制动设备、链锯和用于保护操作者的方法与流程
[0001]
本发明涉及一种制动设备、链锯和用于保护操作者的方法。
背景技术:
[0002]
在wo2012/021752a2中已知用于链锯的制动设备,具有:至少一个传感器单元,其包括至少一个传感器元件用于感测链锯的至少一个运动特征量;至少一个制动单元用于链锯的锯链的制动和/或脱耦;至少一个操作单元用于与操作者的交互作用;和,至少一个更新单元,其设置用于,至少根据所感测的运动特征量操纵制动单元和激活操作单元的输出元件,所述输出元件向操作者输出制动单元的操纵状态。
技术实现要素:
[0003]
本发明从一种用于链锯、尤其是手引导式链锯的制动设备出发,具有:至少一个传感器单元,其包括至少一个传感器元件、尤其是陀螺仪,用于感测链锯的至少一个运动特征量,尤其是角速度和/或加速度;至少一个制动单元,用于链锯的锯链的制动和/或脱耦;至少一个操作单元,用于与操作者的交互作用;和,至少一个更新单元,其设置用于,至少根据所感测的运动特征量操纵制动单元和将操作单元的尤其是能运动的输出元件、尤其是安全性操作元件激活,所述输出元件向操作者输出制动单元的操纵状态。
[0004]
提出,更新单元设置用于,根据至少一个至少通过所感测的运动特征量求取的与链锯的锯剑板的反冲(zur
ü
ckschlagen)不同的危险状况,操纵制动单元和将输出元件激活。“设置”尤其是应理解为专门配置、专门设计和/或专门装备。对象、尤其是更新单元设置用于确定的功能,尤其是应理解为,所述对象在至少一个应用状态和/或运行状态满足和/或实施所述确定的功能。“与链锯的锯剑板的反冲不同的危险状况”尤其是应理解为在由操作者使用时链锯、尤其是锯剑板的首选不受控制的和/或意外的运动,该运动可能对操作者和/或在链锯周围环境中的其他人员造成危险并且优选与锯剑板的反冲、即所谓的kickback不同。危险状况例如构造为链锯、尤其是链锯的锯剑板从要加工的工件滑脱,链锯尤其是意外的掉落,链锯在切断工件之后的摆振(durchschwingen)、即所谓的run-through,链锯的由于外力例如由于工件或者步伐触发的运动、尤其是旋转运动,链锯的由于操作者站立失稳造成的运动等。尤其是,链锯、尤其是锯剑板在摆振时的运动至少基本上平行于链锯在加工工件期间的进给运动定向。但可设想,链锯、尤其是锯剑板在摆振的情况下尤其是由于操作者抓紧链锯的手柄元件而朝操作者的方向运动。在反冲的情况下,链锯、尤其是锯剑板尤其是朝操作者的方向、尤其是朝操作者的身体和/或头的方向运动。特别优选,与锯剑板的反冲不同的危险状况通过运动特征量,尤其是运动特征量的方向、值和/或类型,与锯剑板的反冲加以区分。例如在锯剑板反冲的情况下出现锯剑板在相对于锯剑板的取向和/或相对于锯链绕锯剑板的引导方向固定的方向上的加速度,所述方向尤其是至少基本上平行于锯剑板的主延伸平面并至少基本上垂直于锯剑板的主延伸轴线定向并且以锯剑板的主延伸轴线为出发点指向锯剑板的上侧。构件、尤其是锯剑板的“主延伸平面”,
尤其是应理解为一个平面,该平面平行于将构件刚好还完全包围的最小假想方体的最大侧面并且尤其是延伸通过该方体的中心点。构件、尤其是锯剑板的“主延伸轴线”,尤其是应理解为一轴线,该轴线平行于将构件刚好还完全包围的最小几何方体的最长的棱边。“至少基本上平行”尤其是应理解为直线或者平面、尤其是方向相对于另外的直线或者另外的平面、尤其是锯剑板的主延伸平面的(尤其是在投影平面中观察的)定向,其中,直线或者平面相对于另外的直线或者另外的平面具有的偏差尤其是小于8
°
,有利地小于5
°
和特别有利地小于2
°
。“至少基本上垂直”尤其是应理解为,直线或者平面、尤其是所述方向相对于另外的直线或者另外的平面、尤其是锯剑板的主延伸轴线的定向,其中,直线或者平面和另外的直线或者另外的平面(尤其是在投影平面中观察)围成90
°
的角度和所述角度具有的最大偏差尤其是小于8
°
,有利地小于5
°
和特别有利地小于2
°
。优选,运动特征量的设置用于识别锯剑板的反冲的至少一个反冲边界值大于运动特征量的设置用于识别与锯剑板的反冲不同的危险状况、优选识别链锯的摆振的至少一个边界值。
[0005]
优选,制动设备具有至少一个控制和/或调节单元,其配置用于,根据所感测的运动特征量求取危险状况。“控制和/或调节单元”尤其是应该理解为具有至少一个控制电子部件的单元。“控制电子部件”尤其是应理解为具有处理器单元和存储器单元以及存储在存储器单元中的运行程序的单元。“配置”尤其是应理解为专门编程、设计和/或装备。对象、尤其是控制和/或调节单元配置用于确定的功能,尤其是应理解为,所述对象在至少一个应用状态和/或运行状态中满足和/或实施所述确定的功能。优选,控制和/或调节单元配置用于将所感测的运动特征量与运动特征量的设置用于识别与锯剑板的反冲不同的危险状况的至少一个边界值比较,以求取危险状况。控制和/或调节单元尤其是配置用于,在超过运动特征量的边界值的情况下求取到至少一个危险状况。优选,控制和/或调节单元配置用于在求取到至少一个危险状况的情况下操控更新单元,用于操纵制动单元和激活输出元件。优选,控制和/或调节单元配置用于将所感测的运动特征量尤其是根据求取的危险状况定期或者连续存放在存储器单元中。优选,控制和/或调节单元和传感器单元设置用于和/或配置用于在最多65毫秒,优选最多55毫秒和特别优选最多45毫秒内,感测、求取与链锯的锯剑板的反冲不同的危险状况并操控更新单元。特别优选,在控制和/或调节单元中存放有多个边界值,其中,尤其是多个危险状况的与链锯的锯剑板的反冲不同的每个危险状况配有至少一个边界值。优选,控制和/或调节单元配置用于,根据存放的边界值和所感测的运动特征量辨识至少一个危险状况。
[0006]
优选,传感器元件例如构造为陀螺仪,加速度传感器,尤其是机械的惯性传感器,接近传感器,超声传感器,摄像机,红外传感器,电压传感器等。但可设想,传感器单元具有多于一个的传感器元件,其中,尤其是这些传感器元件构造得至少部分相互不同。优选,传感器元件至少部分布置在链锯的壳体单元内或者上和/或在锯剑板内或者上。尤其是在传感器元件作为陀螺仪的构型中,传感器元件优选布置在壳体单元内,尤其是在链锯的质心的附近区域中。尤其是在传感器元件作为加速度传感器和/或尤其是机械的惯性传感器的构型中,传感器元件优选布置在锯剑板中或者上或者在壳体单元的与锯剑板背离的一侧中或者上。在传感器元件作为摄像机,红外传感器,超声传感器,电压传感器等的构型中,传感器元件优选布置在壳体单元和/或锯剑板的至少一个侧面、尤其是外壁上,其中,尤其是传感器元件至少部分感测制动设备周围的环境。运动特征量例如构造为链锯到对象和/或外
部单元的间距,速度,绕链锯重心或者参考点的角速度,加速度,绕链锯的重心或者参考点的角加速度等。但也可设想,例如在传感器元件作为摄像机、红外传感器、超声传感器、电压传感器等的构型中,控制和/或调节单元配置用于通过借助传感器单元、尤其是传感器元件所感测的数据来求取运动特征量。替代或者附加地可设想,控制和/或调节单元配置用于把工件、链锯,尤其是锯剑板和/或链锯和/或制动设备周围的环境,尤其是借助所感测的数据区分开,用于求取链锯的运动特征量。
[0007]
优选,制动单元设置用于,在通过更新单元操纵的情况下,将链锯的锯链和/或驱动单元的驱动元件制动和/或将锯链从链锯的驱动单元脱耦。尤其是,制动单元至少部分构造为力锁合制动器或者形状锁合制动器。优选,制动单元具有至少一个制动元件,其设置用于,将驱动单元的驱动元件和/或锯链制动。制动元件例如构造为绕簧,制动带,电磁铁,卡锁元件,接触销等。可设想,制动单元包括至少一个另外的制动元件,其设置用于,至少使锯链从链锯的驱动单元脱耦。另外的制动元件例如构造为滑转离合装置,电磁铁,弹簧离合装置等。优选,制动单元设置用于,在通过更新单元操纵之后在最多60毫秒、优选最多50毫秒和特别优选最多40毫秒内将锯链停止。
[0008]
