摄像头多工位AA组装机的制作方法
摄像头多工位aa组装机
技术领域
[0001]
本发明涉及物料传输技术领域,特别涉及一种摄像头多工位aa组装机。
背景技术:
[0002]
半导体在手机、汽车、传感器等领域有着非常广泛的运用,半导体作为手机、电脑的一种核心部件,技术日益增强,社会需求逐渐增大,半导体趋向小型化,而且制造数量巨大。
[0003]
随着摄像头要求的逐步提升,对半导体的制造精度要求也随之提升。在半导体的制作过程中通常需要采用光学主动对准设备,即aa(active alignment machine)工艺。aa工艺可对摄像头的全部六个自由度进行调整,实现对准功能,是现有技术常用的调整工艺。
[0004]
但是aa工艺中通过驱动电机对全部六个自由度进行同步联动进行调整,不仅占用较大的设备体积且工艺流程复杂。
技术实现要素:
[0005]
有鉴于此,本发明提供一种摄像头多工位aa组装机,减小设备占用空间。
[0006]
为解决上述技术问题,本发明提供一种摄像头多工位aa组装机。
[0007]
根据本发明实施例的摄像头多工位aa组装机,包括:
[0008]
第一基座;
[0009]
第一物料传输机构,所述第一物料传输机构安装于所述第一基座上,所述第一物料传输机构将第一物料传送至aa工作区;
[0010]
第二物料传输机构,所述第二物料传输机构安装于所述第一基座上,所述第二物料传输机构将第二物料传送至aa工作区;其中,在aa工作区第一物料位于第二物料的正下方;
[0011]
点胶机构,位于aa工作区的所述点胶机构固定安装于所述第一基座上,所述点胶机构位于所述第一物料传输机构与第二物料传输机构之间;第一物料在所述第一物料传输机构的作用下传输至点胶机构处,以进行点胶动作;
[0012]
图像采集机构,所述图像采集机构位于aa工作区的正上方;所述图像采集机构用于采集位于aa工作区内的第一物料或第二物料的姿态数据;
[0013]
调节机构,所述调节机构包括第一调节机构与第二调节机构,所述第一调节机构与第二调节机构分别安装于所述第一物料传输机构与第二物料传输机构上;所述第一调节机构与第二调节机构根据所述图像采集机构采集的姿态数据分别对第一物料的位移姿态或第二物料的角度姿态进行调节,以使得第一物料匹配第二物料。
[0014]
优选地,所述第一物料传输机构包括:
[0015]
第一料仓模组,所述第一料仓模组内容置若干第一载板,第一载板上放置若干第一物料;
[0016]
第一载板取料模组,所述第一载板取料模组的一端连接所述第一料仓模组,所述
第一载板取料模组从所述第一料仓模组内夹取第一载板;
[0017]
第一物料取料模组,所述第一物料取料模组与第一载板取料模组相邻设置,当第一载板被所述第一载板取料模组夹取并传送至指定位置后,所述第一物料取料模组从第一载板上吸取物料并传送至所述第一调节机构上。
[0018]
优选地,所述第一载板取料模组包括:
[0019]
第一载板传输模组,所述第一载板传输模组包括第二基座、第一驱动组件、第一滑轨、第一滑座;第一滑轨、第一驱动组件固定安装于所述第二基座上,所述第二基座固定安装于所述第一基座上;所述第一滑轨与第一滑座滑动连接;所述第一滑座在所述第一驱动组件的驱动力下沿所述第一滑轨方向往复运动;
[0020]
载板加工模组,所述载板加工模组包括载板组件,所述载板组件上设置有用于放置第一载板的上层容置轨道与下层容置轨道,所述上层容置轨道在竖直方向上平行所述下层容置轨道且位于其上方;
[0021]
第一载板夹取模组,所述第一载板夹取模组包括第三基座、第一载板夹取组件、第二驱动组件、第二滑轨、第二滑座;所述第三基座固定安装于所述第一滑座上,所述第一载板夹取组件与第二驱动组件固定连接,所述第二驱动组件与第二滑座固定连接;所述第二滑座与第二滑轨滑动连接;所述第一载板夹取组件在所述第二驱动组件的驱动力下沿所述第二滑轨方向运动,以将载板从所述下层容置轨道内移至所述上层容置轨道内。
[0022]
优选地,所述第一载板夹取组件还包括:
[0023]
顶板,用于将第一载板顶起的所述顶板在所述第一驱动组件与第二驱动组件的驱动力下运动至第一载板的下方并将其扛起,以将第一载板从所述下层容置轨道移动至所述上层容置轨道;
[0024]
第三驱动组件,所述第三驱动组件固定安装于所述顶板上;
[0025]
夹料块,所述夹料块包括第一夹料块与第二夹料块,所述第一夹料块与第二夹料块分别位于所述顶板的两端,所述第一夹料块在所述第三驱动组件的驱动力下向所述第二夹料块移动,以夹紧位于所述第一夹料块与第二夹料块之间的载板;
[0026]
第四驱动组件,所述第四驱动组件安装于所述顶板上;
[0027]
夹爪,用于夹持第一载板的所述夹爪包括上夹爪与下夹爪,所述上夹爪固定安装于所述顶板的上表面,所述下夹爪连接所述第四驱动组件并位于所述顶板的下方;所述下夹爪在所述第四驱动组件的驱动力下向所述上夹爪运动,以夹紧第一载板;
[0028]
所述载板加工模组还包括第二传输模组,所述第二传输模组包括第四基座、第五驱动组件、第三滑轨、第三滑座;所述第五驱动组件、第三滑轨固定安装于所述第四基座上,所述第四基座固定安装于所述第一基座上;所述第三滑轨与第三滑座滑动连接;所述第三滑座在所述第五驱动组件的驱动力下沿所述第三滑轨方向做往复运动。
[0029]
优选地,所述第二物料传输机构包括:
[0030]
第二料仓模组,所述第二料仓模组内容置若干第二载板,第二载板上放置若干第二物料;
[0031]
第二载板取料模组,所述第二载板取料模组的一端连接所述第二料仓模组,所述第二载板取料模组从所述第二料仓模组内夹取第二载板;
[0032]
第二物料取料模组,所述第二物料取料模组与第二载板取料模组相邻设置,当第
二载板被所述第二载板取料模组夹取并传送至指定位置后,所述第二物料取料模组从第二载板上吸取物料并传送至aa工作区。
[0033]
优选地,所述第二载板取料模组包括:
[0034]
第二载板传输模组,所述第二载板传输模组包括第五基座、第一轨道组件、第二轨道组件;所述第五基座固定安装于所述第一基座上;所述第一轨道组件、第二轨道组件固定安装于所述第五基座上,所述第一轨道组件位于所述第二轨道组件的下方;
[0035]
第二载板夹取模组,所述第二载板夹取模组在所述第一轨道组件上运动;所述第二载板夹取模组包括固定座、第四滑轨、第四滑座、第六驱动组件、第二载板夹爪组件;所述第四滑轨固定安装于所述固定座上,所述第四滑轨与第四滑座滑动连接,所述第二载板夹爪组件在所述第六驱动组件的驱动力下对所述第二料仓模组中不同位置的第二载盘进行夹取;
[0036]
所述第二载板夹爪组件将夹取的第二载盘放置于所述第二轨道组件上,第二轨道组件在所述第六驱动组件的驱动力下运动至指定位置。
[0037]
优选地,所述第一轨道组件包括第七驱动组件、第五滑座、第五滑轨;所述第七驱动组件、第五滑轨固定安装于所述第五基座内壁上,所述第五滑座与第五滑轨滑动连接;所述第五滑座固定连接所述固定座,所述固定座在所述第七驱动组件的驱动力下沿所述第五滑轨方向做往复运动;
