一种使用激光划裂电池片的方法及装置与流程
1.本发明涉及一种使用激光划裂电池片的方法,尤其涉及一种使用激光划裂电池片的方法。
背景技术:
2.近年来,叠片组件技术的大力推广运用,使太阳能电池片划裂小分片技术快速发展起来。
3.因叠片组件的更高效能,各组件厂家纷纷开始生产这种叠片组件。叠片组件技术中最核心的技术是电池片的分片技术,目前现有的电池片分片技术除了采用一个激光器将电池片表面先切割出一道裂痕,再采用机械掰断的方式将太阳能电池片分割开;还运用两个激光器,第一个激光器用于将电池片划出分裂线,另一个激光器加热电池片的划裂线,同时向分裂线喷冷却介质,使电池片分裂开,如专利公开号为cn111151896a的发明专利申请公开了一种太阳能电池片的切割方法及其切割设备,专利公开号为:cn111916532a为的发明专利申请公开了一种高效分裂太阳能电池片的方法及装置,使用上述专利中公开的分片方法的过程中,发现作用到电池片上的激光束沿直线方向划裂电池片时,电池片裂开线却存在一定弧度,且在同激光束划裂同种材料电池片时,电池片裂开线的弧度方向相同,且该弧度的偏移范围在100~200μm之间,因电池片被切割分裂后,各分片的宽度尺寸变窄或变宽,用焊带互联成电池串后电池片宽度方向电池片的片间距较小,因此,将边缘带有弧度的分片焊接成电池串并封装成组件后就影响了电池串及组件的发电效率及美观性。
技术实现要素:
4.为了能清楚地说明本发明方案,便于本领域技术人员对技术方案的理解,统一对以下技术术语做如下定义。
5.理想分裂线:切分电池片后,电池片断裂面为完全水平的直线,无任何弯曲,使电池片的分裂达到理解状态。
6.轨迹线:激光束在电池片上经过的路径。
7.裂片线:激光束在电池片上沿轨迹线行走后,使电池片断裂的断裂线。
8.形变裂片线:激光束沿着与理解分裂线重合的路径在电池片上经过后,使电池片断裂的断裂线。由于电池片自身挠度形成了部分弯曲变形,以及采用专利公开号为“cn111916532a”,名称为“一种高效分裂太阳能电池片的方法及装置”中的负压吸附机构对电池片进行吸附定位时又产生了部分弯曲变形,导致激光束沿与理想分裂线重合的轨迹行走后,使电池片断裂的断裂线并不是理想分裂线,而是在电池片中部具有一定弯曲变形的曲线段。
9.本发明为解决现有技术中存在的问题,提出了一种使用激光划裂电池片的方法。
10.理想分裂线在电池片平面上,垂直于电池片栅线方向上,将电池片划分成n等份,其中n为大于等于2的自然数;
11.使激光束的焦点落于电池片的理想分裂线的o点上,按照轨迹线走向理想分裂线的a点,对电池片进行划裂;其中,在所述电池片所在平面建立坐标系,以激光束的焦点在理想分裂线的起点o为原点,o点至a点的连线为y轴,通过原点,平行于电池片栅线的直线为x轴,所述轨迹线为xy坐标系上激光束的焦点从o点移动至a点所经过的路径,所述裂片线的轨迹为xy坐标系上电池片中裂开线的路径。
12.进一步地,在所述xy直角坐标系内的确定c、e、f、d四点,沿着o、c、e、f、d、a划裂电池片的轨迹线包括:直线段0c,弧线段ce,直线段ef,弧线段fd,直线段da。
13.进一步地,所述任一轨迹线上除了与理想分裂线重合的oc段和da段以外,cefd段各点均位于电池片上的理想分裂线的另一侧,且形状为形变裂片线的镜像曲线。
14.进一步地,位于电池片的同一横截面处,所述裂片线距离所述理想分裂线的距离小于50μm。
15.根据上述方法,进一步提出四种使用上述方法对电池片进行划裂的装置,四周装置的共同之处在于,该装置包括:发射激光束的激光器和承载电池片的吸附定位台。
16.不同之处在于,第一种装置中,激光器固定不动,其射出的激光束在xz平面内与z向夹角为β,吸附定位台安装在yz向移动机构上,yz向移动机构具有同时在y向和z向移动的功能。
17.第二种装置中,激光器和吸附定位台各自安装在x向移动机构或y向移动机构上。
18.第三种装置中,激光器安装在xy向移动机构上,吸附定位台固定不动,xy向移动机构具有同时在x向和y向移动的功能。
19.第四种装置中,激光器固定不动,吸附定位台安装在xy向移动机构上,xy向移动机构具有同时在x向和y向移动的功能。
20.yz向移动机构或xy向移动机构均由x向移动机构,y向移动机构和z向移动机构中的两种单向移动机构组合而成。而各单向移动机构优先采用可靠性、精度高,控制准确的丝杆传动机构;其次、还可以选择偏心轮传动机构,或气缸传动,或带传动。
21.本发明的技术效果在于:本发明通过改变电池片在裂片时,使激光束划裂电池片时所走的路线不再是一条直线,而是可以根据实际情况,同时使激光束的焦点在电池片表面同时进行y向和x向的移动,利用x向较小的位移进行插补式的移动,改变裂片路径。
22.本发明使用轨迹线ocefda表示激光裂片路径,轨迹线的形态根据按现有技术裂片时所形成的形变裂片线反应拟合而成,通过现有技术下切片结果的大量分析,发现现有技术所形成的实际裂片线上偏离理想分裂线的各点均偏向没有对电池片进行吸附定位的一侧,因此为了纠正这种偏差,在切片前就以相同的偏离幅度,相反的偏离方向设计轨迹线ocefda作为激光划过电池片的路径,使实际裂片线相对于理想分裂线的最大误差小于50μm。保证电池片被分裂成分片后,各分片大小尺寸一致,外形一致,消除分片边缘的弧度,使分片用焊带互联焊接成串及封装成组件后,具有更高发电效率。
