一种激光焊接工件用定位机构的制作方法
1.本实用新型涉及激光焊接技术领域,具体为一种激光焊接工件用定位机构。
背景技术:
2.激光焊接可以采用连续或脉冲激光束加以实现,激光焊接的原理可分为热传导型焊接和激光深熔焊接。其中热传导型激光焊接原理是激光辐射加热待加工表面,表面热量通过热传导向内部扩散,通过控制激光脉冲的宽度、能量、峰功率和重复频率等激光参数,使工件熔化,形成特定的熔池。激光深熔焊接一般采用连续激光光束完成材料的连接,其冶金物理过程与电子束焊接极为相似。激光焊接过程中往往需要用到定位机构,定位机构可防止工件移动。
3.目前,现有的激光焊接工件用定位机构效率低易松动,不可水平移动,实用性不佳,且不易拆卸清洗,耗时耗力,无法满足实际使用中的需求,所以市面上迫切需要能改进的技术,以解决上述问题。
技术实现要素:
4.(一)实用新型目的
5.为解决背景技术中存在的技术问题,本实用新型提出一种激光焊接工件用定位机构,具有效率高、稳定性高、可水平调节和可拆卸清洗的特点。
6.(二)技术方案
7.为解决上述技术问题,本实用新型提供了一种激光焊接工件用定位机构,包括定位板,所述定位板的前端从左到右依次固定有第一固定弧板、第一夹紧机构、第二夹紧机构和第二固定弧板,且定位板的后端固定有移动块,所述移动块上固定有螺栓,且螺栓从前到后穿过定位板上开设的第一安装孔和移动块上开设的第二安装孔后与螺母固定连接,所述移动块固定在水平移动组件上。
8.进一步的,所述第一夹紧机构和第二夹紧机构都包括固定座、t型螺杆和移动弧板,所述移动弧板上固定有第一轴承,且移动弧板通过第一轴承与t型螺杆转动连接。
9.进一步的,所述固定座上开设有螺纹旋孔,且固定座通过螺纹旋孔与t型螺杆转动连接。
10.进一步的,所述固定座固定在定位板上,所述固定座上对称位置固定有限位管,且限位管与移动弧板上固定的限位杆套接连接。
11.进一步的,所述水平移动组件包括壳体,所述壳体的内壁固定有第二轴承,且壳体通过第二轴承与丝杆转动连接。
12.进一步的,所述丝杆与移动块螺纹连接,且丝杆与壳体上端固定的伺服电机的输出端固定连接。
13.进一步的,所述壳体的左右端对称位置设置有垫片,且垫片上对称位置开设有通孔。
14.本实用新型的上述技术方案具有如下有益的技术效果:本实用新型设置的定位板的前端从左到右依次固定有第一固定弧板、第一夹紧机构、第二夹紧机构和第二固定弧板,通过第一固定弧板和第一夹紧机构的配合可夹紧一个工件,而通过第二夹紧机构和第二固定弧板可夹紧另一个工件,同时可激光焊接两个工件,效率高,而本实用新型设置的固定座上对称位置固定有限位管,且限位管与移动弧板上固定的限位杆套接连接,通过限位管和限位杆的配合起到矫正的效果,防止移动弧板偏离位置,稳定性高,然后本实用新型设置的螺栓从前到后穿过定位板上开设的第一安装孔和移动块上开设的第二安装孔后与螺母固定连接,通过扳手可拆卸螺母和螺栓,而通过拆卸螺栓和螺母即可分离定位板和移动块,便于清洗,省时省力,最后本实用新型设置的移动块固定在水平移动组件上,通过水平移动组件上的伺服电机可带动丝杆旋转,旋转的丝杆可通过移动块带动定位板水平移动,便于调节工件的水平位置,本实用新型效率高、稳定性高、可水平调节和可拆卸清洗。
附图说明
15.图1为本实用新型的结构示意图;
16.图2为本实用新型图1中第一夹紧机构的结构示意图;
17.图3为本实用新型图1中定位板的安装示意图;
18.图4为本实用新型图3中a处结构放大图。
19.附图标记:
20.1、定位板;2、第一固定弧板;3、第一夹紧机构;31、固定座;32、螺纹旋孔;33、t型螺杆;34、移动弧板;35、第一轴承;36、限位管;37、限位杆;4、第二夹紧机构;5、第二固定弧板;6、水平移动组件;61、壳体;62、丝杆;63、第二轴承;64、伺服电机;65、垫片;66、通孔;7、移动块;8、螺栓;9、螺母;10、第一安装孔;11、第二安装孔。
