3,w4分别为四个因素的权重;表示运行速度偏差的立方;表示方向偏差角度的平方根;表示信号延迟权重指数;ln(1+ienv)表示环境干扰因子的非线性映射。
30、本发明的技术效果和优点:
31、1、双色led灯具的特定闪光模式有效提高了自动驾驶状态指示的识别度;通过黄色和红色(或绿色)双色led灯光以特定时间比例进行闪光组合,结合0.25秒的暗光间隔,增强了信号的视觉辨识度,并避免了长时间直视灯光造成的视觉疲劳,使得车辆或船只的无人驾驶状态在不同环境光线下能被明确感知,确保信号传递的高效性和一致性;
32、2、通过设计按钮式自锁开关和一次性粉碎导电开关,满足了低速和高速设备不同应急需求;按钮式开关便于重复操作,用于灵活的低速车辆,而粉碎式开关通过击碎灯罩触发,在紧急情况下可强制终止大型设备运行;这种双重机制在突发状况下提供了可靠的操作选择,降低了潜在的设备失控风险;
33、3、采用同步信号线、有线、无线或电源载波通信等方式,在多灯具配置场景下保证了信号的同步性,避免了多方向指示信号的不一致问题;尤其在大型设备中,主灯与副灯通过信号同步装置统一管理,可实现高效的全方向信号覆盖,提高了复杂环境下的信号协调性;
34、4、通过微控制器集成的光线和温湿度传感器,实时监测环境光强度和湿度,确保在异常环境(如高光强或高湿度条件下)设备能够根据预设阈值进入异常状态提示模式,这种主动检测机制提高了设备在恶劣环境中的适应能力,减少了外部干扰对设备功能的影响;
35、5、基于运行速度偏差、方向偏差角度、信号延迟权重和环境干扰因子构建的应急终止提示模型,实时评估设备的运行状态,并根据评分及时提示用户进入应急模式,确保在复杂工况下设备操作的安全性。
- 还没有人留言评论。精彩留言会获得点赞!