一种用于煤矿液压支架结构件自动弧焊七轴焊接机器人的制作方法
1.本实用新型属于自动化焊接设备技术领域,具体涉及一种用于煤矿液压支架结构件自动弧焊七轴焊接机器人。
背景技术:
2.目前煤矿液压支架结构件的自动化焊接主要采用六轴和七轴关节机器人,从事自动化六关节焊接机器人的国外厂家主要有:川崎、发那科、安川、abb、库卡、现代等,国产厂家主要有:卡诺普、新时达等,焊接臂展最大在2m以内,负载在20公斤以下。
3.七轴关节机器人主要使用德国cools品牌,因煤矿液压支架结构件体积较大、重量大,焊接范围要求较广,比较成功的应用关节机器人的依然只有德国cools七轴机器人,其2600mm臂展在行业内独树一帜,占据着液压支架重型结构件的中高端市场,只有大型企业才能支付起高昂的设备购置费和售后维护费用。
4.随着人工成本的增加,中小企业对重型结构件的焊接市场,即长臂展、大范围的焊接机器人有着极强的市场需求。但德国cools等高端进口品牌的高昂价格和维护费用迫使中小企业采用轨道式和翻转式两种形式来扩展六轴关节机器人的焊接范围。
5.轨道式将六轴关节机器人放置在平行工件的轨道上,在轨道上平行移动机器人从而实现焊接范围的扩大,其优点是关节机器人跟随轨道位移使焊接范围扩大,缺点是长时间使用后轨道磨损精度降低;轨道表面维护困难;拖链电缆遇到焊弧渣不安全;使用空间大;设备造价较高。
6.翻转平台式把结构件固定在翻转平台上,将翻转平台作为整个弧焊工作站的第七轴,对工件进行实无协调旋转,使六轴关节机器人接近焊接点,从而完成焊接任务。但这种方法对翻转平台的精度、负重、协调等方面有着极高的要求,而煤矿液压支架结构件轻则数百公斤,重则十几吨无法实现放置在翻转台上,即使几百公斤的工件放在翻转平台上夹紧、翻转等动作实现都存在很多问题。
7.鉴于普通六轴关节机器人、轨道式七轴机器人和翻转台配合的六轴关节机器人及昂贵造价的德国cools七轴机器人都不能完全满足中小型企业对煤矿液压支架自动化技术的需求,因此,提供一款加装七轴关节式焊接机器人设备是存在一定必要性的。
技术实现要素:
8.本实用新型的目的在于提供一种用于煤矿液压支架结构件自动弧焊七轴焊接机器人,旨在解决现有的普通六轴关节机器人、轨道式七轴机器人和翻转台配合的六轴关节机器人及昂贵造价的德国cools七轴机器人都不能完全满足中小型企业对煤矿液压支架自动化技术的需求的问题。
9.为实现上述目的,本实用新型提供如下技术方案:一种用于煤矿液压支架结构件自动弧焊七轴焊接机器人,包括底座,所述底座由立柱和底板组成,所述立柱的底部与底板的顶部固定连接,所述立柱的顶部固定安装有rv变速箱,所述rv变速箱的顶部设有连接板,
所述连接板的底端与rv变速箱的旋转输出端转动连接,所述rv变速箱的输入端与伺服电机的输出轴转动连接,所述伺服电机置于连接板顶部的一端,且伺服电机的壳体底部与连接板固定连接,所述连接板的另一端通过滑动机构安装有六轴关节机器人。
10.为了使得六轴关节机器人在连接板上安装时进行微调,作为本实用新型一种优选的,所述滑动机构包括固定安装于连接板表面的两根滑轨,两根所述滑轨平行设置,且两根滑轨的滑动端安装有安装板,所述安装板通过螺钉与六轴关节机器人的安装座固定连接。
11.为了使得底座具有较高的结构强度,作为本实用新型一种优选的,所述底板的顶部固定设有多个加强板,所述加强板的一侧与立柱的外侧固定连接。
12.为了使得伺服电机可以更为高效的驱动rv变速箱,作为本实用新型一种优选的,所述伺服电机的输出轴与连接板的穿插连接处套设有轴承,所述轴承与嵌设于连接板内部的轴承座固定连接。
13.为了使得机器人可以正常进行工作,作为本实用新型一种优选的,所述伺服电机和六轴关节机器人均通过动力电缆线和通信线与工控机电柜连接。
14.与现有技术相比,本实用新型的有益效果是:
