磁瓦自动组装设备的制作方法
1.本实用新型涉及了电机磁瓦组装技术领域,具体的是一种磁瓦自动组装设备。
背景技术:
2.目前,如图1所示的磁瓦的安装方式通常为:人员采用胶水并通过手工将四个磁瓦11拼接成圆柱形状,再将内壁涂有胶水的外壳12套装在围构成圆柱的四个磁瓦11外,最后,再将卡簧13压入四个磁瓦11所围构成的圆柱的内壁上以防止磁瓦11脱落。这种方法效率低下。
技术实现要素:
3.为了克服现有技术中的缺陷,本实用新型实施例提供了一种磁瓦自动组装设备,其可以简化磁瓦组装时各磁瓦之间的胶粘工序,提高生产效率。
4.本申请实施例公开了:一种磁瓦自动组装设备,其用于将多个磁瓦装入外壳内,所述外壳内的多个所述磁瓦围构成一圆柱,其包括:
5.磁棒;
6.套管,其套设在所述磁棒外;
7.多个盛具,多个所述盛具沿所述套管的周向均匀分布,任一所述盛具用于盛放多个磁瓦,所述盛具朝向所述套管的一端设有用于供所述磁瓦平移向所述套管的开口;
8.顶料气缸,其与所述套管连接,所述顶料气缸在多个所述磁瓦吸附在所述套管上以围构成圆柱后将所述套管顶出,以使得位于所述套管上的磁瓦沿轴线方向与位于所述盛具内的磁瓦错位;
9.外壳压装机构,其包括第一夹爪和第一气缸,所述第一夹爪用于夹持所述外壳,所述第一气缸用于驱动所述第一夹爪沿朝向所述套管的方向移动以使得所述外壳被压装在所述套管上的磁瓦外;
10.多个推料机构,一个所述推料机构用于将一个所述盛具内的磁瓦沿朝向所述套管的方向推动,任一所述推料机构包括推杆和用于驱动所述推杆移动的第二气缸。
11.具体的,所述磁瓦自动组装设备还包括第三气缸和与所述第三气缸连接的滑板,所述第一气缸固定在所述滑板上,所述第三气缸用于驱动所述第一气缸沿垂直于所述套管的轴线的方向移动。
12.具体的,所述磁瓦自动组装设备还包括固定在所述滑板上的第四气缸和连接在所述第四气缸上的磁吸模块,所述磁吸模块用于吸取卡簧,所述第四气缸能带动所述磁吸模块沿朝向所述套管的方向移动以将所述卡簧压入所述外壳中。
13.具体的,所述磁瓦自动组装设备还包括固定在所述滑板上的第五气缸和连接在所述第五气缸上的第二夹爪,所述第五气缸能驱动所述第二夹爪沿朝向所述套管的方向移动以夹取所述外壳。
14.具体的,所述第四气缸位于所述第一气缸和所述第五气缸之间,所述第一夹爪的
中心轴与所述磁吸模块的中心轴的距离等于所述第二夹爪的中心轴与所述磁吸模块的中心轴的距离。
15.具体的,所述磁瓦自动组装设备还包括外壳进料机构、卡簧供料机构和产品出料机构,所述卡簧供料机构位于所述套管的一侧,所述外壳进料机构位于所述卡簧供料机构远离所述套管的一侧,所述产品出料机构位于所述套管的另一侧。
16.具体的,所述磁瓦自动组装设备还包括位于所述外壳进料机构末端的点胶台、设置在所述外壳进料机构旁的第六气缸和连接在所述第六气缸上的第三夹爪,所述第六气缸能驱动所述第三夹爪夹取所述外壳进料机构上的外壳并搬运至所述点胶台上。
17.具体的,所述滑板至少具有第一停留位置、第二停留位置和第三停留位置;当所述滑板处于所述第一停留位置时,所述第一夹爪能位于所述点胶台的上方以夹取磁瓦,所述磁吸模块能位于所述卡簧供料机构的上方以吸取卡簧,所述第二夹爪能位于所述套管的上方以夹取产品;当所述滑板处于所述第二停留位置时,所述磁吸模块能位于所述套管的上方以将卡簧压入所述外壳中;当所述滑板处于所述第三停留位置时,所述第一夹爪能位于所述套管上方以将所述外壳压入所述套管上的多个磁瓦外,所述第二夹爪能位于所述产品出料机构上方以将产品放置在所述产品出料机构上。
