一种点焊机的制作方法
1.本申请涉及焊接设备的技术领域,尤其是涉及一种点焊机。
背景技术:
2.目前点焊机是采用双面双点过流焊接的原理,工作时两个电极加压工件使两层金属在两电极的压力下形成一定的接触电阻,而焊接电流从一电极经另一电极时在两接触电阻点形成瞬间的热熔接,且焊接电流瞬间从一电极沿两工件流至此电极形成回路,不伤及被焊接件。
3.公告号为cn206795020u的中国实用新型专利中公开了一种点焊机,包括机身、位于机身上的上电极组件和下电极组件,所述机身上安装有输送工件的传送机构,所述传送机构包括传送架和转动连接在传送架上的传送辊,所述传送辊位于上电极组件和下电极组件之间,所述传送辊间通过皮带传动,所述传送架上安装有用于驱动所述传送辊的驱动电机。上述装置在对工件进行电焊工作时,启动驱动电机,驱动电机驱动传送辊发生转动,传送辊进一步带动工件运输至上电极组件和下电极组件之间,然后上电极组件和下电极组件与工件抵接并进行点焊工作。
4.针对上述中的相关技术,发明人认为存在有如下缺陷:上述装置在对工件进行电焊工作时,工件通过传送辊运输至上电极组件和下电极组件之间使得工件抵接支撑座,然后保护罩和下板体依次抵接工件,但是上述过程仅仅起到对工件的初步限位的功能,并不能起到对工件较好的固定作用,因此在进行点焊的过程中,工件可能由于外力等因素发生位置的偏移,进而影响点焊工作的精度。
技术实现要素:
5.为了改善点焊过程中对工件的固定效果不好进而影响点焊工作的精度的问题,本申请提供一种点焊机。
6.本申请提供的一种点焊机采用如下的技术方案:
7.一种点焊机,包括机架,所述机架上安装有传送架,所述传送架上转动连接有多个传送辊,所述机架上安装有上电极和下电极,所述上电极和所述下电极分别位于所述传送架的两侧,所述传送架上安装有夹持装置,所述夹持装置包括两安装台和两抵紧块,两所述安装台分别安装在所述传送架上,各所述抵紧块均分别滑移连接在两所述安装台上,两所述安装台间安装有驱动组件,所述驱动组件用于驱动两所述抵紧块相互靠近或远离。
8.通过采用上述技术方案,当需要对工件进行点焊工作时,传送辊带动工件运输至上电极和下电极之间,然后启动驱动组件,驱动组件驱动两抵紧块相互靠近,两抵紧块进一步对工件进行夹持工作,然后上电极和下电极进一步对工件进行点焊工作,进一步减小外力等因素对工件位置的影响,进一步提高工件点焊工作的质量。
9.优选的,所述驱动组件包括转动轴、第一齿轮、第二齿轮和伺服电机,所述机架底端安装有c形块,所述c形块的两端分别与两所述安装台连接,所述c形块内开设有安装腔,
所述伺服电机固定连接在所述c形块一侧,所述转动轴沿所述机架宽度方向转动连接在所述c形块上,且所述转动轴与所述伺服电机输出轴连接,所述第一齿轮和所述第二齿轮均固定连接在所述转动轴伸入所述安装腔内的外周壁上,所述第一齿轮、所述第二齿轮上设置有传动组件,所述传动组件用于带动所述抵紧块发生位移。
10.通过采用上述技术方案,当需要对工件进行夹持工作时,启动伺服电机,伺服电机的输出轴带动转动轴发生转动,转动轴进一步带动第一齿轮和第二齿轮发生转动,第一齿轮和第二齿轮通过传动组件进一步推动两抵紧块相互靠近,两抵紧块进一步将工件夹紧固定,实现对工件的夹持工作。