[0038]
所述第二轨道组件包括第六滑座、第六滑轨、载盘承载板;所述第六滑轨固定安装于所述第五基座内壁上,所述第六滑座与第六滑轨滑动连接;所述载盘承载板固定安装于所述第六滑座上,所述载盘承载板上放置有第二载板与第三载板;所述第二轨道组件在所述第二夹取模组的作用下沿所述第六滑轨方向做往复运动;其中,第二载板用于放置半成品物料,第三载板用于放置不合格品物料。
[0039]
优选地,所述第一调节机构包括:
[0040]
第一位移模组,所述第一位移模组包括第六基座、第七滑轨、第八驱动组件、第七滑座、第一承载板;所述第七滑轨与第八驱动组件固定安装于所述第六基座上;所述第七滑轨与第七滑座滑动连接;所述第七滑座与第一承载板固定连接;所述第七滑座与第一承载板在所述第八驱动组件的驱动力下沿所述第七滑轨方向往复运动;
[0041]
第二位移模组,所述第二位移模组包括第八滑轨、第八滑座、第九驱动组件、竖板、第九滑轨、第九滑座、第十驱动组件;第八滑轨固定安装于所述第一承载板上,第八滑座与第八滑轨滑动连接,所述第八滑座在所述第十驱动组件的驱动力下沿所述第八滑轨方向往复运动;
[0042]
所述竖板垂直固定安装于所述第八滑座上,所述第九驱动组件与第九滑轨固定安装于所述竖板的侧面,所述第九滑座与第九滑轨滑动连接;所述第九滑座在所述第九驱动组件的驱动力下沿所述第八滑轨的垂直方向往复运动;
[0043]
芯片治具模组;
[0044]
所述安装底座固定安装于所述第九滑座上,所述芯片治具模组固定安装于所述第一调节板的表面;所述芯片治具模组在所述第八驱动组件、第九驱动组件、第十驱动组件的驱动力下进行多方位运动;
[0045]
所述第二调节机构包括第二载板夹爪组件、第七基座、角度调节组件,所述第七基
座固定安装于所述第一基座上,所述角度调节组件包括第十一驱动组件、第十二驱动组件、第十三驱动组件,所述第十一驱动组件、第十二驱动组件、第十三驱动组件分别安装于所述第七基座上;所述第十一驱动组件、第十二驱动组件、第十三驱动组件用于驱动所述第二载板夹爪组件以调节第二物料的三个角度姿态。
[0046]
优选地,所述第一物料取料模组包括:
[0047]
第一传送模组,所述第一传送模组包括第十滑座、第十四驱动组件、第十滑轨、第八基座;所述第八基座固定安装于所述第一基座上;所述第十滑轨与第十四驱动组件固定安装于所述第八基座上;所述第十滑座与第十滑轨滑动连接;所述第十滑座在所述第十四驱动组件的驱动下沿所述第十滑轨方向往复运动;
[0048]
第一物料取料机构,所述第一物料取料机构包括:
[0049]
第二传送模组,所述第二传送模组包括第九基座、第十五驱动组件、第十一滑座、第十一滑轨;所述第九基座固定安装于第十滑座的表面,以使得所述第二传送模组跟随所述第十滑座一起运动;所述第十一滑轨、第十五驱动组件固定安装于所述第九基座上;所述第十一滑座与第十一滑轨滑动连接;所述第十一滑座在第十五驱动组件的驱动下沿第十一滑轨方向往复运动;
[0050]
吸料模组,所述吸料模组包括第一固定板、第一取料组件、第二取料组件;所述第一固定板固定连接所述第九基座,以使得所述吸料模组跟随所述第十一滑座一起运动;所述第一取料组件与第二取料组件分别与所述第一固定板连接;其中,
[0051]
所述第一取料组件或第二取料组件包括第十六驱动组件、第十二滑轨、吸嘴组件;所述第十六驱动组件、第三导轨固定安装于所述第一固定板上,所述吸嘴组件与第十二滑轨滑动连接;所述吸嘴组件在所述第十六驱动组件的驱动力下沿所述第十二滑轨方向往复运动,以吸取或放下物料。
[0052]
优选地,所述吸嘴组件包括吸杆组件、移动组件;所述移动组件的一端固定连接所述第十六驱动组件,所述移动组件的另一端与第十二滑轨滑动连接;所述吸杆组件固定安装于所述移动组件上;所述吸杆组件在所述第十六驱动组件的作用下沿所述第十二滑轨方向往复运动,以吸取或放下物料。
[0053]
本发明的上述技术方案的有益效果如下:
[0054]
根据本发明实施例的摄像头多工位aa组装机,该aa组装机包括四个aa工作区,四个aa工作区可独立运行,左右两组可以生产不同的产品,整机空间利用率高,具有通用性与高效性;
[0055]
该aa组装机将传统全部六个自由度进行同步联动调节的调节机构拆分成第一调节机构与第二调节机构,以独立进行角度或位移调节,不仅能降低整个设备的体积,且可以灵活选择工艺流程,降低生产成本;
[0056]
该aa组装机中的第一载板取料模组上设置有上层容置轨道与下层容置轨道,通过夹爪模组将下层容置轨道上的载板载取至上层容置轨道上,减小载板在同一径向上的行程,以减小整个取料设备的体积,降低取料装置的搬运成本;
[0057]
该aa组装机中的第一物料取料模组,一个吸料模组上设置有两个吸嘴组件,两个吸嘴组件独立运行,提高取料效率,降低成本并减小设备体积;该模组包括运动行程较大的基座模组与运动行程较精确的取料模组,同一个方向通过两个模组运动以实现机械臂的精
确取料;取料模组通过摄像头组件对待吸取的物料进行拍照,主控板对照片进行处理后发送指令给驱动组件,驱动组件驱动吸嘴组件运动以精确吸取物料,通过摄像头组件提高吸取机构的取料精度;吸取机构包括双工位即两个吸嘴组件,提高取料效率;
[0058]
该aa组装机中的第二载板取料模组通过夹取模组将料仓模组内的载盘进行夹取并通过第一导轨组件与第二导轨组件进行传输上料与传输下料,夹取模组设有双向夹爪以分别夹取半成品载板进行下料与夹取废料载板进行下料,双向夹爪进行夹取提高半导体产品的传输效率;在夹取模组内设有的弹性组件吸收电机及运行过程中产生的振动,以减小传递至夹爪组件上的振动力,避免了夹爪组件夹持的载板上的物料出现掉落的现象;
[0059]
该aa组装机中的第一调节机构通过第一调节模组与第二调节模组对芯片的位置进行多方位调整,以调节芯片姿态降低aa工艺的对准难度以及对准成本;另外,第一调节模组与第二调节模组对芯片治具起到校准的作用,定期校准提高芯片治具的位置精度。
附图说明
[0060]
图1为本发明一个实施例的摄像头多工位aa组装机的俯视图;
[0061]
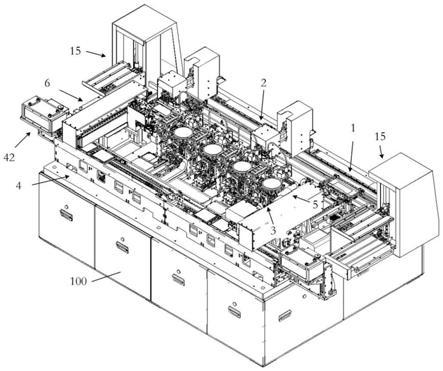
图2为本发明一个实施例的摄像头多工位aa组装机的立体图;
[0062]
图3为本发明一个实施例的摄像头多工位aa组装机的第一载板取料模组的结构示意图;
[0063]
图4为本发明一个实施例的摄像头多工位aa组装机的第一载板取料模组的一个状态结构示意图;
[0064]
图5为图4中的第一载板取料模组的局部侧视图;
[0065]
图6为图4中的第一载板取料模组的另一个局部侧视图;
[0066]
图7为图6中的夹爪的结构示意图;
[0067]
图8为图6中的夹料块的结构示意图;
[0068]
图9为图4中的载板加工模组的结构示意图;
[0069]
图10为图4中的载板加工模组的另一个角度的结构示意图;
[0070]
图11为本发明一个实施例的第一载板夹取模组的一个状态结构示意图;