输出元件尤其是设置用于,通过至少一个触觉、声觉和/或视觉信号向操作者输出制动单元的操纵状态。输出元件优选构造为安全性操作元件,尤其是反冲杠杆、即所谓的kickback杠杆。优选,输出元件设置用于,尤其是在操纵制动单元和激活输出元件之后,在另外地或者重复地操纵输出元件的情况下将制动单元松开,其中,尤其是,锯链和/或驱动元件被释放/和/或锯链与驱动单元耦合。在输出元件作为安全性操作元件、尤其是反冲杠杆的构型中,更新单元优选设置用于,使输出元件运动到截止位置中用于输出制动单元的操纵状态。尤其是,输出元件设置用于通过输出元件布置在截止位置中而向操作者示出制动单元的操纵。优选,构造为安全性操作元件、尤其是反冲杠杆的输出元件能运动地、尤其是能枢转地支承在壳体单元上。特别优选,构造为安全性操作元件、尤其是反冲杠杆的输出元件设置用于通过从截止位置运动到至少一个基本位置中将制动单元转换到未操纵状态中和/或松开。可设想,构造为安全性操作元件、尤其是反冲杠杆的输出元件受弹簧负载地布置在壳体单元上,其中,尤其是在激活输出元件的情况下操作单元的至少一个弹簧元件被释放,其设置用于将输出元件运动到截止位置中。替代或者附加地可设想,输出元件构造为显示器,例如触摸显示器,lcd,oled等,声学输出元件,按钮等。尤其是与输出元件的构型无关地可设想,能将制动单元尤其是在操纵之后通过操作单元、尤其是输出元件复位。例如在输出元件作为显示器的构型中可设想,通过触觉、声觉和/或视觉信号向操作者输出制动单元的操纵状态,并且,能将制动单元借助输出元件通过操作者的例如触觉的输入命令转换到未操纵状态中。
[0009]
通过制动设备的根据本发明的构型能使得能实现操作者的有利地高的安全性,尤其是因为有利地能防止在与链锯的锯剑板的反冲不同的危险状况中受伤。能有利地使得能在链锯的摆振的情况下实现锯链的制动和/或脱耦。
[0010]
此外提出,制动设备包括至少一个尤其是前面提到的控制和/或调节单元,其配置用于,在超过尤其是构造为角速度的所感测的运动特征量的借助传感器单元所感测的信号的至少100度/秒、优选至少150度/秒和特别优选至少200度/秒的边界值的情况下辨识到与链锯的锯剑板的反冲不同的危险状况并且操控更新单元。尤其是构造为角速度的、所感测
的运动特征量的借助传感器单元所感测的信号的边界值尤其是为最多720度/秒,优选最多630度/秒和特别优选最多540度/秒。优选,借助传感器单元所感测的信号的边界值设置用于辨识链锯的摆振。优选,控制和/或调节单元配置用于,与所感测的角加速度的方向无关地使用借助传感器单元所感测的信号的边界值来辨识危险状况。可设想,控制和/或调节单元配置用于,在超过尤其是构造为加速度的所感测的运动特征量的借助传感器单元所感测的信号的至少2g、优选至少1.5g和特别优选至少1g的另一边界值的情况下辨识到与链锯的锯剑板的反冲不同的危险状况并且操控更新单元,其中,尤其是g=9.81m/s2是靠近地球表面的重力加速度的常数。尤其是构造为加速度的所感测的运动特征量的借助传感器单元所感测的信号的所述另一边界值尤其是为最多5g,优选最多4g和特别优选最多3g。替代或者附加地可设想,控制和/或调节单元具有运动特征量的借助传感器单元感测的信号的至少一个另外的另一边界值。尤其是,另外的另一边界值构造为运动特征量的所感测的或者所求取的微分。优选,控制和/或调节单元配置用于,将运动特征量的至少一个当前通过传感器单元感测的值与运动特征量的至少一个之前感测的值比较并将运动特征量的当前感测的值和之前感测的值的差与另外的另一边界值比较,用于辨识与链锯的锯剑板的反冲不同的危险状况。优选,控制和/或调节单元配置用于在超过所感测的运动特征量的借助传感器单元所感测的信号的另外的另一边界值的情况下辨识到与链锯的锯剑板的反冲不同的危险状况并操控更新单元。运动特征量的当前通过传感器单元感测的值的感测和运动特征量的之前感测的值的感测之间的时间间隔尤其是为最多40毫秒,优选最多20毫秒和特别优选最多10毫秒。优选,运动特征量的借助传感器单元所感测的信号的另外的另一边界值为至少100度/秒,优选至少150度/秒和特别优选至少200度/秒。可使得能实现链锯的操作者的有利地高的安全性,尤其是因为能够有利地辨识与链锯的锯剑板的反冲不同的危险状况。
[0011]
还提出,更新单元具有至少一个更新元件用于操纵制动单元和/或激活输出元件,其中,更新元件至少部分由形状记忆材料构成。“形状记忆材料”尤其是应理解为具有记忆效应的材料,其中,所述材料,尤其是在变形之后,能借助激励回复到至少一个原始形状。优选,形状记忆材料构造为形状记忆合金和/或形状记忆聚合物。尤其是,形状记忆材料能磁性地、热学地或者光学地激励。优选,更新元件具有至少两个形状状态,它们能通过磁场的改变、温度的改变或与电磁辐射的共同作用而切换。优选,由形状记忆材料构成的更新元件设置用于在至少一个第一形状状态、尤其是未激励状态中将制动单元保持在未操纵状态中。优选,由形状记忆材料构成的更新元件设置用于在至少一个第二形状状态中操纵制动单元和/或激活输出元件。在制动设备的特别优选的构型中,由形状记忆材料构成的更新元件设置用于,通过从第一形状状态过渡到第二形状状态中来操纵制动单元和激活输出元件。优选,更新元件设置用于,尤其是在通过控制和/或调节单元操控更新单元的情况下将更新单元的至少一个触发元件通过至少一个形状状态过渡来激活和/或释放。例如,更新元件的形状状态过渡构造为更新元件的收缩或者膨胀,其中,尤其是更新元件沿着更新元件的至少一个轴线的延伸尺度改变。可使得能实现制动单元的有利地快速的操纵,尤其是因为通过由形状记忆材料构成的更新元件能将为了操纵制动单元而要运动的构件的数量有利地保持小。可使得能实现有利地紧凑的更新单元。可实现更新单元的有利地小的易犯错性,尤其是因为能防止要运动的元件的卡死。
[0012]
还提出,更新单元设置用于,将输出元件以从制动单元的操纵至少机械脱耦的方
式激活和/或在制动单元的操纵之后激活。优选,更新单元构造成,使得至少一个借助更新单元施加的用于激活输出元件的力至少与借助更新单元施加的用于操纵制动单元的另一力不同。优选,输出元件和制动单元构造为尤其是在制动单元的操纵和/或输出元件的激活方面相互机械分开。优选,更新单元构造为,输出元件的激活与制动单元的操纵不同步地进行。特别优选,更新单元构造成,使得制动单元的操纵与输出元件的激活至少同时进行,优选在输出元件的激活之前进行。可设想,更新单元具有至少一个另外的更新元件,其中,所述更新元件设置用于操纵制动单元,而所述另外的更新元件设置用于将输出元件激活。尤其是,更新元件和另外的更新元件相互分开地构造。可使得能有利地快速操纵制动单元,尤其是因为能够防止制动单元的操纵的由于输出元件的激活而延迟。可使得能实现链锯的操作者的有利地高的安全性,尤其是因为链锯至锯链的完全制动为止所走过的距离能被减小。
[0013]
此外提出,更新单元包括至少一个第一触发元件和至少一个第二触发元件,其中,第一触发元件设置用于操纵制动单元,而第二触发元件设置用于将输出元件激活。尤其是,第一触发元件设置用于在通过控制和/或调节单元操控更新单元的情况下将制动单元的制动元件激活和/或以触发力加载,其中,尤其是,激活的和/或以触发力加载的制动元件设置用于将锯链和/或驱动元件制动和/或将锯链从驱动单元脱耦。优选,第二触发元件设置用于在通过控制和/或调节单元操控更新单元的情况下将操作单元的输出元件激活和/或以触发力加载,其中,尤其是,激活的和/或以触发力加载的输出元件设置用于尤其是通过输出元件的运动向操作者输出制动单元的操纵状态。优选,第一触发元件和/或第二触发元件构造为弹簧元件,其中,尤其是第一触发元件和/或第二触发元件构造为在更新单元的至少一个未激活状态中抵抗弹簧力被预紧。更新单元优选包括至少一个耦合元件,其设置用于将至少一个更新元件和第一触发元件和/或第二触发元件在更新单元的至少一个运行状态中力锁合和/或形状锁合连接。尤其是在第一触发元件和/或第二触发元件作为弹簧元件的构型中,耦合元件设置用于将第一触发元件和/或第二触发元件在更新单元的未激活状态中保持在预紧的状态中。耦合元件例如构造为杠杆,滑动件,电磁铁等。耦合元件尤其是设置用于,在尤其是通过更新元件的更新来操控更新单元的情况下,将第一触发元件和/或第二触发元件释放,其中,尤其是制动单元被操纵和输出元件被激活。优选,第一触发元件和/或第二触发元件设置用于在被耦合元件释放的情况下将所述制动元件、所述另外的制动元件、驱动元件和/或输出元件以触发力加载。但也可设想第一触发元件和/或第二触发元件的其他构型,尤其是与耦合元件无关的构型,其中,第一触发元件和/或第二触发元件例如构造为电磁铁,气动元件,液压元件,压电元件等。可使得能实现制动单元的有利地快的操纵,尤其是因为能通过输出元件的独立激活而降低更新单元操纵制动单元的时间。可使得能实现链锯的操作者的有利地高的安全性,尤其是因为链锯至锯链的完全制动为止所走过的距离能被减小。
[0014]
此外提出一种链锯、尤其是手引导式链锯,其具有至少一个根据本发明的制动设备。链锯优选包括至少一个电子单元,其中,尤其是,控制和/或调节单元构造为链锯的电子单元的一部分。优选,制动单元和/或更新单元至少绝大部分布置在链锯的壳体单元内。优选,链锯、尤其是制动设备的传感器单元具有至少一个另外的传感器元件,其设置用于感测链锯、尤其是驱动单元的至少一个运行特征量。优选,所述运行特征量例如构造为驱动单元
