激光-电弧多枪协同增材制造飞机承力框的方法及产品
激光
‑
电弧多枪协同增材制造飞机承力框的方法及产品
技术领域
1.本发明属于増材制造相关技术领域,更具体地,涉及一种激光
‑
电弧多枪协同增材制造飞机承力框的方法及产品。
背景技术:
2.承力框是飞机机体的重要组成部分,起到主要承载作用。具有较多的加强筋与交叉特征,目前主要采用的制造方法为锻造与数控加工的方式,材料利用率低,生产周期长。
3.电弧增材制造以一种以丝材为原料,电弧为热源的增材制造方式。具有周期短,能耗低,材料利用率高等优点,特别适合制造大型复杂零件,在航空航天行业具有广泛的应用前景。
4.单一电弧成形铝合金时,电弧不稳定,成形形貌较差,气孔较多,成形效率较低,而单个打印头也存在效率低下,变形较大等问题。因此有必要针对飞机承力框的成形,开发一种激光
‑
电弧多枪协同增材制造的方法。
技术实现要素:
5.针对现有技术的以上缺陷或改进需求,本发明提供了一种激光
‑
电弧多枪协同增材制造飞机承力框的方法及产品,通过采用激光
‑
电弧复合的増材制造方法成形具有多个加强筋和交叉特征的飞机承力框结构,有效解决了飞机承力框的成形问题,满足了飞机承力框结构成形精度需求。
6.为实现上述目的,按照本发明的一个方面,提供了一种激光
‑
电弧多枪协同增材制造飞机承力框的方法,所述飞机承力框中的上表面和下表面上分布着多个加强筋和交叉结构,该飞机承力框的制备方法包括下列步骤:
7.s1对于飞机承力框的几何模型,将其分割为三层,包括中间的板状结构和上下两层加强结构,对于上下两层的加强结构,先将其进行分区,然后对于每个区域中的加强筋和交叉结构分别规划其成形轨迹;
8.s2选取成型基板作为中间的板状结构,采用夹具将所述基板固定,按照步骤s1中规划的成形轨迹,采用多组激光
‑
电弧协同复合増材制造的方式在所述基板的上表面和下表面上分区成形,以此在所述基板的上下表面获得加强结构;
9.s3将步骤s2形成带有加强结构的基板以及固定该基板的夹具一同进行固溶
‑
时效热处理,然后退火,拆除所述夹具,机加工,以此获得所需的飞机承力框。
10.进一步优选地,在步骤s1中,对于加强筋成形轨迹采用下列方式规划,首先获取该加强筋的中轴线,将该中轴线进行等距偏移,以此获得多条平行轨迹,该多条平行轨迹即为所需的成形轨迹。
11.进一步优选地,在步骤s2中,对于交叉特征的成形轨迹按照下列方式规划,在两条或者多条筋相交的交叉处,在其中一条筋a的末端规划一端平行于其他筋的成形轨迹,作为筋a成形轨迹的延伸,以此实现交叉特征成形轨迹的规划。
12.进一步优选地,在步骤s2中,所述基板的材料为2219铝合金,厚度为20mm~50mm,热处理态为o态。
13.进一步优选地,在步骤s2中,所述激光
‑
电弧协同成形的过程中,所述焊枪与基板垂直,激光倾斜放置。
14.进一步优选地,所述激光与成形平面夹角为40
°
~60
°
,功率1kw~3kw可调,波长1080
±
5nm,光斑长轴为6mm~10mm,短轴为4mm~6mm,离焦量为150mm~200mm,光丝距为
‑
2mm~2mm。
15.进一步优选地,在步骤s2中,在激光
‑
电弧协同成形的过程中,当完成一个切片层的加工后,采用线激光进行扫描提取该切片层的外轮廓,与其三维模型进行比较,当出现轮廓偏移时,对成形轨迹进行调整,当出现凹陷或凸起时,进行补焊或铣削。
16.进一步优选地,在步骤s2中,在激光
‑
电弧协同成形的过程中,采用红外热像仪进行切片层层间温度监测,使得层间温度控制在120℃~180℃。
17.按照本发明的另一个方面,提供了一种上述所述的方法制备获得产品。
18.总体而言,通过本发明所构思的以上技术方案与现有技术相比,具备下列有益效果:
19.1.本发明采用激光
‑