[0071]
图12为图11的a处的放大图;
[0072]
图13为本发明实施例中的第一物料取料模组的整体结构示意图;
[0073]
图14为图13中的第一传送模组的局部结构示意图;
[0074]
图15为图13中的取料机构的结构示意图;
[0075]
图16为图13中的取料机构的另一个角度的结构示意图;
[0076]
图17为图16的局部结构示意图;
[0077]
图18为本发明实施例中的第一调节机构的整体结构示意图;
[0078]
图19为图18中的第一位移模组的结构示意图;
[0079]
图20为图18中的第二位移模组的结构示意图;
[0080]
图21为图18中的调节机构的结构示意图;
[0081]
图22为图18中的调节机构的另一个角度的结构示意图;
[0082]
图23为图18中的芯片治具模组的结构示意图;
[0083]
图24为本发明实施例中的第二载板取料模组的整体结构示意图;
[0084]
图25为图24中的第二载板取料模组的局部结构示意图;
[0085]
图26为图24中的第二载板取料模组的另一个状态示意图;
[0086]
图27为图26中a处的放大图;
[0087]
图28为图24中的第二载板夹取模组的结构示意图;
[0088]
图29为图24中的第二载板夹取模组的侧视图;
[0089]
图30为图24中的第二料仓模组的结构示意图;
[0090]
图31为图30中的第二料仓模组的剖视图;
[0091]
图32为本发明实施例中的aa工作区的局部结构示意图;
[0092]
图33为本发明实施例中的aa工作区的另一个局部结构示意图;
[0093]
图34为图33中a出的放大图。
[0094]
附图标记:
[0095]
第一基座100;第一载板取料模组1;载板加工模组11;第五驱动组件110;底部固定板111;线性导向轴112;导向轴固定板113;第四基座114;载板组件115;内侧滚动条1151;推料压板1152;调节杆1153;滚动轴承1154;上层容置轨道1155;下层容置轨道1156;第三滑座1157;固定轨道架板1158;第三滑轨116;第一载板传输模组12;第一基座121;第一驱动组件122;第一滑轨123;电机传动板124;第一滑座125;第一载板夹取模组13;第三基座131;位置调节板132;第二滑轨133;电机支撑板134;第二驱动组件135;顶板136;夹料块137;第一夹料块1371;第一弹性胶块1372;第三驱动组件1373;第二夹料块1374;夹爪138;上夹爪1381;第四驱动组件1382;第二弹性胶块1383;下夹爪1384;第一载板14;第一料仓模组15;
[0096]
第一物料取料模组2;第一传送模组21;第八基座211;封板212;第十滑轨213;第十四驱动组件214;第十滑座215;取料机构22;第二传送模组221;第九基座2211;磁力弹簧2212;第十一滑座2215;第十五驱动组件2216;第十一滑轨2217;吸料模组222;第一固定板222a;第三固定板222b;弹性组件222c;第二固定板222d;旋转电机222e;摄像头组件222f;第十二滑轨222g;吸杆组件222h;移动板222m;第十六驱动组件222n;吸嘴升降板222j;
[0097]
第一调节机构3;第一位移模组31;第六基座311;第七滑座312;第八驱动组件313;第一承载板314;第七滑轨315;第二位移模组32;第八滑轨320;第二承载板321;连接板322;竖板323;磁力弹簧324;第九滑座325;第九滑轨326;第八滑座327;第九驱动组件329;第十驱动组件328;第一物料位置调节机构33;第一调节板331;第二调节板332;第一调节件333;安装底座334;弹性件335;第一连接件336;承载钢球337;第二调节件338;侧板339;芯片治具模组34;传感器340;传感器安装板341;支撑连接块342;导轨连接块343;芯片固定板344;芯片基座345;芯片346;气缸驱动组件347;微型气接头348;第十三滑轨349;
[0098]
第二载板取料模组4;第二载板传输模组41;第五基座411;第六滑轨412;第五滑轨413;第七驱动组件414;第六滑座415;载盘承载板416;第三载板417;凸块4171;气缸夹紧组件418;第二载板419;第二料仓模组42;料仓托盘421;料仓422;丝杆组件423;料仓支撑导轨组件424;步进电机425;第十基座426;同步带427;第二载板夹取模组43;滑块固定座431;夹爪固定座432;第四滑座433;第六驱动组件434;弹性组件435;第四滑轨436;夹爪组件437;第一夹爪4371;第二夹爪4372;弹性垫4373;
[0099]
aa工作区5;点胶机构51;点胶头511;点胶驱动512;固化灯513;第二调节机构52;第十一驱动组件521;第十二驱动组件522;第十三驱动组件523;镜头53;第七基座541;第二
载板夹爪组件542;
[0100]
第二物料取料模组6。
具体实施方式
[0101]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
[0102]
下面首先结合附图具体描述根据本发明实施例的摄像头多工位aa组装机。本发明实施例中提供的多工位aa组装机包括四个aa工作区,对称设置的两个第一物料传输机构、对称设置的第二物料传输机构。如图1、图2所示,四个aa工作区可独立运行,左右两组可以生产不同的产品,整机空间利用率高,具有通用性与高效性。
[0103]
如图1至图2所示,根据本发明实施例的摄像头多工位aa组装机,包括第一基座100、第一物料传输机构、第二物料传输机构、点胶机构51、图像采集机构、调节机构;其中,
[0104]
第一物料传输机构安装于第一基座100的长度方向的一侧边,第一物料传输机构用于将第一物料传送至aa工作区。aa工作区应当理解为第一物料与第二物料进行匹配的区域。aa(active alignment machine)主动对准设备,主动对准的过程中包括对第一物料与第二物料的六个自由度进行调整。
[0105]
利用第一物料传输机构与第二物料传输机构分别对第一物料与第二物料进行传输至aa工作区后,第一物料与第二物料的姿态各不相同,无法完全匹配。通过调节机构对第一物料与第二物料的姿态进行调整,调整后在进行固定贴合,提高产品的精度。在本发明的实施例中,第一物料与第二物料分别包括芯片与镜头。
[0106]
第二物料传输机构安装于第一基座100的长度方向的一侧边,第一物料传输机构与第二物料传输机构相对设置,第二物料传输机构用于将第二物料传输至aa工作区5。在aa工作区5内第一物料位于第二物料的正下方,即镜头位于芯片的正上方。
[0107]
点胶机构51固定安装于第一基座100上,点胶机构51位于第一物料传输机构与第二物料传输机构之间;第一物料在第一物料传输机构的作用下传输至点胶机构51处,以进行点胶动作;当芯片与镜头进行第一次aa之后,第一aa用于检测芯片与镜头是否为合格品。当芯片与镜头检测为合格品后,点胶机构用于对芯片进行点胶动作。