的驱动元件的当前或者平均转速,驱动单元的当前或者平均能量消耗,锯链的当前或者平均速度等。优选,所述另外的传感器元件布置在壳体单元和/或驱动单元内或者上。尤其是,驱动单元至少部分构造为电动马达或者内燃机。通过链锯的根据本发明的构型可使得能实现链锯的操作者的有利地高的安全性,尤其是因为能有利地防止在与链锯的锯剑板的反冲不同的危险状况中受伤。可有利地使得能实现在链锯摆振时锯链的制动和/或脱耦。
[0015]
此外提出一种用于借助至少一个制动设备、尤其是根据本发明的尤其是前面提到的制动设备保护尤其是前面提到的根据本发明的链锯的操作者的方法,其中,在至少一个方法步骤中借助制动设备的至少一个尤其是前面提到的传感器单元感测链锯的至少一个尤其是前面提到的运动特征量,尤其是角速度和/或加速度,和其中,在至少一个方法步骤中借助制动设备的至少一个尤其是前面提到的更新单元至少根据所感测的运动特征量操纵制动设备的至少一个尤其是前面提到的制动单元并将制动设备的尤其是前面提到的操作单元的至少一个尤其是能运动的尤其是前面提到的输出元件、尤其是安全性操作元件激活,所述操纵用于链锯的锯链的制动和/或脱耦,所述激活将制动单元的操纵状态输出给操作者。
[0016]
提出,在至少一个方法步骤中,根据至少一个至少通过所感测的运动特征量求取的尤其是前面提到的与链锯的锯剑板的反冲不同的危险状况,借助更新单元操纵制动单元并将输出元件激活。优选,在至少一个方法步骤中,借助制动设备的尤其是前面提到的控制和/或调节单元根据所感测的运动特征量求取与链锯的锯剑板的反冲不同的危险状况。优选,在至少一个方法步骤中,与链锯的锯剑板的反冲不同的危险状况的借助控制和/或调节单元的求取和/或链锯的运动特征量的借助传感器单元的感测定期或者连续进行。优选,与链锯的锯剑板的反冲不同的危险状况的借助控制和/或调节单元的求取通过所感测的运动特征量与运动特征量的至少一个边界值的比较来进行,其中,尤其是在所感测的运动特征量超过或者低于运动特征量的边界值时辨识到危险状况。优选,在至少一个方法步骤中,尤其是在激活输出元件和操纵制动单元之后,借助输出元件的停用、尤其是返回运动将制动单元松开。优选,在至少一个方法步骤中,在操纵制动单元的情况下,控制和/或调节单元和/或传感器单元被转换到至少一个消极状态中,其中,尤其是停止运动特征量的感测和/或危险状况的求取。尤其是,在至少一个方法步骤中,在松开制动单元的情况下,控制和/或调节单元和/或传感器单元被转换到活动状态中,其中,尤其是,运动特征量的感测和/或危险状况的求取连续或者定期进行。在特别优选构型中——其中,输出元件尤其是构造为安全性操作元件、尤其是反冲杠杆——,优选,在至少一个方法步骤中,在通过更新单元激活输出元件的情况下,使输出元件借助更新单元的触发元件、尤其是借助第二触发元件绕至少一个枢转轴线运动到截止位置中。尤其是在至少一个方法步骤中,通过借助操作者将构造为安全性操作元件、尤其是反冲杠杆的输出元件从截止位置运动到输出元件的基本位置中来进行输出元件的停用和/或返回运动。通过所述方法的根据本发明的构型可使得能实现链锯的操作者的有利地高的安全性,尤其是因为能有利地防止在与链锯的锯剑板的反冲不同的危险状况中受伤。可有利地使得能在链锯摆振时将锯链制动和/或脱耦。
[0017]
此外提出,在至少一个方法步骤中,借助更新单元将输出元件以与制动单元的操纵至少机械脱耦的方式和/或在制动单元的操纵之后激活。可使得能实现制动单元的有利地快的操纵,尤其是因为能防止制动单元的操纵由于输出元件的激活而延迟。可使得能实
现链锯的操作者的有利地高的安全性,尤其是因为链锯至锯链完全制动为止所走过的距离能被减小。
[0018]
还提出,在至少一个方法步骤中,借助制动设备的至少一个尤其是前面提到的控制和/或调节单元动态地根据所感测的运动特征量的至少一个平均走向确定至少一个尤其是前面提到的用于求取与链锯的锯剑板的反冲不同的危险状况的边界值。优选,在至少一个方法步骤中,将所感测的运动特征量借助控制和/或调节单元连续或者定期存放在控制和/或调节单元的存储器单元中,其中,尤其是借助控制和/或调节单元由至少一个所经过的时段的所存放的运动特征量确定平均走向。优选,借助控制和/或调节单元根据使用者设定、操作者、所感测的运动特征量的平均最大值、链锯的其他所感测的运动特征量和/或链锯的驱动单元的激活时长来确定所经过的时段的大小。例如借助控制和/或调节单元以与平均走向的平均值和/或最大值成比例的方式确定用于求取危险状况的边界值。尤其是在所述方法的构型——其中,所感测的运动特征量的微分被考虑为边界值——中,优选,借助控制和/或调节单元根据平均走向的方差和/或标准差确定用于求取危险状况的边界值,其中,尤其是,与平均走向的借助控制和/或调节单元求取的方差和/或标准差成比例的方式确定边界值。例如可设想,在至少一个方法步骤中,借助控制和/或调节单元将用于求取危险状况的边界值置于一值,该值相应于所感测的运动特征量的平均走向的平均值的至少20%,优选至少30%和特别优选至少40%。可使得能实现有利地高的操作者安全性,尤其是因为能有利地特定于具体状况和特定于操作者来确定用于操纵制动设备的边界值。能有利地防止制动设备由于外部影响和/或损坏而造成的故障,尤其是因为通过在确定边界值时考虑运动特征量的平均走向,使得能有利地与运动特征量的系统偏差无关地通过边界值辨识危险状况。
[0019]
还提出,在至少一个方法步骤中,借助制动设备的至少一个尤其是前面提到的控制和/或调节单元根据链锯的尤其是前面提到的壳体单元和/或锯剑板的运动确定用于求取与链锯的锯剑板的反冲不同的危险状况的至少一个边界值。优选,在至少一个方法步骤中,借助传感器单元和控制和/或调节单元通过链锯的所感测的运动特征量,尤其是通过链锯的多个所感测的运动特征量,尤其是在加工工件期间计算和/或求取壳体单元和/或锯剑板的运动。尤其是,借助控制和/或调节单元根据壳体单元和/或锯剑板的尤其是在加工工件期间的运动确定链锯的加工过程。优选,借助控制和/或调节单元根据壳体单元和/或锯剑板的尤其是在加工工件期间的运动和/或根据链锯的所确定的加工过程来辨识可能的与链锯的锯剑板的反冲不同的危险状况。特别优选,借助控制和/或调节单元根据所辨识的可能的危险状况确定用于求取与链锯的锯剑板的反冲不同的危险状况的边界值。例如,当通过传感器单元和控制和/或调节单元求取到链锯朝地面方向竖直切割时,将用于求取危险状况的边界值沿链锯的进给方向这样适配,使得在链锯摆振时、尤其是在工件屈服的情况下操纵制动单元,其中,尤其是确定沿与进给方向不同的方向的用于求取危险状况的另一边界值。优选,在至少一个方法步骤中,借助控制和/或调节单元,根据所感测的运动特征量、尤其是锯剑板的速度和/或根据链锯的操纵元件的操纵来确定进给运动的方向。链锯的操纵元件尤其是设置用于,控制和/或调节链锯的驱动单元。可设想,在至少一个方法步骤中,借助控制和/或调节单元根据所感测的运动特征量和/或壳体单元和/或锯剑板的尤其是在加工工件期间的运动建立至少一个尤其是动态的链锯虚拟模型,其中,尤其是链锯虚
拟模型被考虑用于辨识可能的危险状况和/或与链锯的锯剑板的反冲不同的危险状况。优选,借助控制和/或调节单元和/或通信单元尤其是经由外部单元存放所建立的尤其是在辨识到危险状况的情况下的链锯虚拟模型,尤其是用于重构在危险状况中的方法流程。可设想,链锯的至少通过所感测的运动特征量求取的所感测的运动在虚拟模型中被考虑。替代或者附加地可设想,在至少一个方法步骤中通过操作单元向操作者输出虚拟模型。可使得能实现有利地高的操作者安全性,尤其是因为用于操纵制动设备的边界值能有利地特定于具体情况和特定于操作者被确定。可使得能实现有利地高的链锯操作方便性。可使得能根据链锯在运行期间的运动适配边界值,由此尤其是可防止制动单元的不必要的和/或非期望的操纵。
[0020]