11.优选的,所述传动组件包括第一螺纹杆、第二螺纹杆、第三齿轮、第四齿轮、第三螺纹杆和第四螺纹杆,所述第一螺纹杆和所述第二螺纹杆均沿竖直方向转动连接在所述安装腔内,所述第一螺纹杆和所述第二螺纹杆的螺纹方向相反,所述第一齿轮与所述第一螺纹杆相啮合,所述第二齿轮与所述第二螺纹杆相啮合,所述第三螺纹杆和所述第四螺纹杆均分别沿所述机架宽度方向螺纹连接在所述c形块上,所述第三螺纹杆的一端伸入所述安装腔内并与所述第三齿轮固定连接,所述第三螺纹杆的另一端与所述抵紧块螺纹连接,所述第四螺纹杆的一端伸入所述安装腔内并与所述第四齿轮固定连接,所述第四螺纹杆的另一端与所述抵紧块螺纹连接,所述第三齿轮与所述第一螺纹杆相啮合,所述第四齿轮与所述第二螺纹杆相啮合。
12.通过采用上述技术方案,当需要对工件进行夹持工作时,启动伺服电机,伺服电机的输出轴带动转动轴发生转动,转动轴进一步带动第一齿轮和第二齿轮发生同向转动,第一齿轮带动第一螺纹杆发生转动,第一螺纹杆带动第三齿轮发生转动,第三齿轮带动第三螺纹杆发生转动;同时第二齿轮带动第二螺纹杆发生转动,第二螺纹杆带动第四齿轮发生转动,第四齿轮带动第四螺纹杆发生转动,由于第一螺纹杆和第二螺纹杆的螺纹方向相反,因此第三螺纹杆和第四螺纹杆的转动方向相反,第三螺纹杆和第四螺纹杆进一步驱动两抵紧块相互靠近,进而实现对工件的夹持工作。
13.优选的,所述抵紧块包括矩形块和抵紧部,两所述矩形块分别与所述第三螺纹杆、所述第四螺纹杆螺纹连接,所述矩形块的底面与所述安装台顶面抵紧,所述抵紧部可拆卸连接在所述矩形块上,所述抵紧部上设置有安装件。
14.通过采用上述技术方案,矩形块底面与安装台顶面抵紧的设置,使得第三螺纹杆和第四螺纹杆发生转动后,两矩形块即可改变在第三螺纹杆和第四螺纹杆上的位置,进而使得两矩形块上的抵紧部相互靠近,实现对工件的夹持工作。
15.优选的,所述安装件包括安装块和锁紧螺栓,所述矩形块上开设有燕尾槽,所述安装块固定连接在所述抵紧部上,所述安装块滑移连接在所述燕尾槽内,所述锁紧螺栓穿过所述安装块并螺纹连接到所述燕尾槽内。
16.通过采用上述技术方案,安装块和锁紧螺栓的设置,使得工作人员可根据进行点焊的工件来选择合适的抵紧块,进而使得在对不同工件进行点焊工作时,抵紧块始终对工件处于较佳的抵紧状态,减小外力等因素对工件位置产生的影响,提高工件点焊工作的质量。
17.优选的,所述传送架沿长度方向开设有滑移槽,所述安装台底部固定连接有滑块,所述滑移槽内转动连接有丝杠,所述滑块上开设有与所述丝杠配合的丝杠螺纹孔,所述丝
杠的一端伸出所述机架并固定连接有手柄。
18.通过采用上述技术方案,由于传送辊在运输工件时工件具有一定的惯性,因此可能工件无法精准得停留在上电极和下电极之间,此时需要工作人员手动调整工件的位置。转动手柄,手柄进一步带动丝杠发生转动,丝杠与滑块上丝杠螺纹孔的配合、以及滑块与滑移槽的配合,使得滑块改变在丝杠上的位置,进而实现对工件位置的调整。
19.优选的,所述丝杠伸出所述机架的一端固定连接有限位齿轮,所述机架端部固定连接有固定座,所述固定座上滑移连接有滑移杆,所述滑移杆靠近所述限位齿轮的一端固定连接有限位齿块,所述限位齿块与所述限位齿轮相啮合。
20.通过采用上述技术方案,限位齿轮和限位齿块的配合,实现了对丝杠周向转动的限制,进而实现了滑块在丝杠上位置的锁定,进而减小外力等因素对工件在机架上位置的影响,进一步提高工件的点焊工作的质量。
21.优选的,所述机架一侧固定连接有安装柱,所述安装柱沿竖直方向固定连接有第一安装座和第二安装座,所述第一安装座上固定连接有第一气缸,所述第一气缸的活塞杆与所述上电极连接,所述第二安装座上固定连接有第二气缸,所述第二气缸的活塞杆与所述下电极连接。