[0108]
图像采集机构位于aa工作区5的正上方,图像采集机构用于采集位于aa工作区5内的第一物料与第二物料的姿态数据,并将采集的姿态数据反馈给主控板,主控板根据接收的姿态数据发送指令给调节机构,以调节第一物料与第二物料的姿态。
[0109]
调节机构包括第一调节机构3与第二调节机构52,第一调节机构3与第二调节机构52分别安装于第一物料传输机构与第二物料传输机构上;第一调节机构与第二调节机构根据图像采集机构采集的姿态数据分别对第一物料的位移姿态或第二物料的角度姿态进行调节,以使得第一物料匹配第二物料。通过将调节机构拆分成第一调节机构与第二调节机构,以独立进行角度或位移调节,不仅能降低整个设备的体积,且可以灵活选择工艺流程,降低生产成本。
[0110]
具体地,第一物料传输机构包括第一料仓模组、第一载板取料模组、第一物料取料
模组;其中,
[0111]
第一料仓模组内容置若干第一载板,第一载板上放置若干第一物料即芯片346。
[0112]
第一载板取料模组的一端连接第一料仓模组,第一载板取料模组从第一料仓模组内夹取第一载板;并将第一载板传输至指定位置。
[0113]
第一物料取料模组与第一载板取料模组相邻设置,当第一载板被第一载板取料模组夹取并传送至指定位置后,第一物料取料模组从第一载板上吸取物料并传送至第一调节机构上。
[0114]
具体地,如图3至图12所示,第一载板取料模组1包括第一载板传输模组、载板加工模组、第一载板夹取模组;其中,
[0115]
第一载板传输模组12包括第二基座121、第一驱动组件122、第一滑轨123、第一滑座125;第一滑轨123、第一驱动组件122固定安装于第二基座121上,第二基座121固定安装于第一基座100上;第一滑轨123与第一滑座125滑动连接;第一滑座125在第一驱动组件122的驱动力下沿第一滑轨123方向往复运动;
[0116]
载板加工模组11包括载板组件,载板组件上设置有用于放置第一载板14的上层容置轨道1155与下层容置轨道1156,上层容置轨道1155在竖直方向上平行下层容置轨道1156且位于其上方;
[0117]
第一载板夹取模组13包括第三基座131、第一载板夹取组件、第二驱动组件135、第二滑轨133、第二滑座;第三基座131固定安装于第一滑座125上,第一载板夹取组件与第二驱动组件135固定连接,第二驱动组件135与第二滑座固定连接;第二滑座与第二滑轨133滑动连接;第一载板夹取组件在第二驱动组件135的驱动力下沿第二滑轨133方向运动,以将载板从下层容置轨道内1156移至上层容置轨道1155内。
[0118]
如图3所示,第一载板夹取组件夹取物料至指定位置的步骤如下:
[0119]
第一步骤、第一载板夹取组件沿x轴的d方向从料仓内夹取载板并将其传送至下层容置轨道1156内,由于结构本身的原因,比如第一滑轨123的长度较短,只通过第一载板夹取组件无法将载板放置在指定位置。
[0120]
第二步骤、第一载板夹取组件在第二驱动组件135的驱动力下沿z轴方向运动至低于载板所在的平面,如图11、图12所示。
[0121]
第三步骤、第一载板夹取模组13沿第一滑轨123运动至载板的下方,如图4所示,在第二驱动组件135的驱动力下沿z轴方向向第一载板14方向运动,以将第一载板14扛起,第一载板夹取模组13夹持载板14使其一起在第一驱动组件122的驱动力下沿x轴方向运动至指定位置。
[0122]
需要说明的是:第二驱动组件135将第一载板14扛起的距离小于上层容置轨道1155与下层容置轨道1156之间的距离。
[0123]
第四步骤、第一载板夹取模组13夹持第一载板14运动至上层容置轨道1155或下层容置轨道1156的边缘处后,第一载板夹取组件夹持的第一载板14在第二驱动组件135的驱动力下沿z轴方向向靠近上层容置轨道1155方向运动,当第一载板14运动至与上层容置轨道1155同一平面时停止运动。
[0124]
第五步骤、第一载板夹取模组13在第一驱动组件122的驱动力下沿x轴方向向上层容置轨道1155运动,以使得第一载板14运动至上层容置轨道1155内。
[0125]
第六步骤、当载板14运动至上层容置轨道1155内时,第一载板夹取组件松开对载板14的夹持,并且第一载板夹取组件在第二驱动组件135的驱动力下沿z轴方向向下层容置轨道1156方向运动,第一载板夹取模组13在第一驱动组件122的驱动力下运动至上层容置轨道1155的边缘处即第一载板夹取模组13在z轴方向上与上层容置轨道1155之间有距离。
[0126]
第七步骤、第一载板夹取组件在第一驱动组件122与第二驱动组件135的驱动力下运动至与第一载板14同一水平面上,第一载板夹取组件夹持第一载板14的一端以使其运动至指定位置。
[0127]
第八步骤、第一载板14加工模组11在第五驱动组件110的驱动力下沿y轴方向将第一载板14传送至指定的工作区域。
[0128]
需要说明的是:上述第一步骤至第八步骤是将第一载板上的半成品芯片传送至aa工作区,当第一载板上的半成品芯片全部替换成成品芯片后,按相同的步骤返回至第一料仓模组1。
[0129]
在本发明的一个实施例中,如图6、图8所示,第一载板夹取组件还包括用于将载板顶起的顶板136,顶板136在第一驱动组件122与第二驱动组件135的驱动力下运动至载板的下方并将其扛起,以将载板从下层容置轨道1156移动至上层容置轨道1155。在第三步骤中,第一载板夹取模组13在第一载板的下方,第一载板夹取组件向第一载板方向运动并将其扛起时,第一载板夹取组件上的顶板136接触第一载板,并将作为第一载板的承载板。
[0130]
进一步的,第一载板夹取组件还包括夹料块137、第三驱动组件1373,夹料块137包括第一夹料块1371与第二夹料块1374,第一夹料块1371与第二夹料块1374分别位于顶板136的两端,第三驱动组件1373安装于顶板136上;第一夹料块1371在第三驱动组件1373的驱动力下向第二夹料块1374移动,以夹紧位于第一夹料块1371与第二夹料块1374之间的第一载板。第三驱动组件1373优选为气缸,夹料块137在气缸的驱动下将载板夹紧。在第四步骤中,第一载板夹取模组13夹持载板在第一滑轨123上运动,夹持载板即通过第一夹料块1371与第二夹料块1374将载板夹紧。
[0131]
在本发明的一个实施例中,第一载板夹取组件包括用于夹持载板的夹爪138、第四驱动组件1382;第四驱动组件1382安装于顶板136上,夹爪138在第四驱动组件1382的驱动力下夹取载板在下层容置轨道1156或上层容置轨道1155上移动。第四驱动组件1382优选为气缸,夹爪138在气缸的驱动力下夹取第一载板。在第一步骤、第七步骤、第八步骤中第一载板夹取组件的夹爪138夹持载板的一端使其共同运动。
[0132]