此外提出,在至少一个方法步骤中,借助制动设备的至少一个控制和/或调节单元通过机器学习方法求取用于求取与链锯的锯剑板的反冲不同的危险状况的至少一个边界值。优选,在机器学习方法中,借助控制和/或调节单元和/或借助至少一个外部单元,尤其是服务器、计算中心和/或由多个链锯组成的网络,将存放的多个数据,尤其是运动特征量、运行特征量和/或求取的危险状况考虑用于边界值的适配。尤其是在机器学习方法中,借助控制和/或调节单元和/或借助至少外部单元,将针对链锯的多次、尤其是至少10次、优选至少50次和特别优选至少100次切割所感测的运动特征量、尤其是所感测的运动特征量的平均走向考虑用于边界值的适配。优选,借助控制和/或调节单元通过所感测的运动特征量、尤其是所感测的运动特征量的平均走向和/或所感测的运行特征量限定和/或识别链锯的切割。优选,机器学习方法通过用于辨识至少一个危险状况的至少一个算法进行,其中,所述算法配置用于,借助至少一个所感测的运动特征量、尤其是所感测的运动特征量的平均走向辨识危险状况和/或适配边界值。优选,借助控制和/或调节单元给机器学习方法预给定至少一个尤其是前面提到的边界值,其中,所述算法尤其是设置用于将边界值优选连续适配。优选,机器学习方法随着链锯的运行而连续进行。可设想,在至少一个方法步骤中,借助控制和/或调节单元通过至少一个分簇方法,将数据、尤其是至少一个所感测的运动特征量、至少一个运动特征量的平均走向和/或至少一个所感测的运行特征量分成多个组,以辨识危险状况,其中,每个组配有运动特征量的至少一个特征样式和/或运动特征量的走向。例如,这些组借助控制和/或调节单元和/或借助操作者,尤其是通过操作单元的至少一个操作元件,根据操作者、要加工的工件、所用的锯链的类型和/或锯链的使用时长或者用旧程度划分。尤其是借助控制和/或调节单元、尤其是借助算法对于每个组确定不同的用于求取危险状况的边界值。优选,组的划分和/或到其中一个组的分配借助控制和/或调节单元定期、连续或者在链锯运行开始时进行。尤其是在至少一个方法步骤中,借助控制和/或调节单元尤其是通过传感器单元根据所感测的运动特征量、所感测的运动特征量的平均走向、操作者输入和/或所感测的运行特征量进行组的分配。例如,链锯的不同的操作者根据所感测的运动特征量的平均走向的特征样式被划分到不同的组中,其中,尤其是根据链锯的当前操作者的组借助控制和/或调节单元适配边界值。替代或者附加地,例如将不同类型的锯链——尤其是在锯链的锐利度和/或锯链的形状方面不同——分成不同的组,其中,尤其是根据当前紧固在链锯上的锯链的组借助控制和/或调节单元适配边界值。可设想,制动设备、尤其是控制和/或调节单元具有至少一个学习模式,其中,尤其是在学习模式中借助机器学习方法来进行边界值的确定。优选,在至少一个方法步骤中,根据所感测的运动特征
量和/或使用者输入,尤其是借助操作元件激活和/或停用学习模式。优选,在至少一个方法步骤中,在学习模式中,操作者在操纵制动单元期间或者之后通过输出元件和/或操作元件查验制动设备的功能,其中,尤其是检查求取的危险状况、尤其是制动单元的操纵的正确性。例如借助控制和/或调节单元在感测到输出元件和/或操作元件的预给定操纵样式的情况下由操作者识别到求取的危险状况、尤其是制动单元的操纵的正确性。替代或者附加地可设想,借助控制和/或调节单元根据输出元件和/或操作元件的操纵时长评价求取的危险状况、尤其是制动单元的操纵的正确性,其中,例如在操纵制动单元之后在借助控制和/或调节单元和/或传感器单元所感测的、输出元件和/或操作元件的操纵暂停的时段少于3秒,优选少于2秒和特别优选少于1秒的情况下,识别到错误辨识的危险状况和/或制动单元的非期望的操纵。尤其是在至少一个方法步骤中在学习模式中借助控制和/或调节单元根据所查验的功能适配算法和/或用于求取危险状况的边界值。优选,机器学习方法在学习模式中作为主动学习方法或者加强学习方法进行。替代或者附加地可设想,在至少一个方法步骤中,借助链锯、尤其是制动设备的至少一个通信单元将电子数据、尤其是所感测的运动特征量、所感测的运行特征量、算法等传递给外部单元,和/或,尤其是设置用于在机器学习方法中使用的电子数据,尤其是运动特征量、运动特征量的走向、运行特征量和/或算法的值被外部单元接收。尤其是在至少一个方法步骤中,通过通信单元接收的尤其是设置用于在机器学习方法中使用的电子数据借助控制和/或调节单元被考虑用于求取边界值和/或适配算法。可使得能实现有利地高的链锯操作方便性,尤其是因为用于确定危险状况的边界值适配于链锯的操作者的表现和/或工作过程。可通过制动设备尤其是在没有危险状况的情况下有利地防止非期望地操纵制动单元。可使得能实现链锯的操作者的有利地高的安全性,尤其是因为制动设备能适配于操作者的工作表现。
[0021]
还提出,在至少一个方法步骤中,借助制动设备的至少一个尤其是前面提到的控制和/或调节单元根据链锯的至少一个尤其是前面提到的运行特征量、尤其是链锯的驱动单元或者锯链的转速来确定用于求取与链锯的锯剑板的反冲不同的危险状况的至少一个边界值。优选,在至少一个方法步骤中,借助传感器单元的至少一个尤其是前面提到的另外的传感器元件尤其是定期或者连续感测运行特征量。优选,在至少一个方法步骤中,借助控制和/或调节单元根据运行特征量确定链锯的壳体单元和/或锯剑板的运动。例如借助控制和/或调节单元根据运行特征量求取锯链与工件的接触。尤其是在至少一个方法步骤中借助控制和/或调节单元根据运行特征量和至少一个所感测的运动特征量求取链锯的进给方向。可设想,在机器学习方法中运行特征量被考虑用于感测锯链的类型或者锯链的用旧、用于确定链锯的操作者和/或用于求取工件的类型。例如可设想,借助控制和/或调节单元,在机器学习方法中,通过在切过工件时驱动单元的转速、通过锯剑板沿进给方向的速度和通过对借助传感器单元感测的工件数据、例如图像的分析评价来求取工件的类型。例如可设想,借助控制和/或调节单元,通过在至少一个时段内在链锯切过工件时驱动单元的转速的走向和/或锯剑板的进给运动的速度的走向确定锯链的用旧。可设想,在至少一个方法步骤中,借助控制和/或调节单元根据运行特征量进行与链锯的锯剑板的反冲不同的危险状况的辨识,其中,尤其是在超过运行特征量边界值的情况下适配边界值。例如在驱动单元的转速单调递增时,将用于求取危险状况的边界值借助控制和/或调节单元适配,尤其是以便能够优选在当前进给运动的方向上辨识链锯的摆振。可使得能有利地精确地辨识危险状况,
尤其是因为通过运行特征量能有利地监控链锯的锯切过程。能实现有利地高的链锯操作方便性,尤其是因为能通过制动设备防止不必要地和/或非期望地操纵制动单元。
[0022]
还提出,在至少一个方法步骤中,借助制动设备的至少一个尤其是前面提到的控制和/或调节单元根据通过操作者尤其是借助制动设备的操作单元执行的设定来确定用于求取与链锯的锯剑板的反冲不同的危险状况的至少一个边界值。优选在至少一个方法步骤中对操作者借助所述操作元件、输出元件和/或操作单元的另外的操作元件进行的设定进行选择。优选在至少一个方法步骤中,尤其是借助控制和/或调节单元给每个可能的设定配属至少一个用于求取危险状况的边界值。优选,不同的可能的设定分别具有配属于运动特征量的用于求取危险状况的边界值的不同值。可设想,设定、尤其是配属给所述设定的边界值构造成,使得在尤其按通过操作单元预给定的设定顺序通过操作者切换这些设定时,将用于求取危险状况的边界值逐步提高。尤其是,所述设定构造为制动设备的敏感度设定。尤其是在所述方法的构型——其中,用于求取危险状况的边界值的求取通过机器学习方法进行——中,可设想,在至少一个方法步骤中借助控制和/或调节单元通过算法来适配配属给这些设定的至少一个、尤其是所有的边界值。可使得能有利地简单和快速地将制动设备适配于操作者需求。可使得能实现链锯的操作者的有利地高的安全性,尤其是因为制动设备能适配于操作者的工作行为。
[0023]
根据本发明的制动设备,根据本发明的链锯和/或根据本发明的方法在此不应局限于所述的应用和实施方式。根据本发明的制动设备、根据本发明的链锯和/或根据本发明的方法尤其是能为了满足在此所述的工作方式而具有与提到的数量不同数量的各个元件、构件和单元以及方法步骤。此外,在公开文件中给出的值范围方面,在提到的边界内的值也应视为被公开并且可任意使用。
附图说明
[0024]
另外的优点由后面的附图描述得到。在附图中示出本发明的四个实施例。附图、说明书和权利要求书包含多个特征的组合。本领域技术人员可将这些特征适宜地单独看待并且概括成有意义的其他组合。
[0025]
附图示出:
[0026]
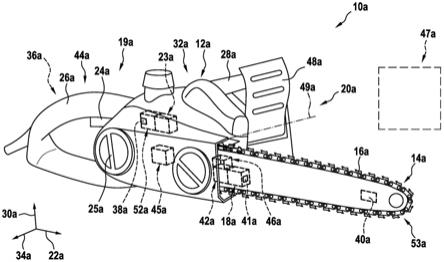
图1根据本发明的链锯的示意图,其具有根据本发明的制动设备,
[0027]
图2以示意图在制动设备的更新单元的区域中示出根据本发明的制动设备的细节图,带有更新单元的两个触发元件,
[0028]
图3根据本发明的用于借助根据本发明的制动设备保护根据本发明的链锯的操作者的方法的流程的示意图,
[0029]
图4借助根据本发明的制动设备的传感器单元所感测的构造为角速度的运动特征量的示例性走向的示意图,用于求取在根据本发明的链锯的摆振的情况下的危险状况,
