一种移动式搅拌摩擦焊装置以及多功能加工装置的制作方法
1.本发明涉及搅拌摩擦焊领域,尤其涉及一种移动式搅拌摩擦焊装置以及多功能加工装置。
背景技术:
2.搅拌摩擦焊是一种先进的固相连接技术,较传统熔化焊相比,具有高质量、热输入小、变形小等优势,它能有效避免熔化焊中常见的气孔、裂纹等常见缺陷,因而能够实现多种金属材料的高质量焊接。基本原理是利用高速旋转的搅拌工具(如搅拌针)插入焊缝中,搅拌工具沿着焊接工件的焊缝方向移动,通过搅拌针对焊接工件的搅拌、摩擦,从而使焊接工件的材料温度升高软化达到塑性状态,在搅拌针高速旋转的带动下,处于塑性状态的焊接工件材料环绕搅拌头由前向后转移,同时静轴肩对焊缝金属的锻压作用,在热
‑
机联合作用下材料扩散连接形成致密的金属间固相连接。
3.现有的搅拌摩擦焊装置主要有传统的龙门式和机器人式。龙门式搅拌摩擦焊装置只能对工件进行一维空间、二维空间的焊接,即,仅能针对工件焊缝为一条直线或者工件焊缝在同一平面上的工件的进行焊接,焊接适用范围十分有限。机器人搅拌摩擦焊装置除了可进行一维空间和二维空间的焊缝的焊接,还可进行三维空间的复杂焊缝的焊接,即,机器人搅拌摩擦焊装置还可针对工件焊缝不在同一平面上的工件的进行焊接,但是受机器人的机械臂的运动范围影响,在对于复杂焊缝进行焊缝时,工件尺寸不能太大,即,工件尺寸需要在机器人的机械臂的运动范围内。
技术实现要素:
4.为了克服现有技术的不足,本发明的目的之一在于提供一种移动式搅拌摩擦焊装置,其能适用于更大尺寸的工件的焊接。
5.为了克服现有技术的不足,本发明的目的之二在于提供具有多种加工功能的多功能加工装置。
6.本发明的目的之一采用如下技术方案实现:
7.一种移动式搅拌摩擦焊装置,包括
8.底座;
9.移动平台;所述移动平台可运动地安装在所述移动平台上;
10.驱动机构;所述驱动机构用于驱动所述移动平台运动;
11.机器人;所述机器人安装在所述移动平台上;
12.电主轴;所述电主轴安装在所述机器人的机械臂上;
13.刀柄;所述刀柄装夹在所述电主轴上;
14.搅拌摩擦工件;所述搅拌摩擦工件装夹在所述刀柄上。
15.进一步地,所述驱动机构包括旋转电机、传动齿轮和传动齿条;所述旋转电机的机体安装在所述移动平台上;所述传动齿轮固定套设在所述旋转电机的输出轴上;所述传动
齿条安装在所述移动平台上,并与所述传动齿轮啮合。
16.进一步地,所述移动平台上开设有导槽;所述底座上设置有导轨;所述导槽与所述导轨活动且插装配合。
17.进一步地,所述底座上安装有罩设在所述导轨外的防护罩。
18.进一步地,所述底座上还安装有拖链。
19.进一步地,所述移动平台上还安装有水冷机,所述水冷机用于冷却所述电主轴。
20.进一步地,所述机器人为柔性机器人。
21.本发明的目的之二采用如下技术方案实现:
22.一种多功能加工装置,包括工具刀和上述的移动式搅拌摩擦焊装置;所述工具刀能够被所述刀柄所夹装,且所述工具刀与所述搅拌摩擦工件的功能各异。
23.进一步地,所述工具刀可为铣刀、削刀、打磨刀中的任意一种。
24.进一步地,所述底座上还设置有刀架,所述刀架能够供所述工具刀和所述搅拌摩擦工件放置。
25.相比现有技术,本发明的有益效果在于:
26.本发明通过将搅拌摩擦工件装夹在刀柄上,刀柄装夹在电主轴上,如此,电主轴可通过刀柄带动搅拌摩擦工件旋转;同时,将电主轴安装在机器人的机械臂上、机器人安装在移动平台上以及设置带动移动平台运动的驱动机构;此时,通过机器人的机械臂摆动,同时还可配合驱动机构带动移动平台运动而联动机器人运动,来实现带动搅拌摩擦工件沿工件焊缝运动,如此,在搅拌摩擦工件可插入工件内时,实现工件焊接;相比仅采用机器人带动搅拌摩擦工件运动,上述过程采用机器人与移动平台和驱动机构的配合扩大了搅拌摩擦工件的运动范围,从而可适用于更大尺寸工件的焊接。
附图说明
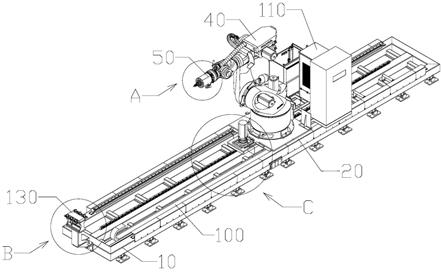