具体地,如图7所示,夹爪包括上夹爪1381,上夹爪1381与下夹爪1384相对设置;上夹爪1381固定安装于顶板136的上表面,下夹爪1384连接第四驱动组件1382并位于顶板136的下方;下夹爪1384在第四驱动组件1382的驱动力下向上夹爪1381运动,以夹紧载板14。
[0133]
在本发明的一个实施例中,在夹料块137的内侧以及夹爪的内侧设置有弹性垫,分别为第一弹性胶块1372与第二弹性胶块1383,弹性垫使得夹料块137或夹爪夹持载板的时候既能将载板夹紧且能避免伤害载板。弹性垫优选为优力胶,优力胶具有强度好,受力后压缩变形小的特点,优力胶既有塑料的刚性也具有橡胶的弹性。
[0134]
在本发明的一个实施例中,载板加工模组11包括载板组件115,载板组件115上设置有用于放置载板的上层容置轨道1155与下层容置轨道1156,上层容置轨道1155在竖直方向上平行下层容置轨道1156且位于其上方。载板加工模组11包括第二传输模组,第二传输
模组包括第四基座114、第五驱动组件110、第三滑轨116、第三滑座1157;第五驱动组件110、第三滑轨116固定安装于第四基座114上;第三滑轨116与第三滑座1157滑动连接;第三滑座1157在第五驱动组件110的驱动力下沿第三滑轨116方向做往复运动。第五驱动组件110优选为棒状电机,第三滑座1157在棒状电机的驱动力下沿y轴方向做往复运动。载板加工模组还包括底部固定板111与若干线性导向轴112、导向轴固定板113,若干线性导向轴112固定安装于底部固定板111与导向轴固定板113之间,导向轴固定板113与第四基座114固定连接以起到垫高与支撑的作用。
[0135]
在本发明的一个实施例中,如图9、图10、图12所示,载板组件115还包括固定轨道架板1158,固定轨道架板1158固定安装于第三滑座1157上;固定轨道架板1158连接上层容置轨道1155与下层容置轨道1156。
[0136]
载板组件115还包括内侧滚动条1151,内侧滚动条1151固定安装于上层容置轨道1155的内侧,内侧滚动条1151上设置有推料压板1152;当载板运动至上层容置轨道1155上时,推料压板1152抵压于载板上。在第七步骤中,夹取组件夹持载板的一端以使其运动至指定位置,在载板运动至指定位置后,内侧滚动条1151上的推料压板1152将载板进行固定。
[0137]
载板组件115还包括调节杆1153,调节杆1153垂直安装于下层容置轨道1156或上层容置轨道1155上,以调节上层容置轨道1155或下层容置轨道1156的宽度。不同载板的宽度匹配不同宽度的上层容置轨道1155或下层容置轨道1156,该调节杆1153增加载板组件115的适应性。
[0138]
如图9所示,上层容置轨道1155的上表面设置有若干均匀分布的滚动轴承1154,在载板进行回仓的过程中滚动轴承1154起到限位与输送的作用,提高载板的输送效率。
[0139]
具体地,第一物料取料模组2包括第一传送模组21、取料机构22;取料机构22包括第二传送模组221与吸料模组222;其中,
[0140]
第一传送模组21包括第十滑座215、第十四驱动组件214、第十滑轨213、第八基座211;第十滑轨213与第十四驱动组件214固定安装于第八基座211上;第十滑座215与第十滑轨213滑动连接;第十滑座215在第十四驱动组件214的驱动下沿第十滑轨213方向往复运动,第八基座211的端部设置有封板212。其中,第十四驱动组件214优选直线电机,直线电机驱动第十滑座215在水平方向上做往复运动。
[0141]
第二传送模组221包括第九基座2211、第十五驱动组件2216、第十一滑座2215、第十一滑轨2217;第九基座2211固定安装于第十滑座215的表面,以使得第二传送模组221跟随第十滑座215一起运动;第十一滑轨2217、第十五驱动组件2216固定安装于第九基座2211上;第十一滑座2215与第十一滑轨2217滑动连接;第十一滑座2215在第二驱动组2216件的驱动下沿第十一滑轨2217方向往复运动。第二传送模组221固定安装于第一传送模组21的第十滑座215上,即第二传送模组221在第十滑轨213上运动。第二传送模组221的传送方向垂直于第一传送模组21的传送方向。第十五驱动组件2216优选直线电机,直线电机驱动第十一滑座2215在竖直方向上往复运动。
[0142]
在本发明的一个实施例中,第一物料取料模组2还包括磁力弹簧2212,磁力弹簧2212固定安装于第九基座2211上;磁力弹簧2212产生弹性力的方向与第十一滑座2215的运动方向相同。磁力弹簧2212起到了缓冲减震的作用,使得第十一滑座2215在运动的过程中更加平稳。
[0143]
吸料模组222,吸料模组222包括第一固定板222a、第一取料组件、第二取料组件;第一固定板222a固定连接第九基座2211,以使得吸料模组222跟随第十一滑座2215一起运动;第一取料组件与第二取料组件分别与第一固定板222a连接;其中,
[0144]
第一取料组件或第二取料组件包括第十六驱动组件222n、第十二滑轨222g、吸嘴组件;第十六驱动组件222n、第十二滑轨222g固定安装于第一固定板222a上,吸嘴组件与第十二滑轨222g滑动连接;吸嘴组件在第十六驱动组件222n的驱动力下沿第十二滑轨222g方向往复运动,以吸取或放下物料。第一取料组件或第二取料组件的运动方向与第二传送模组221的运动方向一致均在竖直方向上运动。第十六驱动组件222n优选微型气缸,吸嘴组件在微型气缸的驱动下在竖直方向上做往复运动。
[0145]
第一取料组件与第二取料组件为两个相互独立的取料组件,第一取料组件与第二取料组件以第一固定板222a对称设置,应当理解为:第一取料组件与第二取料组件都包括第十六驱动组件222n、第十二滑轨222g以及吸嘴组件,或者说是吸料模组222包括两个对称设置的第十六驱动组件222n、第十二滑轨222g以及吸嘴组件。第十六驱动组件222n连接有主控板,主控板发送指令给第一取料组件或第二取料组件包括的第十六驱动组件222n驱动吸嘴组件吸取或者放下物料。
[0146]
本发明的实施例中的第一取料组件中的吸嘴组件与第二取料组件中的吸嘴组件单独运行,应当理解为:当第一取料组件中的吸嘴组件运动时,第二取料组件中的吸嘴组件停止运动,当第一取料组件中的吸嘴组件完成吸取或放下物料动作时,第二取料组件中的吸嘴组件开始吸取或放下物料的动作。比如:第一取料组件中的吸嘴组件在完成放下成品芯片动作后,第二取料组件中的吸嘴组件开始吸取半成本芯片。第一取料组件中的吸嘴组件与第二取料组件中的吸嘴组件分别负责吸取物料或放下物料。两个吸嘴组件独立运行,实现双工位吸附物料以增加搬运量,提高取料效率,降低取料成本。
[0147]