[0030]
图5借助根据本发明的制动设备的传感器单元所感测的构造为角速度的运动特征量的示例性走向的示意图,用于求取在根据本发明的链锯的摆振的情况下和在链锯的锯剑板的反冲的情况下的危险状况,
[0031]
图6根据本发明的制动设备的第一替代构型的更新单元和制动单元的示意图,带有更新单元的一个触发元件,
[0032]
图7以示意图在制动设备的更新单元的区域中示出根据本发明的制动设备的第二替代构型的细节图,带有更新单元的一个触发元件,和
[0033]
图8以示意图在制动设备的更新单元的区域中示出根据本发明的制动设备的第三替代构型的细节图,带有更新单元的两个更新元件。
具体实施方式
[0034]
图1示出尤其是手引导式的链锯10a,其具有壳体单元12a、锯剑板14a、绕着锯剑板14a张紧的锯链16a、驱动单元18a、操纵单元19a和制动设备20a。驱动单元18a和制动设备20a布置在壳体单元12a内。锯剑板14a紧固在壳体单元12a和驱动单元18a上并且尤其是构造成能更换的。尤其是,驱动单元18a至少部分构造为电动马达或者内燃机。锯剑板14a从壳体单元12a沿x方向22a延伸。锯链16a通过锯剑板14a引导并且能借助驱动单元18a驱动。链锯10a包括电子单元23a。操纵单元19a包括操纵元件24a,链锯10a的操作者能通过所述操纵元件操纵电子单元23a,用于控制和/或调节驱动单元18a。操纵元件24a布置在壳体单元12a的手柄元件26a上。壳体单元12a包括另一手柄元件28a,其布置在壳体单元12a的沿y方向30a定向的上侧32a上,其中,另一手柄元件28a具有纵长轴线,所述纵长轴线至少基本上平行于z方向34a延伸。尤其是,x方向22a、y方向30a和z方向34a类似于笛卡尔坐标系的轴来相对彼此布置。x方向22a、y方向30a和z方向34a构造为向量并且具有相同的位置向量。优选,x方向22a、y方向30a和z方向34a这样布置,使得x方向22a、y方向30a和z方向34a分别相互成90
°
的角度。优选,x方向22a至少基本上平行于锯剑板14a的主延伸轴线延伸。制动设备20a包括传感器单元36a,所述传感器单元36a具有构造为陀螺仪的传感器元件38a和构造为加速度传感器的另一传感器元件40a,用于感测链锯10a的运动特征量。尤其是,传感器元件38a设置用于感测链锯10a的构造为角速度的运动特征量。优选,所述另一传感器元件40a设置用于感测链锯10a的构造为加速度的运动特征量。但也可设想传感器单元36a、尤其是传感器元件38a和/或所述另一传感器元件40a的其他构型,例如构型为尤其是机械的惯性传感器、接近传感器、超声传感器、摄像机、红外传感器、电压传感器等。制动设备20a包括用于链锯10a的锯链16a的制动和/或脱耦的制动单元42a和用于与操作者交互作用的操作单元44a,其中,操作单元44a具有操作元件25a。制动设备20a包括通信单元45a用于与外部单元47a、尤其是服务器、云或者其他链锯10a进行尤其是无线的数据传递。制动设备20a包括更新单元46a,其设置用于,至少根据所感测的运动特征量操纵制动单元42a和将操作单元44a的构造为安全性操作元件、尤其是反冲杠杆的能运动的输出元件48a激活,所述输出元件向操作者输出制动单元42a的操纵状态。更新单元46a设置用于,根据至少一个至少通过所感测的运动特征量求取的危险状况操纵制动单元42a和将输出元件48a激活,所述危险状况与链锯10a的锯剑板14a的反冲不同。
[0035]
输出元件48a能枢转地支承在壳体单元12a上并将另一手柄元件28a沿逆着x方向22a定向的方向的至少绝大部分遮盖。输出元件48a的支承轴线49a至少基本上平行于另一手柄元件28a、尤其是另一手柄元件28a的纵长轴线布置。输出元件48a设置用于,通过至少光学的信号、尤其是通过输出元件48a到截止位置中的运动向操作者输出制动单元42a的操纵状态。输出元件48a设置用于,尤其是在操纵制动单元42a和激活输出元件48a之后,在另外地或者重复地操纵输出元件48a、尤其是在将输出元件48a从截止位置运动到基本位置
(如图1所示)的情况下将制动单元42a松开,其中,尤其是,锯链16a和/或驱动单元18a的驱动元件50a被释放和/或锯链16a与驱动单元18a耦合。尤其是,输出元件48a设置用于,在通过更新单元46a激活输出元件48a的情况下绕支承轴线49a、尤其是绕沿着z方向34a延伸的轴线枢转到截止位置中。更新单元46a设置用于将输出元件48a运动到截止位置中,以输出制动单元42a的操纵状态。输出元件48a受弹簧负载地布置在壳体单元12a上,其中,尤其是在激活输出元件48a的情况下输出元件48a运动到截止位置中。但也可设想输出元件48a的其他构型,尤其是构型为显示器、例如触摸显示器、lcd、oled等、声学输出元件、按钮等,其中,尤其是通过触觉的、视觉的和/或声觉的信号向操作者输出制动单元42a的操纵状态。
[0036]
尤其是,与链锯10a的锯剑板14a的反冲不同的危险状况构造为链锯10a、尤其是链锯10a的锯剑板14a从要加工的工件(尤其是在图1中未示出)滑脱,链锯10a掉落,链锯10a在切断工件之后摆振、即所谓的run-through,链锯10a的由于外力、例如由于工件或者步伐触发的运动、尤其是旋转运动,链锯10a由于操作者站立失稳而运动等。尤其是,链锯10a、尤其是锯剑板14a与锯链16a在锯剑板14a反冲的情况下沿y方向30a和/或绕至少基本上平行于z方向34a定向的轴线加速。尤其是在链锯10a摆振的情况下出现链锯10a、尤其是锯剑板14a沿链锯10a的进给方向、优选沿着至少基本上平行于y方向30a定向的轴线和/或绕着至少基本上平行于z方向34a定向的轴线的加速。例如在链锯10a掉落的情况下,根据链锯10a的先前的取向而定,出现链锯10a沿至少一个方向的加速。优选,运动特征量的设置用于识别锯剑板14a的反冲的至少一个反冲边界值大于运动特征量的设置用于识别与锯剑板14a的反冲不同的危险状况、优选识别链锯10a的摆振的至少一个边界值。
[0037]
传感器元件38a布置在链锯10a的壳体单元12a内,尤其是链锯10a的质心和/或电子单元23a的附近区域中。另一传感器元件40a布置在锯剑板14a上,尤其是在链锯10a的与壳体单元12a背离的端部区域53a中。制动设备20a的传感器单元36a具有又一传感器元件41a,其设置用于感测链锯10a、尤其是驱动单元18a的至少一个运行特征量。优选,该运行特征量例如构造为驱动单元18a的当前或者平均转速、当前或者平均能量消耗,锯链16a的当前或者平均速度等。又一传感器元件41a在壳体单元12a内在驱动单元18a上布置。但也可设想传感器元件38a,40a,41a的其他布置方式,例如在手柄元件26a,28a中的一个手柄元件内或上。但也可设想传感器单元36a的其他构型,其中,尤其是传感器单元36a具有与三个不同的数量的传感器元件38a,40a,41a,例如仅仅一个传感器元件38a用于感测运动特征量。
[0038]
图2中示意性地以细节图示出链锯10a的制动设备20a。制动设备20a包括控制和/或调节单元52a,其尤其是构造为链锯10a的电子单元23a的一部分。传感器单元36a与控制和/或调节单元52a电连接。控制和/或调节单元52a配置用于,根据所感测的运动特征量求取危险状况。控制和/或调节单元52a尤其是配置用于,将所感测的运动特征量与运动特征量的设置用于识别与锯剑板14a的反冲不同的危险状况的至少一个边界值比较,以求取危险状况。尤其是,控制和/或调节单元52a配置用于,在超过运动特征量的边界值的情况下求取到至少一个危险状况。优选,控制和/或调节单元52a配置用于,在求取到至少一个危险状况的情况下操控更新单元46a,用于操纵制动单元42a和激活输出元件48a。优选,控制和/或调节单元52a配置用于,将所感测的运动特征量,尤其是根据求取的危险状况,定期或者连续存放在控制和/或调节单元52a的存储器单元72a中。优选,控制和/或调节单元52a和传感器单元36a设置和/或配置用于在最多45毫秒内感测、求取与链锯10a的锯剑板14a的反冲不
同的危险状况和操控更新单元46a。特别优选,在控制和/或调节单元52a中存放有多个边界值,其中,尤其是,多种危险状况中的与链锯10a的锯剑板14a的反冲不同的每种危险状况配属有至少一个边界值。优选,控制和/或调节单元52a配置用于,根据存放的边界值和所感测的运动特征量辨识至少一个危险状况。
[0039]