具体实施方式
21.为使本实用新型的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本实用新型进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本实用新型的概念。
22.请参阅图1、3和4,本实用新型为一种激光焊接工件用定位机构,包括定位板1,定位板1的前端从左到右依次固定有第一固定弧板2、第一夹紧机构3、第二夹紧机构4和第二固定弧板5,通过第一固定弧板2和第一夹紧机构3可定位夹紧工件,通过第二夹紧机构4和第二固定弧板5也可夹紧工件,且定位板1的后端固定有移动块7,移动块7上固定有螺栓8,且螺栓8从前到后穿过定位板1上开设的第一安装孔10和移动块7上开设的第二安装孔11后与螺母9固定连接,通过螺栓8和螺母9可连接定位板1和移动块7,便于拆卸清洗,移动块7固定在水平移动组件6上。
23.其中如图1和2所示,第一夹紧机构3和第二夹紧机构4都包括固定座31、t型螺杆33和移动弧板34,移动弧板34上固定有第一轴承35,且移动弧板34通过第一轴承35与t型螺杆33转动连接,通过第一轴承35使得t型螺杆33可在移动弧板34上旋转,便于t型螺杆33推动移动弧板34,固定座31上开设有螺纹旋孔32,且固定座31通过螺纹旋孔32与t型螺杆33转动
连接,通过螺纹旋孔32使得t型螺杆33可在固定座31上旋转,便于t型螺杆33推动移动弧板34,固定座31固定在定位板1上,固定座31上对称位置固定有限位管36,且限位管36与移动弧板34上固定的限位杆37套接连接,通过限位管36和限位杆37的配合可限制移动弧板34移动的位置,防止移动弧板34偏离位置。
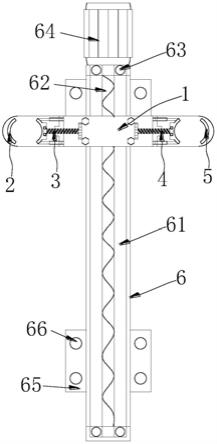
24.其中如图1和3所示,水平移动组件6包括壳体61,壳体61的内壁固定有第二轴承63,且壳体61通过第二轴承63与丝杆62转动连接,通过第二轴承63便于丝杆62在壳体61上旋转,丝杆62与移动块7螺纹连接,丝杆62旋转可推动移动块7水平移动,且丝杆62与壳体61上端固定的伺服电机64的输出端固定连接,伺服电机64的型号为ihss57
‑
36
‑
20,伺服电机64可带动丝杆62旋转,壳体61的左右端对称位置设置有垫片65,且垫片65上对称位置开设有通孔66。
25.工作原理:接入电源,先将工件放置在第一固定弧板2和第一夹紧机构3的中间,并将工件的左端与第一固定弧板2的右端抵接,然后旋转第一夹紧机构3上的t型螺杆33,使得t型螺杆33带动移动弧板34向工件靠近,直到移动弧板34与工件的右端抵接为止,移动过程中限位杆37会在限位管36内滑动,同理,可将工件通过第二夹紧机构4和第二固定弧板5夹紧固定即可,调节水平位置时,先通过外部控制终端控制水平移动组件6上的伺服电机64运转,伺服电机64运转会带动丝杆62旋转,丝杆62旋转会通过移动块7带动定位板1和工件移动,移动到合适的位置即可,清洗时,先使用扳手固定螺母9,然后向下旋转螺母9完全脱离螺栓8为止,即可分离移动块7和定位板1,最后单独清洗定位板1。
26.应当理解的是,本实用新型的上述具体实施方式仅仅用于示例性说明或解释本实用新型的原理,而不构成对本实用新型的限制。因此,在不偏离本实用新型的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。此外,本实用新型所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1