在本发明的一个实施例中,吸料模组222还包括摄像头组件222f与第二固定板222d,第二固定板222d与第一固定板222a固定连接,摄像头组件222f固定安装于第二固定板222d上,摄像头组件222f用于对待吸取的物料进行拍照。本实施例中的物料包括芯片,若干芯片以任意角度放置于载板上,吸嘴组件在进行吸取之前,需要通过摄像头组件222f对载板上待吸取的物料进行拍照,以使得吸嘴组件更加准确的进行吸取。另外,摄像头组件与吸嘴组件相邻设置,以方便准确采集待吸取芯片的姿态。
[0148]
具体地,吸嘴组件分别包括吸杆组件222h、移动组件;移动组件的一端固定连接第十六驱动组件222n,移动组件的另一端与第十二滑轨222g滑动连接;吸杆组件222h固定安装于移动组件上;吸杆组件222h在第十六驱动组件222n的作用下沿第十二滑轨222g方向往复运动,以吸取或放下物料。
[0149]
移动组件包括吸嘴升降板222j、移动板222m、第三固定板222b;移动板222m固定连接第十六驱动组件222n,吸嘴升降板222j与移动板222m固定连接,吸嘴升降板222j与第十二滑轨222g滑动连接;吸杆组件222h固定安装于第三固定板222b上,第三固定板222b与吸嘴升降板222j固定连接。吸嘴升降板222j、移动板222m、第三固定板222b分别固定连接不同的元件,以使得吸料模组222的结构更加灵活有利于后期维护。
[0150]
具体地,吸嘴组件还包括旋转电机222e,旋转电机222e安装于第三固定板222b上;旋转电机222e接收指令驱动吸杆组件进行旋转,以摆正物料。旋转电机222e优选空心旋转
电机,当气体进入空心旋转电机222e后,吸杆组件222h吸附物料。旋转电机222e连接主控板,摄像头组件222f将采集的带吸取芯片的姿态数据反馈给主控板,主控板经过数据处理后发送指令给旋转电机222e,旋转电机222e旋转一定角度后吸取物料,以使得吸杆组件222h将正确姿态的芯片进行吸取并进行传输至指定位置。旋转电机222e在吸取物料之前对吸杆组件222h进行旋转以使其吸取所需姿态的物料,提高物料的传送效率。
[0151]
在本发明的一个实施例中,吸嘴组件还包括弹性组件222c,弹性组件222c固定安装于移动组件上;弹性组件222c产生弹性力的方向与移动组件的运动方向相同,弹性组件222c与吸嘴升降板222j相邻设置。该弹性组件222c优选为弹簧,弹簧用于对吸杆组件222h进行缓冲减震。为了防止吸杆组件222h在吸取物料的时候对物料造成损伤,该弹性组件222c即弹簧使得吸杆组件222h在吸取物料的时候实现柔性接触。
[0152]
具体地,如图18至图23所示,第一调节机构3包括第一位移模组31、第二位移模组32、第一物料位置调节机构33、芯片治具模组34;其中,
[0153]
芯片传输机构即第一调节机构,包括第一物料位置调节机构33、第一位移模组31、第二位移模组32、芯片治具模组34;其中,
[0154]
如图19所示,第一位移模组31包括第六基座311、第七滑轨315、第八驱动组件313、第七滑座312、第一承载板314;第七滑轨315与第八驱动组件313固定安装于第六基座311上;第七滑轨315与第七滑座312滑动连接;第七滑座312与第一承载板314固定连接;第七滑座312与第一承载板314在第八驱动组件313的驱动力下沿第七滑轨315方向往复运动。第八驱动组件313优选为棒状电机,第一承载板314在棒状电机的驱动力下沿y轴方向往复运动。
[0155]
如图20所示,第二传输组件包括第八滑轨320、第八滑座327、第九驱动组件329、竖板323、第九滑轨326、第九滑座325、第十驱动组件328;第八滑轨320固定安装于第一承载板314上,第八滑座327与第八滑轨320滑动连接,第八滑座327在第九驱动组件329的驱动力下沿第八滑轨320方向往复运动。第九驱动组件329优选为棒状电机,第八滑座327在棒状电机的作用下沿x轴方向往复运动。
[0156]
竖板323垂直固定安装于第八滑座327上,第十驱动组件328与第九滑轨326固定安装于竖板323的侧面,第九滑座325与第九滑轨326滑动连接;第九滑座325在第十驱动组件328的驱动力下沿第八滑轨320的垂直方向往复运动。第十驱动组件328优选为棒状电机,第九滑座325在棒状电机的驱动力下沿z轴方向往复运动。第八滑座327上固定安装有第二承载板321,安装基座334固定安装有第二承载板321上。第二驱动组件的上方固定连接有连接板322,连接板322固定连接竖板323。
[0157]
芯片治具模组34;
[0158]
安装底座334固定安装于第九滑座325上,芯片治具模组34固定安装于第一调节板331的表面;芯片治具模组34在第八驱动组件313、第九驱动组件329、第十驱动组件328的驱动力下进行多方位运动。用于放置芯片的芯片治具在三个棒状电机的驱动下在x轴、y轴、z轴方向运动。
[0159]
在本发明的一个实施例中,还包括磁力弹簧324,磁力弹簧324固定安装于竖板323上,当第十驱动组件328停止工作时,磁力弹簧324减缓第九滑座325在重力的作用下向下运动。磁力弹簧324起到缓冲保护装置的作用,以避免元件之间的刚性接触造成损伤。
[0160]
如图23所示,芯片治具模组34包括芯片基座345、芯片固定板344、微型气接头348、
气缸驱动组件347、第十三滑轨349、传感器组件;其中,
[0161]
芯片基座345固定安装于第一调节板331上;用于放置芯片的芯片固定板344固定安装于芯片基座345上;微型气接头348安装于芯片固定板344上,用于向芯片固定板344内输入气体;气缸驱动组件347固定安装于芯片基座345上;第十三滑轨349固定安装于芯片基座345上;传感器组件在气缸驱动组件347的驱动力下沿第十三滑轨349方向运动,以接近或远离芯片固定板344。
[0162]
进一步的,传感器组件包括导轨连接块343、传感器安装板341、传感器;其中,
[0163]
导轨连接块343的一端与第十三滑轨349滑动连接,导轨连接块343的另一端连接气缸驱动组件347,在气缸驱动组件347的驱动力下导轨连接块343沿第十三滑轨349方向往复运动;传感器安装板341固定连接导轨连接块343;传感器固定安装于传感器安装板341上。气缸驱动组件347优选为气缸,导轨连接块343在气缸的驱动下沿z轴方向往复运动。传感器安装板341连接支撑连接板342,支撑连接板342位于传感器安装板341的下方。
[0164]
如图21、图22所示,根据本发明实施例的第一物料位置调节机构33,包括第一调节模组、第二调节模组;其中,
[0165]
第一调节模组包括第一调节板331、第二调节板332、第一连接件336、第一调节件333;用于放置芯片的治具固定安装于第一调节板331上;第一调节板331与第二调节板332通过第一连接件336活动连接,通过第一调节件333以调节第一调节板331与第二调节板332在水平方向上的相对位置。
[0166]
具体地,第一调节板331上设有若干固定孔,当第一调节件333完成调节后,通过固定孔将第一调节板331与第二调节板332固定连接。若干固定孔不仅将第一调节板331与第二调节板332进行固定连接还将芯片治具固定安装于第一调节板331上表面,以通过第一调节板331与第二调节板332调节芯片治具的姿态。