制动单元42a设置用于,在通过更新单元46a操纵的情况下,将锯链16a和/或链锯10a的驱动单元18a的驱动元件50a制动和/或将锯链16a从链锯10a的驱动单元18a脱耦。制动单元42a至少部分构造为形状锁合制动器,其中,尤其是在操纵制动单元42a的情况下制动单元42a的制动元件54a形状锁合和力锁合地作用在驱动元件50a上。制动元件54a设置用于,将驱动单元18a的驱动元件50a和锯链16a制动。制动元件54a构造为接触销。但也可设想,制动元件54a的其他构型,例如构型为绕簧、制动带、电磁铁、卡锁元件等。优选,制动单元42a设置用于在通过更新单元46a操纵制动单元42a之后在最多40毫秒内将锯链16a停止。
[0040]
控制和/或调节单元52a配置用于在超过尤其是构造为角速度的所感测的运动特征量的借助传感器单元36a所感测的信号的至少200度/秒的边界值的情况下辨识到与链锯10a的锯剑板14a的反冲不同的危险状况并操控更新单元46a。尤其是构造为角速度的所感测的运动特征量的借助传感器单元36a所感测的信号的边界值尤其是为最多540度/秒。优选,借助传感器单元36a所感测的信号的边界值设置用于辨识链锯10a的摆振。控制和/或调节单元52a配置用于,与所感测的角加速度的方向无关地将借助传感器单元36a所感测的信号的边界值用于辨识危险状况。控制和/或调节单元52a配置用于,在超过尤其是构造为加速度的所感测的运动特征量的借助传感器单元36a所感测的信号的至少1g的另一边界值的情况下辨识到与链锯10a的锯剑板14a的反冲不同的危险状况并且操控更新单元46a,其中,尤其是,g=9.81m/s2是靠近地球表面的重力加速度常数。尤其是构造为加速度的所感测的运动特征量的借助传感器单元36a所感测的信号的所述另一边界值为最多3g。
[0041]
更新单元46a具有更新元件56a,用于操纵制动单元42a和激活输出元件48a,其中,更新元件56a至少部分由形状记忆材料构成。所述形状记忆材料构造为形状记忆合金。但也可设想,形状记忆材料构造为形状记忆聚合物。更新元件56a设置用于,在更新元件56a的至少一个第一形状状态、尤其是未激励状态中将制动单元42a保持在未操纵状态中。更新元件56a设置用于,通过从第一形状状态过渡到第二形状状态来操纵制动单元42a和将输出元件48a激活。制动设备20a包括第一触发元件58a和第二触发元件64a。更新单元46a设置用于,将输出元件48a以与制动单元42a的操纵机械脱耦的方式激活。更新单元46a构造成,使得至少一个借助更新单元46a施加的用于激活输出元件48a的力与借助更新单元46a施加的用于操纵制动单元42a的另一力不同。输出元件48a和制动单元42a构造为,尤其是在制动单元42a的操纵和/或输出元件48a的激活方面,相互机械分开。更新单元46a构造为,使得制动单元42a的操纵至少基本上与输出元件48a的激活在同时进行。
[0042]
更新元件56a设置用于,尤其是在通过控制和/或调节单元52a操控更新单元46a的情况下,通过至少一个形状状态过渡将更新单元46a的第一触发元件58a和第二触发元件64a激活和/或释放。更新元件56a与控制和/或调节单元52a电连接。尤其是,控制和/或调节单元52a配置用于,在操控更新单元46a的情况下将更新元件56a以电信号激励。但也可设想控制和/或调节单元52a和/或更新元件56a的其他构型。
[0043]
更新单元46a包括耦合元件60a,耦合元件设置用于将更新元件56a与第一触发元
件58a和第二触发元件64a在更新单元46a的至少一个运行状态中力锁合和/或形状锁合连接。尤其是,更新元件56a在通过控制和/或调节单元52a激励的情况下至少沿着更新元件56a的纵长轴线收缩,其中,尤其是,与更新元件56a连接的耦合元件60a运动。第一触发元件58a设置用于,在通过制动设备20a的控制和/或调节单元52a操控更新单元46a的情况下操纵制动单元42a、尤其是制动单元42a的制动元件54a,并且,第二触发元件64a设置用于将输出元件48a激活。尤其是,激活的和/或以触发力加载的制动元件54a设置用于,将链锯10a的锯链16a和/或驱动单元18a的驱动元件50a制动和/或将锯链16a从驱动单元18a脱耦。优选,第二触发元件64a设置用于,在通过控制和/或调节单元52a操控更新单元46a的情况下将操作单元44a的输出元件48a激活和/或以触发力加载,其中,尤其是,激活的和/或以触发力加载的输出元件48a设置用于尤其是通过输出元件48a的运动向操作者输出制动单元42a的操纵状态。第一触发元件58a和第二触发元件64a构造为弹簧元件。第一触发元件58a和第二触发元件64a在更新单元46a的至少一个未激活状态中经由更新单元46a的耦合元件60a抵抗弹簧力被预紧。耦合元件60a构造为滑动件。耦合元件60a设置用于,在操控更新单元46a的情况下,尤其是通过更新元件56a的更新,将第一触发元件58a和第二触发元件64a释放,其中,尤其是制动单元42a被操纵和输出元件48a被激活。但也可设想第一触发元件58a和/或第二触发元件64a的其他构型,尤其是与耦合元件60a无关的其他构型,其中,尤其是,第一触发元件58a和/或第二触发元件64a例如构造为电磁铁、气动元件、液压元件、压电元件等。
[0044]
图3示出用于借助链锯10a的制动设备20a保护链锯10a、尤其是手引导式链锯10a的操作者的方法100a的流程。在方法100a的至少一个方法步骤102a中,借助制动设备20a的传感器单元36a感测链锯10a的至少一个运动特征量。优选在方法100a的至少一个方法步骤、尤其是在方法步骤102a中,借助传感器单元36a连续感测链锯10a的运动特征量。优选在方法100a的至少一个方法步骤、尤其是在方法步骤102a中,借助传感器单元36a的又一传感器元件41a定期或者连续感测链锯10a的运行特征量,尤其是链锯10a的驱动单元18a或者锯链16a的转速。
[0045]
优选在方法100a的至少一个另外的方法步骤104a中,借助控制和/或调节单元52a通过将所感测的运动特征量与运动特征量的至少一个边界值比较来求取与链锯10a的锯剑板14a的反冲不同的危险状况,其中,尤其是在所感测的运动特征量超过或者低于运动特征量的边界值的情况下辨识到危险状况。在方法100a的至少一个另外的方法步骤105a中,借助制动设备20a的控制和/或调节单元52a动态地根据所感测的运动特征量的至少一个平均走向来确定用于求取与链锯10a的锯剑板14a的反冲不同的危险状况的至少一个边界值。尤其是,与链锯10a的锯剑板14a的反冲不同的危险状况的求取借助控制和/或调节单元52a连续进行。在方法100a的至少一个方法步骤、尤其是方法步骤105a中,将所感测的运动特征量借助控制和/或调节单元52a连续或者定期地存放在控制和/或调节单元52a的存储器单元72a中,其中,尤其是借助控制和/或调节单元52a由至少一个所经过的时段的所存放的运动特征量确定平均走向。优选,借助控制和/或调节单元52a根据使用者设定、操作者、所感测的运动特征量的平均最大值、链锯10a的所感测的其他运动特征量和/或链锯10a的驱动单元18a的激活时长来确定所经过的时段的大小。例如,借助控制和/或调节单元52与平均走向的平均值和/或最大值成比例地确定用于求取危险状况的边界值。在方法100a的至少一个方法步骤、尤其是方法步骤105a中,借助控制和/或调节单元52a将用于求取危险状况的
边界值置于一值,所述值相应于所感测的运动特征量的平均走向的平均值的40%。
[0046]
在方法100a的至少一个另外的方法步骤106a中,借助传感器单元36a和控制和/或调节单元52a通过链锯10a的所感测的运动特征量、尤其是链锯10a的多个所感测的运动特征量,计算和/或求取壳体单元12a和/或锯剑板14a的尤其是在加工工件期间的运动。尤其是在方法步骤106a中,借助控制和/或调节单元52a根据壳体单元12a和/或锯剑板14a的尤其是在加工工件期间的运动确定链锯10a的加工过程。优选在方法步骤106a中,借助控制和/或调节单元52a根据壳体单元12a和/或锯剑板14a的尤其是在加工工件期间的运动和/或根据链锯10a的所确定的加工过程来辨识可能的与链锯10a的锯剑板14a的反冲不同的危险状况。优选,在方法100a的至少一个方法步骤、尤其是方法步骤106a中,借助控制和/或调节单元52a根据所感测的运动特征量、尤其是锯剑板14a的速度和/或根据链锯10a的操纵元件24a的操纵来确定链锯10a的进给运动的方向。
[0047]
