用于机器人固定焊接工位烟尘收集的集烟罩机构的制作方法
1.本实用新型涉及烟尘收集处理技术领域,特别涉及一种用于机器人固定焊接工位烟尘收集的集烟罩机构。
背景技术:
2.随着中国经济的持续快速发展,城市进程和工业化进程的不断增加,环境污染日益严重,国家对环保的重视程度也越来越高。目前焊接工位烟尘收集方式主要有固定式集烟罩、移动集烟罩、旋转集烟罩等方式。固定式集烟罩适合小工件、轻工件,不需要机械设备吊装的情况;移动集烟罩、旋转集烟罩适合大件、重工件。但对于一台机器人,两个焊接工位的情况,工位安装紧凑,焊接时能够罩住焊接工件,焊接准备时,又方便工件吊装、安置工作;上述工作情况,则没有合适的集烟罩应用。
3.固定式集烟罩无法实现两个工位的集尘;由于本身操作空间小,移动集烟罩的设置则存在资源浪费的情况;而现有的旋转集烟罩在旋转时,罩子也会跟着旋转一定角度,这样罩子不能有效的罩住焊接工位;如果需要把整个焊接工位罩住,则需要更大的集烟罩,这样的集烟罩不仅现场空间不需要,还增加了成本。
技术实现要素:
4.本实用新型为了弥补现有技术的不足,提供了一种占用空间小、生产成本低、使用效果好的用于机器人固定焊接工位烟尘收集的集烟罩机构。
5.本实用新型是通过如下技术方案实现的:
6.一种用于机器人固定焊接工位烟尘收集的集烟罩机构,包括立柱,其特征在于:所述立柱顶端安装有旋转轴,旋转轴固定连接旋转臂的一端,旋转臂的另一端安装有开口向下的集烟罩;旋转臂下方设置有固定电机的支架,电机的输出轴连接旋转轴;旋转轴顶端设置有定位支架,定位支架上连接有定位杆,定位杆通过连杆连接集烟罩。
7.本实用新型通过旋转臂和集烟罩的安装,实现了集烟罩的旋转功能,同时为了防止集烟罩跟着旋转臂旋转,在集烟罩上连接定位杆,定位杆通过连杆机构,保证集烟罩在焊接工位上移动时始终保持同一姿势,实现了烟尘的全面收集。
8.本实用新型的更优技术方案为:
9.所述集烟罩顶端安装有横向铺设的固定支架,固定支架的中心位置安装有衔接轴,衔接轴连接在旋转臂的端头上;连杆与固定支架在对称分布在衔接轴两侧的衔接点上固定连接,实现了集烟罩在衔接轴上的相对固定,防止其转动。
10.所述电机的输出轴通过轴承和传动轴连接旋转轴,实现电机输出轴的转向和动力输出;电机的开关上安装有继电器,将继电器的频率设定为与机器人的操作频率相同,则集烟罩的转向与机器人的操作同步,便于实现烟尘的完全收集。
11.所述立柱底部设置有大圆盘,大圆盘上均匀开设有固定预埋件的孔,大圆盘通过筋板焊接连接立柱,实现了立柱在地面上的固定预埋。
12.所述集烟罩顶端连接有烟尘输送管,将集烟罩收集的烟尘进行统一的回收处理。
13.所述立柱由大口径厚壁圆管焊接而成;旋转臂由工字型钢焊接而成;集烟罩采用型材方管和钣金件焊接而成,装置整体重量轻、强度高。
14.所述集烟罩为倒漏斗状结构,其俯视面为方形,便于对整个工位进行覆盖。
15.本实用新型结构简单,设计合理,罩体外形尺寸小,可有效节约设备成本,节省客户设备安置空间,满足机器人两个焊接工位焊接时的的烟尘收集功能。
附图说明
16.下面结合附图对本实用新型作进一步的说明。
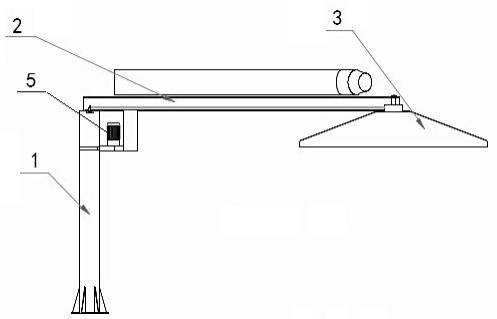
17.图1为本实用新型的主视结构示意图;
18.图2为本实用新型的俯视结构示意图;
19.图3为本实用新型的使用状态结构示意图。
20.图中,1立柱,2旋转臂,3集烟罩,4定位杆,5电机,6连杆,7旋转轴。
具体实施方式
21.为了更充分的理解本实用新型的技术内容,下面结合具体实施例对本实用新型的技术方案作进一步介绍和说明。
22.本实用新型主要由立柱1、旋转臂2、集烟罩3及定位杆4构成。
23.本实用新型中,立柱1顶端安装有旋转轴7,旋转轴7固定连接旋转臂2的一端,旋转臂2的另一端安装有开口向下的集烟罩3;旋转臂2下方设置有固定电机7的支架,电机7的输出轴连接旋转轴7;旋转轴7顶端设置有定位支架,定位支架上连接有定位杆4,定位杆4通过连杆6连接集烟罩3。
24.立柱1主要采用大口径厚壁圆管焊接而成,立柱1底部采用大圆盘和筋板与立柱1焊接,圆盘上均匀开孔,用于立柱1与预埋件的固定。旋转臂2主要采用工字型钢焊接而成,保证强度,支撑集烟罩3。集烟罩3采用型材方管和钣金件焊接而成,重量轻、强度高。定位杆4采用连杆机构连接集烟罩3,保证集烟罩3在旋转的同时,集烟罩3不旋转,始终保持一个姿态,在焊接工位上移动,四边始终与焊接工位平行,保证集烟罩2能够罩住焊接工位。
25.本实用新型利用旋转集烟罩3对焊接烟尘收集时,采用小罩子就能实现大罩子才能对焊接工位罩住吸收焊接烟尘的效果,来满足机器人两个焊接工位焊接时的烟尘收集功能。
26.集烟罩3的位置移动通过电机5对旋转轴4的动力输出来实现,从而带动旋转臂2旋转,电机5上设置有继电器,继电器的开关频率与机器人的换位操作频率相同,则集烟罩3的位置旋转变动与机器人同步,实现了烟尘收集的有效性。
27.以上所述仅以实施例来进一步说明本实用新型的技术内容,以便于本领域技术人员更容易理解,但不代表本实用新型的实施方式仅限于此,任何依本实用新型所做的技术延伸或再创造,均受本实用新型的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1