22.通过采用上述技术方案,当需要对工件进行点焊工作时,第一气缸的活塞杆推动上电极发生位移,第二气缸的活塞杆推动下电极发生位移,上电极和下电极进一步与工件接触,实现对工件的点焊工作。
23.综上所述,本申请包括以下至少一种有益技术效果:
24.1.通过夹持装置、驱动组件和传动组件的设置,使得工作人员可对工件进行固定夹持工作,进一步加强工件在进行点焊工作时的稳定性,减小外力等因素对工件位置产生的影响,进而提高工件点焊工作的质量;
25.2.通过安装件的设置,使得工作人员可根据待加工工件的形状来选择合适的抵紧块,使得对不同加工工件进行夹持工作时,抵紧块与工件间均处于较佳的抵紧状态。
附图说明
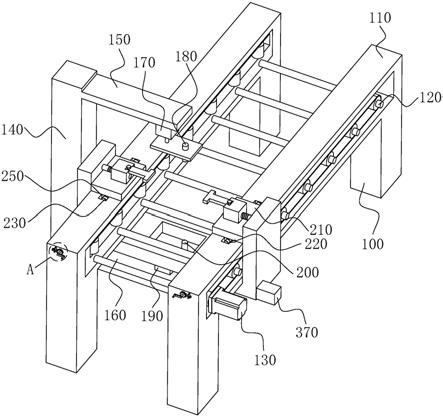
26.图1是本申请实施例的点焊机的立体结构示意图;
27.图2是图1所示的a部分的局部放大结构示意图,示出了丝杠处的具体结构;
28.图3是图1所示安装台处的爆炸结构示意图,示出了抵紧块处的具体结构;
29.图4是图1所示机架沿竖直方向的剖视结构示意图,示出了驱动组件和传动组件处的具体结构。
30.附图标记说明:100、机架;110、传送架;120、传送辊;130、驱动电机;140、安装柱;150、第一安装座;160、第二安装座;170、第一气缸;180、上电极;190、第二气缸;200、下电极;210、安装台;220、滑移槽;230、丝杠;240、手柄;250、滑块;260、限位齿轮;270、固定座;280、滑移杆;290、限位齿块;300、矩形块;310、抵紧部;320、燕尾槽;330、安装块;340、锁紧螺栓;350、c形块;360、安装腔;370、伺服电机;380、转动轴;390、第一齿轮;400、第二齿轮;410、第一螺纹杆;420、第二螺纹杆;430、第三螺纹杆;440、第四螺纹杆;450、第三齿轮;460、第四齿轮。
具体实施方式
31.以下结合附图1
‑
4对本申请作进一步详细说明。
32.本申请实施例公开一种点焊机。参照图1,点焊机包括机架100,机架100沿长度方向固定连接有传送架110,传送架110沿机架100长度方向间隔转动连接有多根传送辊120,传送架110的一端端部固定连接有驱动电机130,驱动电机130的输出轴与位于传送架110端部的传送辊120固定连接。
33.参照图1,机架100靠近驱动电机130的一端侧壁处固定连接有安装柱140,安装柱140沿竖直方向固定连接有第一安装座150和第二安装座160,第一安装座150和第二安装座160分别位于传送架110的上方和下方。第一安装座150上固定连接有第一气缸170,第一气缸170的活塞杆处固定连接有上电极180,第二安装座160上固定连接有第二气缸190,第二气缸190的活塞杆处固定连接有下电极200。
34.参照图1和图2,传送架110上安装有用于夹紧工件的夹持装置,夹持装置包括安装台210,传送架110沿长度方向开设有滑移槽220,滑移槽220内转动连接有丝杠230,丝杠230的一端伸出机架100靠近驱动电机130的一端并固定连接有手柄240。安装台210的底面固定连接有滑块250,滑块250滑移连接在滑移槽220内,滑块250上开设有与丝杠230配合的丝杠螺纹孔。丝杠230伸出机架100的一端固定连接有限位齿轮260,机架100靠近限位齿轮260的一端端面固定连接有固定座270,固定座270上沿水平方向滑移连接有滑移杆280,滑移杆280靠近限位齿轮260的一端固定连接有限位齿块290,限位齿块290与限位齿轮260相啮合。