在方法100a的至少一个另外的方法步骤108a中,借助制动设备20a的控制和/或调节单元52a根据链锯10a的壳体单元12a和/或锯剑板14a的运动来确定用于求取与链锯10a的锯剑板14a的反冲不同的危险状况的至少一个边界值。特别优选,借助控制和/或调节单元52a根据所辨识的可能的危险状况来确定用于求取与链锯10a的锯剑板14a的反冲不同的危险状况的边界值。在方法100a的至少一个另外的方法步骤、尤其是方法步骤108a中,借助控制和/或调节单元52a根据所感测的运动特征量和/或壳体单元12a和/或锯剑板14a的尤其是在加工工件期间的运动建立链锯10a的至少一个尤其是动态的虚拟模型,其中,尤其是为了辨识可能的危险状况和/或与链锯10a的锯剑板14a的反冲不同的危险状况而考虑链锯10a的虚拟模型。
[0048]
在方法100a的至少一个方法步骤110a中,借助制动设备20a的控制和/或调节单元52a通过机器学习方法求取用于求取与链锯10a的锯剑板14a的反冲不同的危险状况的至少一个边界值。在机器学习中,借助控制和/或调节单元52a和/或借助至少外部单元47a,尤其是服务器,计算中心和/或由多个链锯10a组成的网络,将存放的多个数据、尤其是运动特征量、运行特征量和/或求取的危险状况考虑用于边界值的适配。尤其是在机器学习中,借助控制和/或调节单元52a和/或借助至少外部单元47a,将针对链锯10a的至少100次切割所感测的运动特征量、尤其是所感测的运动特征量的平均走向考虑用于边界值的适配。机器学习方法通过用于辨识至少一个危险状况的至少一个算法来进行,其中,所述算法配置用于,借助至少一个所感测的运动特征量、尤其是所感测的运动特征量的平均走向来辨识危险状况和适配边界值。优选,借助控制和/或调节单元52a给机器学习方法预给定至少一个边界值,其中,尤其是,所述算法设置用于将边界值优选连续适配。在方法100a的至少一个方法步骤、尤其是方法步骤110a中,借助控制和/或调节单元52a,通过至少一个分簇方法,将数据、尤其是至少一个所感测的运动特征量、至少一个运动特征量的平均走向和/或至少一个所感测的运行特征量划分成多个组,用于辨识危险状况,其中,每个组配有运动特征量的至少一个特征样式和/或运动特征量的走向。尤其是,借助控制和/或调节单元52a根据操作者、根据要加工的工件、根据所用的锯链16a的类型和根据锯链16a的使用时长或者用旧程度来划分这些组,其中,尤其是针对每个组借助控制和/或调节单元52a通过算法确定不同的用于求取危险状况的边界值。尤其是在方法100a的至少一个方法步骤、尤其是方法步骤110a中,到组的分配借助控制和/或调节单元52a,尤其是通过传感器单元36a,根据所感测
的运动特征量、所感测的运动特征量的平均走向、操作者输入和/或所感测的运行特征量来进行。在方法100a的至少一个方法步骤、尤其是方法步骤110a中,借助制动设备20a的至少一个通信单元45a,将电子数据、尤其是所感测的运动特征量、所感测的运行特征量、算法等传输给外部单元47a,并且,尤其是设置用于用在机器学习方法中的电子数据、尤其是运动特征量的值、运动特征量的走向、运行特征量和/或算法被外部单元47a接收。尤其是,通过通信单元45a接收的、尤其是设置用于用在机器学习方法中的电子数据借助控制和/或调节单元52a被考虑用于求取边界值和/或适配算法。在机器学习方法中,运行特征量被考虑用于感测锯链16a的类型或者锯链16a的用旧、用于确定链锯10a的操作者和/或用于求取工件的类型。借助控制和/或调节单元52a在机器学习方法中,通过驱动单元18a在切割工件时的转速、锯剑板14a沿进给方向的速度和通过对借助传感器单元36a所感测的工件数据的分析评价来求取工件的类型。
[0049]
在方法100a的至少一个另外的方法步骤111a中,在能尤其是借助制动设备20a的操作单元44a的操作元件25a根据所感测的运动特征量和/或使用者输入来激活和/或停用的学习模式中进行机器学习方法,其中,尤其是在学习模式中,操作者在操纵制动单元42a期间或者之后通过输出元件48a和/或操作元件25a查验制动设备20a的功能,其中,尤其是借助控制和/或调节单元52a检查求取的危险状况的正确性、尤其是制动单元42a的操纵的正确性。尤其是,借助控制和/或调节单元52a在感测到输出元件48a和/或操作元件25a的预给定的操纵样式的情况下操作者识别到求取的危险状况、尤其是制动单元44a的操纵的正确性。在学习模式中,借助控制和/或调节单元52a根据输出元件48a和/或操作元件25a的操纵时长来评价求取的危险状况、尤其是制动单元42a的操纵的正确性,其中,例如在操纵制动单元42a之后在借助控制和/或调节单元52a和/或传感器单元36a所感测的、输出元件和/或操作元件的操纵暂停的时段少于1秒的情况下识别到错误辨识的危险状况和/或制动单元42a的非期望的操纵。尤其是在方法100a的至少一个方法步骤、尤其是方法步骤111a中,在学习模式中借助控制和/或调节单元52a根据所查验的功能,来适配算法和/或用于求取危险状况的边界值。
[0050]
在方法100a的至少一个另外的方法步骤112a中,借助制动设备20a的至少控制和/或调节单元52a根据链锯10a的尤其是所感测的运行特征量、尤其是链锯10a的驱动单元18a或者锯链16a的转速来确定用于求取与链锯10a的锯剑板14a的反冲不同的危险状况的至少一个边界值。尤其是借助控制和/或调节单元52a根据运行特征量来求取锯链16a与工件的接触。尤其是在方法100a的至少一个方法步骤、尤其是方法步骤108a中,借助控制和/或调节单元52a根据运行特征量和至少一个所感测的运动特征量求取链锯10a的进给方向。在方法100a的至少一个方法步骤、尤其是方法步骤112a中,借助控制和/或调节单元52a根据运行特征量辨识与链锯10a的锯剑板14a的反冲不同的危险状况,其中,尤其是在超过运行特征量边界值的情况下适配边界值。
[0051]
在方法100a的至少一个另外的方法步骤114a中,借助制动设备20a的控制和/或调节单元52a根据通过操作者尤其是借助制动设备20a的操作单元44a执行的设定来确定用于求取与链锯10a的锯剑板14a的反冲不同的危险状况的至少一个边界值。优选在方法100a的至少一个方法步骤、尤其是方法步骤114a中,进行对通过操作者借助操作单元44a的操作元件25a、输出元件48a和/或另外的操作元件进行的设定的选择。尤其是借助控制和/或调节
单元52a给每个可能的设定配属至少一个用于求取危险状况的边界值。
[0052]
在方法100a的至少一个另外的方法步骤116a中,借助制动设备20a的更新单元46a,至少根据所感测的运动特征量,操纵制动设备20a的制动单元42a,用于链锯10a的锯链16a的制动和/或脱耦,并且将制动设备20a的操作单元44a的至少一个尤其是能运动的输出元件48a激活,用于将制动单元42a的操纵状态输出给操作者。在方法100a的至少一个另外的方法步骤118a中,借助制动设备20a的控制和/或调节单元52a根据所感测的运动特征量、尤其是所确定的边界值来求取与链锯10a的锯剑板14a的反冲不同的危险状况。在方法100a的至少一个另外的方法步骤120a中,借助更新单元46a,根据至少一个至少通过所感测的运动特征量求取的与链锯10a的锯剑板14a的反冲不同的危险状况,来操纵制动单元42a和将输出元件48a激活。优选,在通过更新单元46a借助更新单元46a的触发元件58a,64a激活输出元件48a的情况下,输出元件48a绕输出元件48a的至少一个枢转轴线运动到截止位置。在方法100a的至少一个方法步骤、尤其是方法步骤120a中,在操纵制动单元42a的情况下,控制和/或调节单元52a和传感器单元36a转换到至少一个消极状态中,其中,尤其是停止运动特征量的感测和/或危险状况的求取。在方法100a的至少一个方法步骤、尤其是方法步骤120a中,借助更新单元46a将输出元件48a以从制动单元42a的操纵机械脱耦的方式激活。
[0053]
优选,在方法100a的至少一个另外的方法步骤122a中,在激活输出元件48a和操纵制动单元42a之后,借助输出元件48a的停用、尤其是返回运动来松开制动单元42a。尤其是在方法100a的至少一个另外的方法步骤、尤其是方法步骤122a中,在松开制动单元42a的情况下,控制和/或调节单元52a和传感器单元36a被转换到活动状态中,其中,尤其是连续进行运动特征量的感测和/或危险状况的求取。尤其是通过借助操作者将输出元件48a从截止位置运动到输出元件48a的基本位置来进行输出元件48a的停用和/或返回运动。