27.图1为本发明多功能加工装置的结构示意图;
28.图2为本发明局部a的结构放大图;
29.图3为本发明局部b的结构放大图;
30.图4为本发明局部c的结构放大图;
31.图中:10、底座;20、移动平台;30、驱动机构;31、旋转电机;32、传动齿条;40、机器人;50、电主轴;60、刀柄;70、搅拌摩擦工件;80、导轨;90、防护罩;100、拖链;110、水冷机;120、工具刀;130、刀架。
具体实施方式
32.如图1
‑
4所示,一种移动式搅拌摩擦焊装置,包括
33.底座10;
34.移动平台20;移动平台20可运动地安装在移动平台20上;
35.驱动机构30;驱动机构30用于驱动移动平台20运动;
36.机器人40;机器人40安装在移动平台20上,此时,机器人40随移动平台20运动而运动;
37.电主轴50;电主轴50安装在机器人40的机械臂上,此时,电主轴50随机器人40运动
而运动;具体,可将电主轴50的机体安装在机械臂上;
38.刀柄60;刀柄60装夹在电主轴50山;
39.搅拌摩擦工件70;搅拌摩擦工件70装夹在刀柄60上。
40.在上述结构的基础上,使用本移动式搅拌摩擦焊装置时,将搅拌摩擦工件70插入工件内,电主轴50带动刀柄60旋转从而带动搅拌摩擦工件70旋转,通过机器人40的机械臂摆动而带动搅拌摩擦工件70运动,同时还可配合驱动机构30带动移动平台20运动而带动机器人40运动,从而使搅拌摩擦工件70沿工件的焊缝运动,实现焊接;相比仅采用机器人40带动搅拌摩擦工件70运动,上述过程采用机器人40与移动平台20和驱动机构30的配合扩大了搅拌摩擦工件70的运动范围,从而可适用于更大尺寸工件的焊接。
41.具体地,驱动机构30包括旋转电机31、传动齿轮和传动齿条32;旋转电机31的机体安装在移动平台20上;传动齿轮固定套设在旋转电机31的输出轴上;传动齿条32安装在移动平台20上,并与传动齿轮啮合;此时,电机的输出轴旋转带动传动齿轮旋转,传动齿轮在沿传动齿条32的长度方向运动,实现移动平台20的运动;上述通过传动齿条32和传动齿轮的配合,移动平台20运动更稳定。
42.进一步地,移动平台20上开设有导槽;底座10上设置有导轨80;导槽与导轨80活动且插装配合,从而进一步提高移动平台20运动稳定性。
43.更进一步地,底座10上安装有罩设在导轨80外的防护罩90,以保护导轨80。
44.上述底座10上还安装有拖链100,拖链100可对电主轴50和机器人40等的供电线缆等提供保护。
45.进一步地,移动平台20上还安装有水冷机110,水冷机110用于冷却电主轴50,当然也可对机器人40进行冷却。
46.优选地,机器人40为柔性机器人40,其运动范围更大,以进一步增扩大本移动式搅拌摩擦焊装置的适用范围;此处需要说明地是,柔性机器人40为市场可直接采购的部件,即,其具体结构也可参照公开号为cn108818521a的现有文献。
47.本发明还公开了一种多功能加工装置,包括工具刀120和上述的移动式搅拌摩擦焊装置;工具刀120能够被刀柄60所夹装,且工具刀120与搅拌摩擦工件70的功能各异,如此,通过刀柄60选择性地夹装搅拌摩擦工件70或工具刀120,可实现对工件的焊接或者其他的加工,即,可实现对工件的不同操作,功能多样化。
48.具体地,工具刀120可为铣刀、削刀、打磨刀中的任意一种,当然,工具刀120还可为其他功能作用的刀具;当然,也可同时设置多个工具刀120,每个工具刀120的功能各不同,进一步增加本多功能加工装置的功能多样性。
49.更具体地,底座10上还设置有刀架130,刀架130能够供工具刀120和搅拌摩擦工件70放置,刀架130提供固定存放空间,摆放、更换更便捷。
50.上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1