电弧多枪协同增材制造的方法成形飞机承力框,该飞机承力框结构上下表面设置有多个加强筋和交叉特征,使得采用现有的増材制造方法难以成形其结构特征,本发明中将其分为三层,选取基板作为中间层,在基板上成形上下表面的加强结构,使得上下表面的加强筋和交叉特征得以成形,另外,在热处理过程中保持夹具夹住基板,避免热处理过程中基板变形,直至热处理结束后取下夹具,以此获得的飞机承力框结构稳固,成形精度高;
20.2.本申请中采用激光
‑
电弧复合热源具有稳定的电弧,能有效改善成形形貌,减少气孔,提高制件力学性能;多枪协同能够有效提高成形效率,改善残余应力分布,减少变形的作用;
21.3.本申请中对于加强筋的结构采用提取中轴线后进行偏移的算法进行路径规划,交叉特征采用端部延伸的路径策略来消除未熔合缺陷,改善焊道形貌,以此成形的飞机承力框结构稳固;
22.4.本发明在成形过程中对于每个切片层提取外轮廓与三维模型进行比对,实时检测成形精度,避免最终获得的产品成形精度低,超出预设范围,确保成形的精度。
附图说明
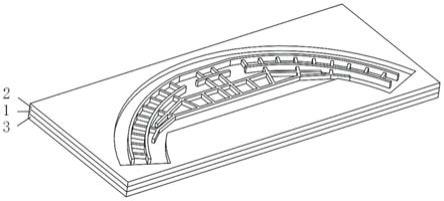
23.图1是按照本发明的优选实施例所构建的飞机承力框的结构示意图;
24.图2是按照本发明的优选实施例所构建的飞机承力框成形过程示意图;
25.图3是按照本发明的优选实施例所构建的飞机承力框上的特征示意及轨迹规划示意图。
26.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:
[0027]1‑
基板,2
‑
上半部分夹具,3
‑
下半部分夹具,4
‑
焊枪ⅰ,5
‑
焊枪ⅱ,6
‑
激光输出头ⅰ,7
‑
激光输出头ⅱ,8
‑
基板上侧成形部分,9
‑
基板下侧成形部分,10
‑
红外热像仪,11
‑
线激光,12
‑
加强筋特征外轮廓,13
‑
中轴线,14
‑
中轴线进行等距偏移得到的成形路径,15
‑
交叉特征
外轮廓,16
‑
端部横向延伸成形路径。
具体实施方式
[0028]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0029]
本发明提出了一种激光
‑
电弧多枪协同复合增材制造飞机承力框的方法,该方法使用多个激光
‑
电弧复合热源,采用多枪协同的方式实现飞机承力框的复合增材成形。
[0030]
进一步的,所述电弧为冷金属过渡,所述激光连续光纤激光,所述飞机承力框材料为铝合金。
[0031]
进一步的,基板作为零件的一部分,分别在其两侧进行成形,基板厚度为20mm~50mm厚,基板太薄容易在成形过程中产生变形,基板太厚则会在后续整体机加工时造成浪费。热处理态为o态,即未进行热处理,以便基板与增材成形部分一起进行热处理。工装与基板成形中可实现翻面与重复定位。进一步的,电弧焊枪垂直于成形平台,激光输出头与成形平面夹角约为40
°
~60
°
,此时激光光斑呈现椭圆形,连续光纤激光器功率为1kw~3kw,波长1080
±
5nm,激光功率太小则热输入不够,激光电弧复合效果不明显,激光功率过大则会使焊道流淌,同时激光功率过大也会通过基板反射后损伤其它元器件。离焦量为150mm~200mm,离焦量由激光输出头焦距和安装位置决定,离焦量越大激光光斑越大。光斑长轴为6mm~10mm,短轴4mm~6mm,一般保持光斑长轴与单个焊道的宽度近似,以保证激光对熔池的作用均匀。光丝距为
‑
2mm~2mm,激光与电弧距离太远激光则无法作用于熔池上。
[0032]
进一步的,同时采用多个激光
‑
电弧复合热源进行成形,运动平台为机床
‑
机器人平台或多机器人平台。
[0033]
进一步的,承力框中的加强筋特征采用提取中轴线并进行等距偏移的方式进行路径规划,承力框中接头特征,采用端部横向延伸的路径策略进行成形。
[0034]