18.具体的,所述外壳进料机构和/或所述产品出料机构为皮带传输机。
19.具体的,所述外壳进料机构上设有相对设置的第一导板和第二导板,所述第一导板和所述第二导板之间的距离沿进料方向减小。
20.本实用新型至少具有如下有益效果:
21.1.本实施例的磁瓦自动组装设备通过磁棒的磁力作用,将可以依次围构成圆柱体的多个磁瓦固定在套管上以预定位,再通过顶料气缸和外壳压装机构的共同作用,从而实现了磁瓦的自动定位和组装,省却了现有技术中的采用胶水将多个磁瓦粘住的工序,提高了组装效率。
22.2.本实施例能够实现取料和下料的同步化,进一步提高了生产效率。
23.为让本实用新型的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.图1是本实施例的磁瓦和卡簧组装在外壳中的结构示意图;
26.图2是本实用新型实施例中磁瓦自动组装设备的结构示意图;
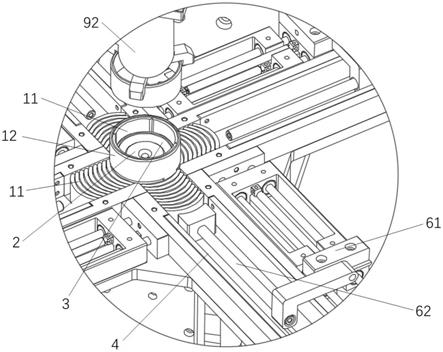
27.图3是图2中a处的局部放大图;
28.图4是图2中b处的局部放大图。
29.以上附图的附图标记:11、磁瓦;12、外壳;13、卡簧;2、磁棒;3、套管;4、盛具;51、第一气缸;52、第一夹爪;61、第二气缸;62、推杆;71、第三气缸;72、滑板;81、第四气缸;82、磁吸模块;91、第五气缸;92、第二夹爪;10、外壳进料机构;101、第一导板;102、第二导板;20、
卡簧供料机构;30、产品出料机构;40、点胶台;501、第六气缸;502、第三夹爪。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.本实施例的磁瓦自动组装设备,可用于将多个尚未经过胶粘的磁瓦11同时压装入外壳12内,以获得如图1所示的产品。采用本实施例的设备所组装的如图1所示的产品,其位于外壳12内以围构成圆柱体的多个磁瓦11之间不用采用胶粘的方式预先连接,各个磁瓦11只需与外壳12之间采用胶粘的方式连接。本设备可以极大地提高了生产效率。
32.结合图2和图3所示,本实施例的磁瓦自动组装设备可以包括,用于提供磁吸力的磁棒2、套设在磁棒2外的套管3、多个盛具4、顶料气缸(未图示)、外壳12压装机构和多个推料机构。其中,
33.多个盛具4沿套管3的周向均匀分布,例如,本实施例的产品中包括四个磁瓦11,因此,设备可以设置四个盛具4,四个盛具4沿套管3的周向均匀分布。任一盛具4用于盛放多个磁瓦11,且盛具4朝向套管3的一端设有用于供磁瓦11平移向套管3的开口,以使得磁瓦11能平移至被吸附在套管3上。具体来说,多个盛具4大体上处于同一水平位置上,以使得多个磁瓦11吸附在套管3上时能沿套管3的轴线方向上首位对齐,每个磁瓦11呈弧形状,具有相对的凹面和凸面,每个磁瓦11的凹面朝向套管3设置。