35.参照图3,各安装台210的顶面均滑移连接有抵紧块,各抵紧块均包括矩形块300和抵紧部310,矩形块300滑移连接在安装台210上,且矩形块300的底面与安装台210的顶面抵紧,两矩形块300相互靠近的一侧侧壁沿竖直方向开设有燕尾槽320,抵紧部310与矩形块300间设置有安装件。安装件包括安装块330,安装块330固定连接在抵紧部310靠近矩形块300的一端,安装块330滑移连接在燕尾槽320内,安装块330上螺纹连接有锁紧螺栓340,锁紧螺栓340的底端与燕尾槽320槽底螺纹连接。
36.参照图4,机架100的底端固定连接有c形块350,c形块350的开口朝向上电极180(参照图1)设置,且c形块350的底面开设有供下电极200(参照图1)穿过的通孔,c形块350的两端分别与两安装台210的侧壁固定连接,且c形块350的两端端面高于两安装台210顶面,c形块350内开设有安装腔360,安装腔360内安装有用于驱动两抵紧块相互靠近或远离的驱动组件。
37.参照图4,驱动组件包括伺服电机370,伺服电机370固定连接在c形块350的一侧侧壁,安装腔360内沿机架100宽度方向转动连接有转动轴380,转动轴380与伺服电机370的输出轴固定连接。位于安装腔360内的转动轴380沿轴向固定连接有第一齿轮390和第二齿轮400,第一齿轮390和第二齿轮400上均设置有用于带动抵紧块发生位移的传动组件。
38.参照图4,传动组件包括第一螺纹杆410和第二螺纹杆420,第一螺纹杆410和第二螺纹杆420均沿竖直方向转动连接在安装腔360内,且第一螺纹杆410和第二螺纹杆420的螺纹方向相反,第一齿轮390与第一螺纹杆410相啮合,第二齿轮400与第二螺纹杆420相啮合。c形块350的顶端沿机架100宽度方向转动连接有第三螺纹杆430和第四螺纹杆440,第三螺纹杆430的一端伸入安装腔360内并固定连接有第三齿轮450,第三齿轮450与第一螺纹杆410相啮合,第三螺纹杆430远离第三齿轮450的一端与一矩形块300螺纹连接。第四螺纹杆
440的一端伸入安装腔360内并固定连接有第四齿轮460,第四齿轮460与第二螺纹杆420相啮合,第四螺纹杆440远离第四齿轮460的一端与另一矩形块300螺纹连接。
39.本申请实施例一种点焊机的实施原理为:
40.当需要对工件进行点焊工作时,启动驱动电机130,驱动电机130带动传送辊120发生转动,传送辊120进一步将工件运输至上电极180和下电极200之间,关闭驱动电机130。启动伺服电机370,伺服电机370的输出轴带动转动轴380发生转动,转动轴380进一步带动第一齿轮390和第二齿轮400发生同向转动,第一齿轮390带动第一螺纹杆410发生转动,第一螺纹杆410带动第三齿轮450发生转动,第三齿轮450带动第三螺纹杆430发生转动;同时第二齿轮400带动第二螺纹杆420发生转动,第二螺纹杆420带动第四齿轮460发生转动,第四齿轮460带动第四螺纹杆440发生转动,由于第一螺纹杆410和第二螺纹杆420的螺纹方向相反,因此第三螺纹杆430和第四螺纹杆440的转动方向相反,第三螺纹杆430和第四螺纹杆440进一步驱动两抵紧块相互靠近,进而实现对工件的夹持工作。
41.然后第一气缸170的活塞杆推动上电极180发生位移,第二气缸190的活塞杆推动下电极200发生位移,上电极180和下电极200进一步与工件接触,实现对工件的点焊工作。
42.以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1