[0054]
在图4中针对链锯10a的两个不同的锯切过程示出借助制动设备20a的传感器单元36a所感测的构造为角速度的运动特征量的走向。为了求取构造为链锯10a的摆振的危险状况200a,借助制动设备20a的控制和/或调节单元52a确定沿至少基本上平行于链锯10a进给方向定向的方向的200度/秒的边界值202a。第一走向204a示出在没有危险状况200a下的锯切过程。第二走向206a示出具有多个构造为链锯10a的摆振的危险状况200a的锯切过程,这些摆振分别能通过运动特征量的值的显著偏移识别出。图4所示的纵坐标208a是单位为度/秒的角速度。图4所示的横坐标209a是时间。尤其是第二走向206a在危险状况200a后分别示出角速度的正偏移,其中,操作者将链锯10a、尤其是链锯10a的锯剑板14a在链锯10a的摆振之后又置于工件上。例如也可设想,根据运动特征量的平均值动态地确定用于求取危险状况200a的边界值202a。
[0055]
在图5中针对链锯10a的另外两个不同的锯切过程示出借助制动设备20a的传感器单元36a所感测的构造为角速度的运动特征量的另外的走向。为了求取构造为链锯10a的摆振的危险状况200a,借助制动设备20a的控制和/或调节单元52a确定沿至少基本上平行于链锯10a进给方向定向的方向的200度/秒的边界值202a。第一另外的走向210a示出具有构造为锯剑板14a的反冲的危险状况212a的锯切过程。第二另外的走向214a示出两个具有两个构造为链锯10a的摆振的危险状况200a的锯切过程。危险状况200a,212a能分别通过运动特征量的值的显著的偏移而被识别出。图5所示的纵坐标208a是单位为度/秒的角速度。图5所示的横坐标209a是时间。运动特征量的配属于构造为锯剑板14a的反冲的危险状况212a
的尖峰分别具有最大值的较大量值和与运动特征量的配属于构造为链锯10a的摆振的危险状况200a的尖峰不同的方向。
[0056]
在图6至8中示出本发明的另外的实施例。后面的描述和附图基本上局限于这些实施例之间的区别,其中,关于名称相同的构件、尤其是关于具有相同附图标记的构件原则上也可参阅其他实施例的、尤其是图1至5的描述。为了区分这些实施例,在图1至5的实施例的附图标记之后放置字母a。在图6至8的实施例中,以字母b至d取代字母a。
[0057]
在图6中在制动设备20b的制动单元42b的区域中示出链锯10b的制动设备20b的第一替代构型。制动设备20b具有:传感器单元36b,所述传感器单元36b包括传感器元件38b和另一传感器元件40b,用于感测链锯10b的至少一个运动特征量;制动单元42b,用于链锯10b的锯链16b的制动和/或脱耦;用于与操作者交互作用的操作单元44b;和,更新单元46b,其设置用于,至少根据所感测的运动特征量操纵制动单元42b并将操作单元44b的尤其是能运动的输出元件48b激活,所述输出元件向操作者输出制动单元42b的操纵状态。更新单元46b设置用于,根据至少一个至少通过所感测的运动特征量求取的与链锯10b的锯剑板14b的反冲不同的危险状况来操纵制动单元42b和将输出元件48b激活。图6所示的制动设备20b具有至少基本上与在图1至5的描述中所述的制动设备20a类似的构型,从而关于图6所示的制动设备20b的构型至少基本上可参阅图1至5的描述。与在图1至5的描述中所述的制动设备20a不同,图6所示的制动设备20b的更新单元46b优选具有一个更新元件56b,所述更新元件由形状记忆合金构成并且设置用于尤其是在辨识到危险状况的情况下通过制动设备20b的控制和/或调节单元52b激励时直接操纵制动单元42b的两个制动元件54b并且使更新单元46b的耦合元件60b运动以释放更新单元46b的触发元件58b,其中,触发元件58b将输出元件48b激活。制动单元42b构造为力锁合制动器。制动元件54b将链锯10b的驱动单元18b的驱动元件50b至少绝大部分包围。尤其是两个制动元件54b在至少一个截平面中半环形地构造。更新元件56b包围两个制动元件54b并且设置用于在通过控制和/或调节单元52b激励的情况下收缩,其中,两个制动元件54b运动到驱动元件50b上。制动元件54b尤其是设置用于,将驱动元件50b通过力锁合来制动。在被激励的更新元件56b收缩的情况下,耦合元件60b运动到将触发元件58b释放的位置中。
[0058]
在图7中在制动设备20c的制动单元42c和更新单元46c的区域中示出链锯10c的制动设备20c的第二替代构型。制动设备20c具有传感器单元36c,所述传感器单元36c包括用于感测链锯10c的至少一个运动特征量的传感器元件38c。制动设备20c包括用于链锯10c的锯链16c的制动和/或脱耦的制动单元42c、用于与操作者的交互作用的操作单元44c和更新单元46c,其设置用于,至少根据所感测的运动特征量操纵制动单元42c和将操作单元44c的尤其是能运动的输出元件48c激活,所述输出元件向操作者输出制动单元42c的操纵状态。更新单元46c设置用于,根据至少一个至少通过所感测的运动特征量和/或所感测的运行特征量求取的与链锯10c的锯剑板14c的反冲不同的危险状况来操纵制动单元42c和将输出元件48c激活。图7所示的制动设备20c具有与在图1至5的描述中所述的制动设备20a至少基本上类似的构型,使得在图7所示的制动设备20c的构型方面至少基本上可参阅图1至5的描述。与图1至5的描述中所述的制动设备20a不同,图7所示的制动设备20c的更新单元46c仅仅具有一个触发元件58c,所述触发元件设置用于,在借助控制和/或调节单元52c操控更新单元46c的情况下通过更新单元46c的耦合元件60c将输出元件48c激活和操纵制动单元
42c。更新单元46c包括由形状记忆合金构成的更新元件56c。更新元件56c尤其是在图7所示的替代接线图中与晶体管68c和尤其是构造为电容器的电容70c布置在一个导体回路中。更新元件56c在一个端部经由晶体管68c与控制和/或调节单元52c、尤其是控制和/或调节单元52c的一个电极连接。但也可设想更新单元46c和/或控制和/或调节单元52c的其他构型,尤其是用于更新元件56c的替代的操控。触发元件58c构造为弹簧。耦合元件60c设置用于,将触发元件58c在更新单元46c的未激活状态中保持在预紧的状态中。耦合元件60c构造为杠杆。但也可设想,耦合元件60c的其他构型,例如构型为滑动件,电磁铁等。耦合元件60c设置用于,在借助控制和/或调节单元52c尤其是通过更新元件56c的更新来操控更新单元46c的情况下,来将触发元件58c释放,其中,尤其是操纵制动单元42c和将输出元件48c激活。触发元件58c设置用于,在被耦合元件60c释放的情况下,将制动元件54c以触发力加载并且与驱动元件50c形成接触,用于锯链16c的制动和/或脱耦。但也可设想,触发元件58c的其他构型,尤其是与耦合元件60c无关的构型,例如构型为电磁铁、气动元件、液压元件、压电元件等。更新元件56c尤其是设置用于,在激励的情况下使耦合元件60c绕悬挂点62c运动和将触发元件58c释放。更新元件56c与耦合元件60c固定连接,其中,耦合元件60c在更新元件56c的形状状态过渡的情况下绕悬挂点62c运动。触发元件58c通过触发力激活输出元件48c,其中,输出元件48c运动到截止位置中。输出元件48c设置用于,在通过操作者从截止位置运动到基本位置中的情况下,将触发元件58c压紧并将制动元件54c从驱动元件50c分开。
[0059]
在图8中在制动设备20d的制动单元42d和更新单元46d的区域中示出链锯10d的制动设备20d的第三替代构型。图8所示的制动设备20d具有至少基本上与图1至5的描述中所述的制动设备20a类似的构型,使得关于图8所示的制动设备20d的构型至少基本上可参阅图1至5的描述。与图1至5的描述中所述的制动设备20a不同,图8所示的制动设备20d的更新单元46d优选具有更新元件56d和另一更新元件66d,其中,更新元件56d设置用于操纵制动单元42d,而另一更新元件66d设置用于将制动设备20d的操作单元44d的输出元件48d激活。更新元件56d和另一更新元件66d相互分开地构造。更新元件56d设置用于将更新单元46d的第一触发元件58d直接释放,以操纵制动单元42d、尤其是制动单元42d的制动元件54d。另一更新元件66d设置用于将更新单元46d的第二触发元件64d直接释放,以激活输出元件48d。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1