34.顶料气缸与套管3连接,其用于在当多个磁瓦11吸附在套管3上并围构成圆柱后将套管3顶出,以使得位于套管3上的多个磁瓦11沿轴线方向与位于盛具4内的磁瓦11产生错位。具体来说,多个盛具4可以水平设置,套管3的轴线与竖直方向平行,顶料气缸可以设置在套管3的下方,当多个磁瓦11吸附在套管3外(或者说抱住套管3的外壁)之后,顶料气缸可以将套管3向上顶起一个预设距离,以使得套管3上的磁瓦11能与尚留在盛具4内的磁瓦11分离,以便后工序中可以将外壳12压装在套管3上的磁瓦11外,从而实现了外壳12和磁瓦11的组装。
35.外壳12压装机构包括第一夹爪52和第一气缸51,其中,第一夹爪52用于夹持外壳12,第一气缸51用于驱动第一夹爪52沿朝向套管3的方向移动以使得第一夹爪52上的外壳12能被压装在套管3上的磁瓦11外。
36.多个推料机构与多个盛具4一一对应,一个推料机构用于将一个盛具4内的磁瓦11沿朝向套管3的方向推动,以使得位于盛具4内远离套管3一端的磁瓦11能逐渐靠近套管3,从而能被套管3吸附。任一推料机构包括推杆62和用于驱动推杆62移动的第二气缸61。
37.采用上述方案,本实施例的磁瓦自动组装设备通过磁棒2的磁力作用,将可以依次围构成圆柱体的多个磁瓦11固定在套管3上以预定位,再通过顶料气缸和外壳12压装机构的共同作用,从而实现了磁瓦11的自动定位和组装,省却了现有技术中的采用胶水将多个磁瓦11粘住的工序,提高了组装效率。
38.具体的,如图2所示,本实施例的磁瓦自动组装设备还可以包括第三气缸71和与第三气缸71连接的滑板72。第一气缸51固定在滑板72上,第三气缸71用于驱动第一气缸51沿
垂直于套管3的轴线的方向移动。也即是说,第一气缸51用于驱动第一夹爪52沿竖直方向上下移动,而第三气缸71用于驱动第一气缸51(也即第一夹爪52)沿水平方向移动,以使得第一夹爪52离开或位于套管3上方(或者说压装工位的上方)。较佳的,本实施例的磁瓦自动组装设备还可以包括固定在滑板72上的第四气缸81和连接在第四气缸81上的磁吸模块82。该磁吸模块82可以用于吸取卡簧13,第四气缸81能带动磁吸模块82沿朝向套管3的方向移动以将卡簧13压入外壳12中。如此,当外壳12压装在磁瓦11上之后,第四气缸81可以带动磁吸模块82将卡簧13压入磁瓦11所围构成的圆柱体的内壁上,实现卡簧13的自动组装。
39.进一步的,如图2所示,本实施例的磁瓦自动组装设备还可以包括固定在滑板72上的第五气缸91和连接在第五气缸91上的第二夹爪92,第五气缸91能驱动第二夹爪92沿朝向套管3的方向移动以夹取外壳12。如此,可以将组装完成的产品自组装工位上取下。
40.继续参照图2所示,沿水平方向上,第四气缸81可以位于第一气缸51和第五气缸91之间,第一夹爪52的中心轴与磁吸模块82的中心轴的距离等于第二夹爪92的中心轴与磁吸模块82的中心轴的距离。进一步的,本实施例的磁瓦自动组装设备还可以包括外壳进料机构10、卡簧供料机构20和产品出料机构30,卡簧供料机构20位于套管3的一侧,外壳进料机构10位于卡簧供料机构20远离套管3的一侧,而产品进料机构位于套管3的另一侧。较佳的,外壳进料机构10至套管3的中心轴的距离大体上与产品出料机构30至套管3的中心轴的距离相等。