附图说明
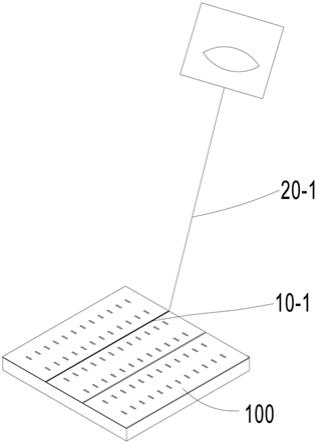
23.图1是激光束切割电池片的示意图;
24.图2是电池片被理想分离线分割的俯视图;
25.图3是电池片上激光束所走的轨迹线俯视图;
26.图4是电池片被激光束按理想分裂线分割后的裂片图;
27.图5上电池片上形变裂片线和轨迹线的俯视图;
28.图6电池片被激光束按轨迹线分割后的裂片图;
29.图7是使用激光束划裂电池片的装置;
30.图8示意了使用激光束以β角的方式划裂电池片的机构。
31.图中,20.激光器,40.吸附定位台,100.电池片,10-1.理想分裂线,10-2.裂片线,10-3.形变裂片线,20-1.激光束,20-2.轨迹线。
具体实施方式
32.下面结合图1至图8对本发明的具体实施方式进行说明。
33.图1和图2以三分片示意了激光束作用于电池片上的情景,理想分裂线10-1在电池片100平面上,垂直于电池片100栅线方向上,将电池片100划分成n等份,其中n为大于等于2的自然数;
34.图3示意了以任一条理想分裂线的端点之一为原点,在所述电池片100所在平面建立坐标系,以激光束20-1的焦点在理想分裂线10-1的起点o为原点,o点至a点的连线为y轴,通过原点,平行于电池片100栅线的直线为x轴,所述轨迹线20-2为xy坐标系上激光束20-1的焦点从o点移动至a点所经过的路径;在所述xy直角坐标系内的确定c、e、f、d四点,沿着o、c、e、f、d、a划裂电池片100的轨迹线20-2包括:直线段0c,弧线段ce,直线段ef,弧线段fd,直线段da。
35.图4示意了使用现有技术划裂电池片100时,产生的形变裂片线10-3的形状,形变裂片线10-3由激光束20-1沿着理想分裂线10-1切割电池片100后,其焦点在电池片100表面留下的裂片轨迹;将形变裂片线10-3表示为一条经过o、c、p、d、a各点的路径,任一形变裂片线10-3上除了与理想分裂线10-1重合的oc段和da段以外,cpd段各点均位于电池片100上的理想分裂线10-1的一侧。
36.图5示意了将形变裂片线10-3和轨迹线20-2放在一个坐标系中的情景,c、e、f、d各点位置源于形变裂片线10-3的路径的拟合,任一轨迹线20-2上除了与理想分裂线10-1重合的oc段和da段以外,cefd段各点均位于电池片100上的理想分裂线10-1的另一侧,且形状为形变裂片线10-3的镜像曲线;p点与ef直线段上各点相对于与理想分裂线10-1的偏离距离均为100μm-200μm。
37.图6示意了按轨迹线20-2切割电池片100后,位于电池片100的同一横截面处,所述裂片线10-2距离所述理想分裂线10-1的距离小于50μm。
38.图7示意了将上述方法进行应用时,产生激光束20-1的激光器和承载电池片100的吸附定位台在立体坐标系xyz中的运动关系。
39.图8示意了激光束20-1以β角切割电池片时,产生激光束20-1的激光器20为固定设置,电池片在yz向移动机构的带动下进行移动。
40.工作原理:由于激光切割太阳能电池片100时,由于电池片100的部分在工作台定位吸附作用下,会发生一定的变形,导致经过切割后的电池片100的形变裂片线10-3存在一定弧度,为了纠正这种弧度,在切割的时候,上述弧度的偏离程度,在相反的偏离方向上使用激光沿着轨迹线20-2划裂电池片,从而抵消电池片因定位吸附变形而产生的弧形形变裂
片线10-3,使裂片线10-2基本与理想分裂线10-1重合,最大偏差控制在50μm以内。
41.确定轨迹线20-2需要对现有技术中划裂的电池片100进行大量研究,使用专业的设备对形变裂片线10-3进行数据分析,最终以建立平面坐标系的方式,在坐标系上拟合出ocefda六个点表示激光裂片路径上的关键点,用线段将6个点依次连接,形成轨迹线20-2,其中,0c、ef、da为直线段,ce、fd为弧线段。弧线段可以为圆弧,或椭圆弧,或渐开线,或双曲线中的一种,需要根据形变裂片线10-3的形态进行拟合后,选择一种最接近的弧线形态,已达到抵消偏差的目的。
42.实现激光划裂电池片所用的装置主要目的在于使焦点在x向和y向同时移动,因此,总结出四种实现该方法的装置,第一种利用激光束在xz平面内与z轴的夹角β,在电池片沿着y向移动的同时,在z向也进行移动,改变焦点位置,以实现沿着轨迹线20-2划裂电池片。
43.其余三种装置,或将激光器20固定位置不变,吸附定位台40安装在xy移动机构上;或将吸附定位台40固定位置不变,激光器20安装在xy移动机构上;或将激光器20和吸附定位台40各自安装在x向移动机构或y向移动机构上。
44.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1