15.1)利用通过设有的底座、rv变速箱、连接板和伺服电机组成六轴关节机器人的第七轴,通过加装关节第七轴后,使得焊接机器人空间布局紧凑更加合理,并且大大的增加了机器人的焊接作业半径,提高了焊接机器人的适用性,并且该款焊接机器人较于市面上的七轴机器人造价更为低廉,可以更好的符合于中小型对煤矿液压支架自动化技术需求;
16.2)通过连接板顶部设置的安装板与滑轨配合,使得六轴关节机器人的拆装更为方便,并且使得六轴关节机器人在安装后可在连接板上进行微调。
附图说明
17.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
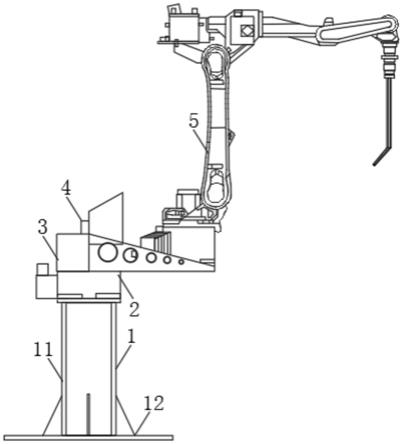
18.图1为本实用新型结构示意图;
19.图2为本实用新型的滑动机构结构示意图。
20.图中:1、底座;11、立柱;12、底板;2、rv变速箱;3、连接板;31、滑轨;32、安装板;4、伺服电机;5、六轴关节机器人。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1
‑
2,本实用新型提供以下技术方案:一种用于煤矿液压支架结构件自动弧焊七轴焊接机器人,包括底座1,底座1由立柱11和底板12组成,立柱11的底部与底板12的顶部固定连接,立柱11的顶部固定安装有rv变速箱2,rv变速箱2的顶部设有连接板3,连接板3的底端与rv变速箱2的旋转输出端转动连接,rv变速箱2的输入端与伺服电机4的输出轴转动连接,伺服电机4置于连接板3顶部的一端,且伺服电机4的壳体底部与连接板3固定连
接,连接板3的另一端通过滑动机构安装有六轴关节机器人5。
23.优选的,滑动机构包括固定安装于连接板3表面的两根滑轨31,两根滑轨31平行设置,且两根滑轨31的滑动端安装有安装板32,安装板32通过螺钉与六轴关节机器人5的安装座固定连接,使得六轴关节机器人5在连接板3上安装时可以进行微调。
24.优选的,底板12的顶部固定设有多个加强板,加强板的一侧与立柱11的外侧固定连接,通过设置的加强板可以进一步增加底座1的结构强度。
25.优选的,伺服电机4的输出轴与连接板3的穿插连接处套设有轴承,轴承与嵌设于连接板3内部的轴承座固定连接,防止伺服电机4的输出轴与连接板3的穿插连接处造成磨损。
26.优选的,伺服电机4和六轴关节机器人5均通过动力电缆线和通信线与工控机电性连接,利用动力电缆线对伺服电机4和六轴关节机器人5提供电力动能,通过通信线利用工控机对伺服电机4和六轴关节机器人5进行控制。
27.具体的,具体的,在对焊接机器人进行安装时,具体如下:首先将底座1的底板12与安装面进行水平固定,水平误差小于0.5mm,将rv变速箱2的底部固定端与底座1的立柱11相连,将连接板3的一端与rv变速箱2的旋转输出端连接固定,将型号为“ba006l”的川崎六轴关节机器人5的安装座固定在安装板32上,然后滑动安装板32,调节六轴关节机器人5在连接板3上的位置,位置调节完成后,将滑轨31的滑动端固定,最后连接动力电缆线和通信线,实现与电源和工控机的连接。
28.在实际使用过程中:六轴关节机器人5的臂展为2036mm、负载6kg、重量135kg,六轴关节机器人5和伺服电机4协同工作,由川崎机器人七轴协调软件进行控制,继而实现第七轴与六轴关节机器人5协同运行,臂展扩展到2636mm,实现直线、弧线等多轨迹功能和多重多道、特殊摆动等焊接工艺的实现,更好的满足了中小型对煤矿液压支架结构件自动化焊接技术需求。
29.本说明中未作详细描述的内容属于本领域专业技术人员公知的现有技术,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1