41.本实施例的滑板72至少具有第一停留位置(如图2所示)、第二停留位置(未图示)和第三停留位置(未图示)。当滑板72处于第一停留位置时,第一夹爪52能位于外壳进料机构10的上方以夹取磁瓦11,此时,磁吸模块82能位于卡簧供料机构20上以吸取卡簧13,第二夹爪92能位于套管3的上方以夹取产品(当压装工位上有组装好的产品时夹取产品)或等待夹取产品(当压装工位上没有产品时等待)。当滑板72位于第二停留位置时,磁吸模块82能位于套管3的上方以将卡簧13压入外壳12中,此时,第一夹爪52并不位于外壳进料机构10上方,第二夹爪92也并不位于套管3的上方。当滑板72位于第三停留位置时,第一夹爪52能位于套管3上方以将外壳12压入套管3上的多个磁瓦11外,第二夹爪92能位于产品出料机构30上方以将产品放置在产品出料机构30上,此时,磁吸机构并不位于卡簧供料机构20或套管3的上方。
42.采用上述方案,本实施例的磁瓦自动组装设备在工作时,其初始状态下,滑板72可以处于第一停留位置以进行取料(取外壳12),接着,滑板72移动至第三停留位置,以对外壳12进行压装;接着,滑板72移动至第二停留位置,以实现卡簧13的压装;接着,滑板72再移动至第一停留位置,此时,第一夹爪52进行取料动作,而第二夹爪92进行出料动作(夹取压装工位上已经组装好的产品,待滑板72再移动至第三停留位置时,第二夹爪92可以将产品放在产品出料机构30上以实现出料)。如此,可以实现当第一夹爪52要压装外壳12时,第二夹爪92处于等待状态,当第一夹爪52要从外壳进料机构10上夹取外壳12时,第二夹爪92正好处于压装工位上以夹取组装完成的产品,当第一夹爪52带动下一个外壳12移动至压装工位上将要压装时,第二夹爪92可以将其上的产品放在产品出料机构30上,实现进料和出料的自动化和同步化,进一步提高了生产效率。
43.参照图2和图4所示,本实施例的磁瓦自动组装设备还可以包括位于外壳进料机构10末端的点胶台40、设置在外壳进料机构10旁的第六气缸501和连接在第六气缸501上的第
三夹爪502。当外壳12行至外壳进料机构10的预设位置时,第六气缸501可以驱动第三夹爪502夹取外壳12并将该外壳12搬运至点胶台40上,外壳12可以在点胶台40上完成其内圈的点胶作业,然后在被第一夹爪52夹取至压装工位,换句话说,当本实施例的磁瓦自动组装设备设有点胶台40时,第一夹爪52是从点胶台40上而非从外壳进料机构10上夹取外壳12。
44.本实施例的外壳进料机构10和/或产品出料机构30可以是皮带传输机。较佳的,如图4所示,本实施例的外壳进料机构10上还可以设有相对设置的第一导板101和第二导板102,第一导板101和第二导板102之间的距离沿进料方向减小,也即,第一导板101和第二导板102形成一个喇叭口,喇叭口的口径沿进料方向减小,以辅助外壳12的精准定位,提高第三夹爪502的夹取有效率。
45.综上所述,本实施例的磁瓦自动组装设备的工作原理如下:
46.当多个盛具4中的磁瓦11被吸附在套管3上形成一圆柱体后,顶料气缸将套管3向上顶起,套管3上的磁瓦11高于盛具4所在的平面,第一夹爪52在第一气缸51的带动下将外壳12(外壳12在点胶台40上已完成内壁的点胶)压装在套管3上的多个磁瓦11外;接着,磁吸模块82在第三气缸71和第四气缸81的带动下将卡簧13压入围构成圆柱的磁瓦11的内部以防止磁瓦11脱落,此时,完成了一个产品的组装。
47.本实用新型中应用了具体实施例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1