一种并行传送机构的制作方法
[0001]
本实用新型涉及电子行业传送领域,特别是涉及一种并行传送机构。
背景技术:
[0002]
电子类行业中,零配件多以轻、小以及塑料制品为主,如电脑配件、打印机配件、自动提款机配件,在组装设备中,往往使用人力完成上下料、物料周转、人工组装,自动化程度较低,生产效率低,装配效果差。
技术实现要素:
[0003]
本实用新型为了解决现有电子类行业零配件输送、装配自动化程度较低的技术问题,提供一种自动化程度高的并行传送机构。
[0004]
本实用新型提供一种并行传送机构,其设有立柱,立柱下端装设有第一直线导轨,立柱上设有滚珠丝杠,滚珠丝杠与第一伺服电机连接,立柱上还设有摆杆电机,摆杆电机上连接设有曲柄摇杆,曲柄摇杆另一端还连接设有机械本体,机械本体与第一直线导轨滑动连接,曲柄摇杆转动平面与第一直线导轨垂直,机械本体下端装设有装夹机构。
[0005]
优选地,立柱还设有第二直线导轨和第三直线导轨,第二直线导轨和第三直线导轨构成平面与第一直线导轨方向垂直,第二直线导轨和第三直线导轨分别与机械本体滑动连接。
[0006]
优选地,摆杆电机为伺服电机。
[0007]
优选地,摆杆电机为步进电机。
[0008]
优选地,装夹机构为气爪。
[0009]
优选地,装夹机构为吸盘。
[0010]
本实用新型有益效果:
[0011]
本实用新型将直线滑块机构和曲柄摆杆机构进行组合,配合气爪或者吸盘可完成多种物料的夹取,将大大缩减类似设备装配过程中物料传送时间,能快速相应,并按要求完成组装,传动效率高,装配质量好。采用三个直线滑块和一个曲柄摆杆机构,可对需要传送的零配件进行三维位置传动。在x轴方向的行程为300mm,并且在可在任意位置停下工作,位置精度为0.01mm,重复定位精度不大于0.005mm;y轴方向的行程为800mm,可在任意停下工作,位置精度为0.01mm,重复定位精度不大于0.005mm;z轴方向的行程为100mm,位置精度为0.01mm,可在任意停下工作,复定位精度不大于0.005mm。
附图说明
[0012]
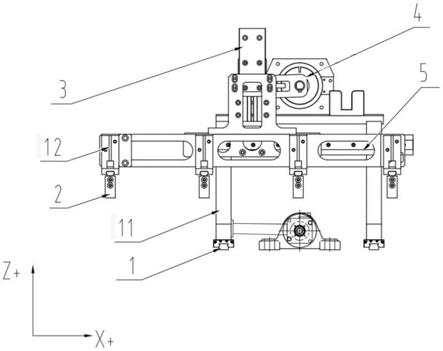
图1是本实用新型第一位置主视图;
[0013]
图2是本实用新型第一位置俯视图;
[0014]
图3是本实用新型第二位置主视图;
[0015]
图4是本实用新型第二位置俯视图。
[0016]
附图符号说明:
[0017]
1.第一直线导轨;2.气爪;3.第二直线导轨;4.曲柄摇杆;5.第三直线导轨;6.第一伺服电机;7.联轴器;8.带座轴承;9.滚珠丝杠;10.摆杆电机;11.立柱;12.机械本体。
具体实施方式
[0018]
下面结合附图和实施例对可本实用新型做进一步说明,以使本实用新型所属技术领域的技术人员能够容易实施本实用新型。
[0019]
实施例1:如图1-2所示,是本实施例第一位置主视图及俯视图,如图3-4所示,是本实施例另一位置时主视图及俯视图,其根据右手笛卡尔坐标系建立坐标系,本实施例设有立柱11,立柱11下端装设有第一直线导轨1,第一直线导轨1沿y轴方向铺设,立柱11装设有滚珠丝杠9,滚珠丝杠9通过联轴器7与第一伺服电机6连接,滚珠丝杠9固定在带座轴承8上,滚珠丝杠9旋转驱动立柱11整体在第一直线导轨1上沿y轴方向运动,结构具有传动效率高,定位精度高、重复定位误差小的优点。立柱11上设有摆杆电机10、第二直线导轨3和第三直线导轨5,摆杆电机10上连接设有曲柄摇杆4,曲柄摇杆4与机械本体12连接,机械本体12同时还与第二直线导轨3和第三直线导轨5滑动连接,第二直线导轨3沿z轴方向铺设,第三直线导轨5沿x轴方向铺设,摆杆电机10驱动曲柄摇杆4摆动,使机械本体12沿第二直线导轨3和第三直线导轨5在z轴和x轴方向移动。机械本体12下端可以根据需要装设不同数量的气爪2,或者装设多组吸盘对零配件进行夹取。摆杆电机10根据需要可以采取伺服电机或者步进电机。
[0020]
本实用新型工作状态描述:气爪2或吸盘在起始位置完成对零配件的夹取,第一伺服电机6驱动滚珠丝杠9旋转,使立柱11整体在第一直线导轨1上沿着y轴负方向运动,同时摆杆电机10带动曲柄摇杆4摆动,气爪2或吸盘在第二直线导轨3上沿z轴正方向运动,同时气爪2或吸盘在第三直线导轨5上沿x轴正方向运动,直至完成所需的动作。
[0021]
x轴与z轴方向的运动通过摆杆电机10带动曲柄摇杆4摆动实现,y轴方向通过单独的第一伺服电机6实现,控制精度高,传递位置准确,将大大缩减类似设备装配过程中物料传送时间,能快速相应,并按要求完成组装,传动效率高,装配质量好。在x轴方向的行程为300mm,并且在可在任意位置停下工作,位置精度为0.01mm,重复定位精度不大于0.005mm;y轴方向的行程为800mm,可在任意停下工作,位置精度为0.01mm,重复定位精度不大于0.005mm;z轴方向的行程为100mm,位置精度为0.01mm,可在任意停下工作,复定位精度不大于0.005mm。
[0022]
以上所述仅对本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡是在本实用新型的权利要求限定范围内,所做的任何修改、等同替换、改进等,均应在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1