机器人焊接设备的制作方法
1.本实用新型涉及一种工业上焊接用的机器人,具体涉及一种机器人焊接设备。
背景技术:
2.机器人焊接设备主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。
3.现有机器人的活动端部会设置有供焊枪安装的安装座,该安装座连接在一控制轴上,该控制轴由一伺服电机传动连接,在实际焊接操作过程中,虽然安装座的位置由程序中控制,但是安装座上焊枪的输出点与被焊接的金属件存在一定的间隔或位置误差,导致焊接效果不理想,使得操作员需要修改程序中的参数,同时还需多次试焊,极大影响工作效率。
技术实现要素:
4.为解决上述问题,本实用新型的目的在于提供一种焊枪位置可旋动微调的机器人焊接设备,从而以高效的方式解决焊接输出点的位置偏差。
5.为实现上述目的,本实用新型提供了如下技术方案:一种机器人焊接设备,包括旋动座、铰接臂、活动座以及旋转臂,旋转臂可转动安装在活动座上,所述铰接臂一端与所述旋动座的活动端铰接,其另一端与所述活动座铰接,所述活动座上配置有旋转电机,该旋转电机的输出端与所述旋转臂连接,所述的旋转臂端部设有限位槽,在所述限位槽内设有控制轴,该控制轴与一伺服电机传动连接,所述的控制轴上套接有焊枪安装座,所述的焊枪安装座和所述的控制轴之间设有位置调节机构,所述位置调节机构包括设置在所述焊枪安装座上的两个螺纹孔,该两个螺纹孔呈对称设置在所述控制轴上偏离其中心轴的一侧,在两所述螺纹孔内分别配置调节螺丝,在所述控制轴上设有与所述螺纹孔相对应且呈“l”形的抵接槽,两所述调节螺丝分别螺接在所述螺纹孔内,其端部抵接在所述抵接槽的底面上。
6.所述抵接槽上设有弧形凹坑,所述调节螺丝端部抵接在该弧形凹坑上。
7.所述调节螺丝的端部呈圆锥形,该圆锥形的尖部设置呈与所述弧形凹坑相匹配的圆弧形。
8.两所述螺纹孔的端口设置在所述焊枪安装座的上下端面上。
9.本实用新型的这种结构,通过位置调节机构可使焊枪安装座和控制轴的位置可相对旋动调节,使得焊枪的输出点的初始状态可作直接调整,使得在实际焊接作用中,如果焊接效果不理想,普通工人也可直接调节操作,从而以高效地解决焊接输出点的位置偏差,提高工作效率。
10.下面结合附图和具体实施方式对本实用新型作进一步描述。
附图说明
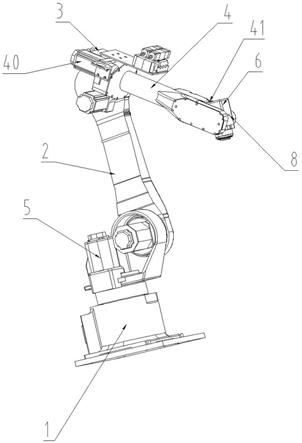
11.图1为本实用新型具体实施方式的立体图;
12.图2为焊枪安装座和控制轴的配合结构图;
13.图3为图2中a的放大图。
具体实施方式
14.下面通过实施例对本实用新型进行具体的描述。
15.如图1—图3所示,本实施例公开了一种机器人焊接设备,包括旋动座1、铰接臂2、活动座3以及旋转臂4,当然还有控制柜(图中未示出),旋转臂4可转动安装在活动座3上,活动座3上配置与控制柜连接的旋转伺服电机40供旋转臂4旋转,铰接臂2一端与旋动座1的活动端铰接,旋动座1上配置有旋转电机5,该旋转电机5与控制柜连接,旋转电机5的输出轴与铰接臂2一端传动连接,铰接臂2的另一端与活动座3铰接,铰接臂2的两个铰接端部均配置有控制伺服电机,控制伺服电机与控制柜连接,两控制伺服电机可实现控制铰接臂2的活动,活动座3上配置有旋转电机5,该旋转电机5的输出端与旋转臂4连接,旋转电机5也与控制柜连接,旋转臂4端部设有限位槽41,在限位槽41内设有控制轴7,该控制轴7与一伺服电机传动连接,该伺服电机也与控制柜连接,控制轴7上套接有焊枪安装座6,焊枪安装座6上配置有焊枪,焊枪安装座6和控制轴7之间设有位置调节机构8,位置调节机构8包括设置在焊枪安装座6上的两个螺纹孔81,该两个螺纹孔81呈对称设置在控制轴7上偏离其中心轴的一侧,在两螺纹孔81内分别配置调节螺丝82,在控制轴7外壁上设有与螺纹孔81相对应且呈“l”形的抵接槽83,两调节螺丝82分别螺接在螺纹孔81内,其端部抵接在抵接槽83的底面上,操作时,将一侧的调节螺丝82松开,另一侧的调节螺丝82旋进一定距离,驱使焊枪安装座6和控制轴7发生角度位移,从而完成角度的调节,随后松开的调节螺丝82旋紧,使得控制轴7和焊枪安装座6之间的位置固定。
16.抵接槽83上设有弧形凹坑831,调节螺丝82端部抵接在该弧形凹坑831上。通过这样的结构可调节螺丝82的端部限制在弧形凹坑831内运动,提高调节的可靠性。
17.调节螺丝82的端部呈圆锥形,该圆锥形的尖部设置呈与弧形凹坑831相匹配的圆弧形821。通过这样的结构可使调节螺丝82和弧形凹坑831之间的接触更加平顺,可提高调节的稳定性。
18.两螺纹孔81的端口设置在焊枪安装座6的上下端面上。这样的设置可使螺丝刀更加方便的调节,提高操作的方便性。
19.采用上述技术方案,通过位置调节机构8可使焊枪安装座6和控制轴7的位置可相对旋动调节,使得焊枪的输出点的初始状态可作直接调整,使得在实际焊接作用中,如果焊接效果不理想,普通工人也可直接调节操作,从而以高效地解决焊接输出点的位置偏差,提高工作效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1