进一步的,采用多枪协同对称成形的路径策略进行成形。
[0035]
进一步的,采用线激光实时进行轮廓对比,当轮廓发生偏移时采取铣削与补焊的方式进行处理。
[0036]
进一步的,采用红外热像仪进行缺陷检测与层间控温,层间温度在120℃~180℃之间。
[0037]
进一步的,成形后不拆除夹具,成型件与工装一起进行热处理。
[0038]
本发明使用多个激光
‑
电弧复合热源,采用多枪协同的方式实现飞机承力框的复合增材成形,优化了单一电弧成形工艺,高效高质量的完成承力框的复合增材制造。
[0039]
其中所用电弧为冷金属过渡,所用激光为连续光纤激光,承力框的沉积材料为2319铝合金。
[0040]
如图2所示,其中包括两组激光
‑
电弧成形机构,包括焊枪ⅰ4,焊枪ⅱ5,激光输出头ⅰ6,激光输出头ⅱ7,红外热像仪10,线激光11,1为基板,材料为2219铝合金,基板将作为零件的一部分,材料分别在基板两侧进行沉积,8为基板上侧成形部分,9为基板下侧成形部分,基板厚度为20~50mm厚,热处理态为o态,如图1所示,飞机承力框呈左右对称结构,其中
设置有过个加强筋和交叉特征,基板两侧均有工装夹具,包括上半部分夹具2和下半部分夹具3,将需要打印的区域露出方便打印,成形时工装可实现翻面与重复定位。
[0041]
本发明中激光
‑
电弧复合工艺不同于常规激光
‑
电弧焊接,常规激光
‑
电弧复合激光与基板保持垂直或近似垂直,焊枪倾斜放置,成形过程中产生匙孔,熔深较深,适用于焊接。本发明中的激光
‑
电弧复合工艺为焊枪垂直于成形平台,而激光光源倾斜射入,具有稳定电弧,增大沉积效率,减少气孔,提高制件力学性能的作用,激光输出头与成形平面夹角约为40
°
~60
°
,功率为1kw~3kw,波长1080
±
5nm,光斑长轴为6mm~10mm,近似为单个焊道的宽度,短轴4mm~6mm,离焦量为150mm~200mm,光丝距为
‑
2mm~2mm。
[0042]
本发明采用多个激光
‑
电弧复合热源进行成形,运动平台为机床
‑
机器人平台或多机器人平台。运动平台至少需要两个独立的运动机构,以满足多个打印头同时打印的要求。
[0043]
如图3所示,承力框中存在大量加强筋特征,加强筋一般为薄壁结构,成形轨迹一般平行于加强筋的方向,采用提取中轴线并进行等距偏移的方式进行路径规划,12为提取的部分加强筋的外轮廓,13为中轴线,14为由中轴线进行等距偏移得到的成形路径。同时承力框中具有较多的交叉特征,15为交叉特征外轮廓,16为端部横向延伸成形路径,采用端部横向延伸的路径策略进行成形,端部横向延伸为是指成形轨迹在交叉处不进行启停,而是平行于与之交叉的路径延伸一段距离,从而避免起弧点和熄弧点发生在交叉特征处。相邻层间起弧与熄弧交错分布,轨迹方向也进行调换,从来保证交叉接头处的平整。
[0044]
承力框采用多枪协同对称成形的路径策略进行成形,两个复合热源采取对称的策略进行成形,由于热源对称,可以减小温度梯度,进一步的可减少残余应力与变形。
[0045]
本发明采用线激光实时进行轮廓对比,每层沉积完成后,使用线激光进行扫描,在上位机软件中对点云数据进行处理,提取外轮廓,与承力框cad模型的外轮廓进行对比,若发现轮廓的偏移,可对成形路径进行调整,当出现较大凹陷与凸起等缺陷时,则进行补焊与铣削。
[0046]
本发明采用红外热像仪进行温度记录与层间控温,红外热像仪的安装位置需保证整个零件在红外热像仪视场内,层间温度一般保持在120℃~180℃之间。
[0047]
待零件成形后不拆除夹具,成型件与工装夹具同时进行固溶
‑
时效热处理,待零件机械加工后再进行退火热处理以消除加工应力,退火后拆除夹具。
[0048]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1