[0167]
本发明的一个实施例中,第二调节板332的侧边垂直延伸一侧板339,侧板339平行于第一调节板331的侧面;第一连接件336与第一调节件333的两端分别连接侧板339与第一调节板331的侧面。第一调节板331叠放在第二调节板332的表面并通过第一连接件336连接,第一连接件336优选为弹簧,弹簧连接第一调节板331与第二调节板332上的侧板339。第一连接件336为弹簧可第一调节板331与第二调节板332的侧板339发生刚性碰擦,造成损伤。第一调节件333优选为螺母,通过调节螺母以调整第一调节板331与第二调节板332之间的水平距离。
[0168]
第二调节模组包括安装底座334、用于支撑与调节的调节组件;调节组件安装于第二调节板332与安装底座334之间;通过调节组件以调节第二调节板332相对于安装底座334的姿态。安装底座334通过调节组件连接平行安装于第二调节板332的下方位置。调节组件调节第二调节板332相对于安装底座334的姿态,以满足需求。
[0169]
具体地,调节组件包括第二连接件与第二调节件338,第二调节件338与第二连接件的一端固定安装于第二调节板332的底端,另一端活动安装于安装底座334的表面。
[0170]
第二连接件包括承载钢球337与若干弹性件335,用于承载重量的承载钢球337固定安装于安装底座334上,若干弹性件335均匀分布并安装于安装底座334上。若干弹性件335起到部分支撑作用,第一调节板331与第二调节板332自身以及承载的重量主要分布于承载钢球337与第二调节件338上。若干弹性件335优选为弹簧,弹簧起到部分支撑作用还避
免了第二调节板332与安装底座334之间进行刚性接触。承载钢球337分别安装于第二调节板332的底部与安装底座334的表面,第二调节板332以承载钢球337为支点并利用第二调节件338进行任意角度的姿态调整。第二调节件338优选为转盘,旋转转盘调节第二调节板332与安装底座334之间的距离,以端平第二调节板332相对于安装基座的姿态。第一调节模组与第二调节模组分别调节芯片治具的水平位移与角度姿态,满足芯片治具的任意姿态调节。在进行aa工艺之前对芯片治具进行任意姿态调节,降低aa工艺时的对准难度同时降低了对准成本。
[0171]
具体地,如图24至图31所示,第二载板取料模组4包括第二载板传输模组41、第二料仓模组42、第二载板夹取模组43;其中,
[0172]
第二载板传输模组41包括第五基座411、第一导轨组件、第二导轨组件;第一导轨组件、第二导轨组件固定安装于第五基座411上,第一导轨组件位于第二导轨组件的下方。如图25所示,第一导轨组件、第二导轨组件安装于第五基座411的内壁上。用于夹持载盘的夹取模组在第一导轨组件上运动;载盘在夹爪组件437的夹持下在第二导轨组件上运动。
[0173]
具体地,第一导轨组件包括第七驱动组件414、第十二滑座(图中未显示)、第五滑轨413;第七驱动组件414、第五滑轨413固定安装于第五基座411内壁上,第十二滑座与第五滑轨413滑动连接;第十二滑座固定连接固定座,固定座在第七驱动组件414的驱动力下沿第五滑轨413方向做往复运动。第七驱动组件414优选为直线电机,第十二滑座在直线电机的驱动力下沿第五滑轨413的方向上往复运动。
[0174]
具体地,第二导轨组件包括第六滑座415、第六滑轨412、载盘承载板416;第六滑轨412固定安装于第五基座411内壁上,第六滑座415与第六滑轨412滑动连接;载盘承载板416固定安装于第六滑座415上,载盘承载板416上放置有第二载板419与第三载板417;第二导轨组件在第二载板夹取模组43的作用下沿第六滑轨412方向做往复运动。第六滑轨412固定安装于第五基座411的内壁上,第四滑轨436同时也安装于第五基座411的内壁上,第六滑轨412在竖直方向上位于第四滑轨436的上方。
[0175]
第二载板夹取模组43包括固定座、第四滑轨436、第四滑座433、弹性组件435、第六驱动组件434、夹爪组件437;第四滑轨436固定安装于固定座上,第四滑轨436与第四滑座433滑动连接,夹爪组件437在第六驱动组件434的驱动力下对第二料仓模组42中不同位置的第二载板419进行夹取;弹性组件435固定安装于第四滑座433上,以减小传递至夹爪组件437上的振动力。在夹取模组内设有的弹性组件435吸收电机及运行过程中产生的振动,以减小传递至夹爪组件上的振动力,避免了夹爪组件437夹持的载板上的物料出现掉落的现象。如图28所示,固定座包括滑块固定座431与夹爪固定座432,滑块固定座431与夹爪固定座432固定连接;第四滑轨436固定安装于夹爪固定座432上,滑块固定座431固定连接第十二滑座。
[0176]
在本发明的一个实施例中,夹爪组件437包括第一夹爪4371与第二夹爪4372,第一夹爪4371与第二夹爪4372相背设置;第一夹爪4371用于将第二料仓模组42内的第二载板419夹取至第二导轨组件上,第二夹爪4372用于夹取第二导轨组件上放置的第三载板417;其中,第二载板419用于放置半成品物料,第三载板417用于放置不合格品物料,如图26、图27所示。
[0177]
本发明提供的第二载板取料模组的具体传输步骤包括如下:
[0178]
第一步骤、在第六驱动组件434的驱动力下第二载板夹取模组43从第二料仓模组42内夹取第二载板419至第二导轨组件上。
[0179]
第二步骤、第二载板夹取模组43在第七驱动组件414的驱动力下带着第二导轨组件一起沿第十二滑座即第六滑轨412方向运动至指定位置即工作区域。
[0180]
第三步骤、当第二载板419上的物料被全部夹取后,需要将空的第二载板419输送至第二料仓模组42,并夹取新的装满物料的第二载板419;在将空的第二载板419输送至第二料仓模组42时,通过第二载板夹取模组43夹持住第三载板417,在第七驱动组件414的驱动下向第二料仓模组42方向运动。
[0181]
第四步骤、当第二导轨组件运动至第六滑轨412的末端时,第二载板夹取模组43松开第三载板417并夹持第二载板419以将其输送至第二料仓模组42内。
[0182]
第五步骤、第二载板夹取模组43在第六驱动组件434的驱动力下运动以夹取装满物料的第二载板419,迭代第一步骤至第五步骤。
[0183]
在第一步骤、第二步骤中第二载板夹取模组43夹持住第二载板419进行传输,传输过程中产生的振动力通过弹性组件435进行吸收,以维持第二载板419上的物料的稳定性,避免第二载板419上的物料因振动力过大而掉落。
[0184]
具体地,如图27所示,在第一步骤、第二步骤、第四步骤中第一夹爪4371夹持第二载板419;在第三步骤中第二夹爪4372夹持住第三载板417;第二载板419与第三载板417分别位于夹爪组件437的两侧,第一夹爪4371与第二夹爪4372的夹持载盘的方向相反。优选地,第二夹爪4372的数量为两个,两个第二夹爪4372分别位于第一夹爪4371的两侧;第三载板417靠近夹爪组件的一侧设置有两个凸块4171,两个凸块4171匹配两个第二夹爪4372。
