机械手臂控制的加工中心自动上下料系统的制作方法
[0001]
本实用新型涉及上下料设备技术领域,尤其涉及一种机械手臂控制的加工中心自动上下料系统。
背景技术:
[0002]
在如今的加工中心等设备生产过程中,上料下料、检测、清洁等工序一般是采取两种方式。一种是使用人工进行的,这种方式属于最传统的工艺流程,自动化水平低,效率低,并且对各个岗位的操作人员技术水平要求较高,产品不良率较高。另一种常见的自动化处理工艺,是采用增加了中央处理器、控制器、plc(可编程逻辑控制器)等装置的处理方式,这种做法是将加工中心、机械手臂、视觉等装置的信息,集中汇总到中央处理器、控制器、plc等控制单元,由这些控制单元进行信号处理后,再分别控制其他各个动作单元。这种控制方式在整体设计上难度较大,程序复杂,并且由于增加了中央处理器等装置,成本较高。
技术实现要素:
[0003]
本实用新型的目的在于克服上述技术的不足,而提供一种机械手臂控制的加工中心自动上下料系统。
[0004]
本实用新型为实现上述目的,采用以下技术方案:一种机械手臂控制的加工中心自动上下料系统,其特征在于:包括工业机械手臂、加工中心、直驱转台、示教显示器、上料托盘、下料托盘、视觉检测装置和吹气清洁装置;所述工业机械手臂分别与所述加工中心、直驱转台、示教显示器、上料托盘、下料托盘、视觉检测装置和吹气清洁装置信号连接。
[0005]
本实用新型的有益效果是:全程的自动化流程,最大程度节约人力,效率高,不良品率低。依靠工业机器人的高精度动作,准确保证各个动作环节准确到位。利用工业机器人自身携带的控制功能,进行全方位信号处理,简单快捷。不需要增加中央处理器、控制器、plc等相关处理器,节约成本。减小安装难度,减少安装时间,更容易操作。安装后的导轨更精密,可安装长度更广。
附图说明
[0006]
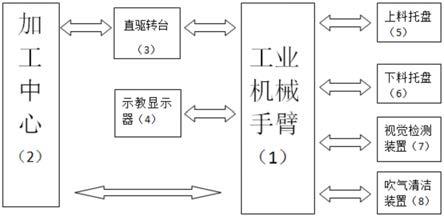
图1为本实用新型的结构示意图;
[0007]
图2为本实用新型的电路原理图。
具体实施方式
[0008]
为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器或特征与其他器或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器被倒置,则描述为“在其他器或构造上方”或“在其他器或构造之上”的器之后将被定位为“在其他器或构造下方”或“在其他器或
构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
[0009]
如图1所示,一种机械手臂控制的加工中心自动上下料系统,包含:工业机械手臂1、加工中心2、直驱转台3、示教显示器4、上料托盘5、下料托盘6、视觉检测装置7和吹气清洁装置8。如图2,所述工业机械手臂1作为整体系统的核心,第一,与加工中心2进行直接信号连接,涉及到的信号包含:加工开始、暂停、停止信号,加工中心2的开关门信号。第二,工业机械手臂1与示教显示器4进行信号连接,涉及功能包含:整体程序编写、状态监控、手动操作等内容。第三,工业机械手臂1与直驱转台3进行信号连接,涉及到的信号包含:直驱转台3的松开与锁紧信号、旋转与到位信号。第四,工业机械手臂1与上料托盘5和下料托盘6进行信号连接,涉及功能包含:上料到位信号、下料放满信号。第五,工业机械手臂1与视觉检测装置7进行信号连接,涉及的功能为:视觉检测开始/关闭信号、检测结果信号。第六,工业机械手臂1与吹气清洁装置8相连接,实现控制吹气装置进行吹气清洁的效果。通过机械手臂的运动能力,实现物料的搬运,将被生产物料逐一运送至加工中心、视觉检测装置、吹气清理装置等。同时,运用机械手臂自身携带的i/o信号功能,以机械手臂为整体信号的处理核心,来控制各个加工模块的整体运动模式,快捷、有效。运行程序在机械手臂运动程序内部即可提现,省去了单独编写其他控制模块程序的步骤,因此使用上更加简单,信号传输更加快捷、直接。
[0010]
如图1,整体使用方法及步骤:先由工业机械手臂1从上料托盘5取得取料,放入加工中心2进行加工。加工完毕后,由工业机械手臂1取出并放入吹气清洁装置8进行清洁。然后有工业机械手臂1取出放入视觉检测装置7进行品质检验,检验后由工业机械手臂1取走,放入下料托盘6。加工中心2同时与直驱转台3进行信号交互,由此来控制加工工艺。整个过程中通过示教显示器4对各个环节的状态进行监控。
[0011]
以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1