[0185]
在本发明的一个实施例中,在第二步骤中,当第二载板419运动至指定位置即工作区域时,通过气缸夹紧组件418将第二导轨组件固定于第五基座411上。气缸夹紧组件418固定安装于第五基座411上,当第二载板419与第三载板417运动至工作区时,气缸夹紧组件418将第二载板419与第三载板417进行夹紧固定于第五基座411上,气缸夹紧组件418优选为旋转气缸。
[0186]
在本发明的一个实施例中,第一夹爪4371的下舌固定连接第二夹爪4372的上舌,在第六驱动组件434的驱动力下使得第一夹爪4371夹紧的同时第二夹爪4372松开。在同一个驱动组件的驱动力下实现两个夹爪的夹持功能,降低该传输机构的传输成本。
[0187]
第一夹爪4371与第二夹爪4372的内侧安装有弹性垫,弹性垫使得第一夹爪4371与第二夹爪4372夹持第二载板419与第三载板417的时候既能将第二载板419与第三载板417夹紧且能避免伤害第二载板419与第三载板417。弹性垫优选为优力胶,优力胶具有强度好,受力后压缩变形小的特点,优力胶既有塑料的刚性也具有橡胶的弹性。
[0188]
在本发明的一个实施例中,如图30、图31所示,第二料仓模组42包括料仓托盘421、料仓422、第十基座426、料仓支撑导轨组件424、驱动机构;料仓支撑导轨组件424、驱动机构固定安装于第十基座426上,料仓托盘421与料仓支撑导轨组件424滑动连接;料仓安装于料仓托盘421上,料仓托盘421在驱动机构的驱动力下在竖直方向上运动。驱动机构包括丝杆组件423、步进电机425、同步带427;同步带427分别连接步进电机425与丝杆组件423;料仓托盘421连接丝杆组件423,在步进电机425的驱动下,带动同步带427将力矩传递给丝杆组件423,丝杆组件423转动带动料仓托盘421在竖直方向上运动,以使料仓托盘421与第二导
轨组件位于同一水平面上。
[0189]
具体地,在aa工作区5包括调节机构、镜头组件54、芯片组件34、点胶机构51、图像采集机构;调节机构、点胶机构51、图像采集机构电性连接主控板,调节机构、点胶机构51接收主控板发送的指令并执行,图像采集机构将采集的数据反馈给主控板。
[0190]
具体地,图像采集机构用于采集镜头或芯片的姿态数据并将其反馈给主控板,主控板根据接收的数据进行处理后发送调节命令给镜头组件或芯片组件;图像采集机构位于镜头组件54、芯片组件34的正上方用于采集芯片346与镜头的姿态数据。
[0191]
镜头组件54包括第二载板夹爪组件542、镜头基座541,第二调节机构52与第二载板夹爪组件542安装于镜头基座541上,第二载板夹爪组件542用于夹持镜头。
[0192]
芯片组件34包括芯片治具,芯片治具用于放置并固定芯片346,芯片治具固定安装于第一调节机构3上。
[0193]
调节机构包括第二调节机构52与第一调节机构3,第二调节机构52与第一调节机构3分别电性连接主控板,第二调节机构52用于调节第二载板夹爪组件542的角度姿态即镜头的角度姿态,第二调节机构52电性连接主控板。主控板根据图像采集机构反馈的数据进行处理后发送调节指令给第二调节机构52,第二调节机构52根据接收的命令对第二载板夹爪组件542进行调节。
[0194]
第一调节机构3用于调节芯片治具的位移姿态,第二载板夹爪组件542位于芯片治具的正上方,第一调节机构3电性连接主控板。在对镜头与芯片进行主动对准即aa操作的过程中,第二载板夹爪组件542一直夹持住镜头并位于芯片的正上方,芯片346放置于芯片治具中,芯片治具安装于第一调节机构3上,第一调节机构3可对芯片治具进行x、y、z三个轴向的调整,以使得镜头与芯片346满足aa工艺中的姿态要求。
[0195]
本发明实施例的摄像头主动对准装置的对准步骤如下:
[0196]
第一步骤、第二载板夹爪组件542将镜头夹持至aa区域,芯片治具运动至aa区域。
[0197]
第二步骤、第一次aa,主控板接收图像采集机构的反馈并发送调节指令给第二调节机构52与第一调节机构3,以分别调节镜头53与芯片346的姿态;同时检查镜头53或芯片346是否为合格品,当镜头53或芯片346存在不合格品,则需要返回第一步骤。
[0198]
第三步骤、在第一调节机构3的作用下将芯片346移动至点胶机构51的正下方进行点胶操作,芯片346完成点胶后返回aa区域。
[0199]
第四步骤、第二次aa,主控板再一次接收图像采集机构的反馈并发送调节指令给第二调节机构52与第一调节机构3,以分别对镜头与芯片346的姿态进行调节。
[0200]
第五步骤、点胶机构51的固化组件对芯片与镜头之间的粘合剂进行固化,以确定镜头与芯片最终的相对位置。
[0201]
需要说明的是,在对芯片与镜头进行固化之前,点胶机构51在芯片上附着的粘合剂处于液体状态,应当理解为:芯片346与镜头可相对位移,可分别进行角度与位移的调整。当固化完成后,芯片346与镜头的相对位置不可调整。
[0202]
在本发明的一个实施例中,第二调节机构52包括第十一驱动组件521、第十二驱动组件522、第十二驱动组件522,第十一驱动组件521、第十二驱动组件522、第十二驱动组件522分别安装于镜头基座541上,第十一驱动组件521、第十二驱动组件522、第十二驱动组件522用于驱动第二载板夹爪组件542以调节镜头的三个角度姿态。第十一驱动组件521、第十
二驱动组件522、第十二驱动组件522优选为步进电机,三个步进电机接收主控板的指令以对第二载板夹爪组件542进行角度调节,以满足aa工艺的需求。
[0203]
在本发明的一个实施例中,点胶机构51包括点胶头、点胶驱动512;点胶头位于第一调节机构3的正上方,当芯片治具移动至点胶头的正下方时,点胶驱动512接收主控板发送的指令通过点胶头对芯片346进行点胶。点胶机构51固定安装于镜头基座541上,芯片治具在第一调节机构3的作用下运动至点胶头的正下方,即点胶头位于芯片346的正上方,在点胶驱动512的驱动力下点胶头在芯片上表面进行点胶操作。
[0204]
进一步地,点胶机构51还包括固化组件,固化组件包括若干固化灯513,若干固化灯513均匀分布于镜头所在平面上,若干固化灯513围绕于镜头的周围;在第五步骤中,在镜头与芯片346进行主动对准后,固化灯513接收主控板的固化指令,以对镜头与芯片346之间的粘合剂进行固化,最终固定镜头与芯片346的相对位置。
[0205]
除非另作定义,本发明中使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也相应地改变。
[0206]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1