一种自走式高效焊接作业头机构的制作方法
1.本实用新型涉及一种焊接机构,属机械加工设备技术领域。
背景技术:
2.在建筑施工作业中,自走式焊接焊具是针对进行自动化焊接、大面积连续焊接及高精度焊接作业时的重要设备,使用量巨大,但在实际使用中,当前所使用的具备自走式焊接设备往往均为传统的行走结构,即将焊接用焊具简单的与普通滑车、滑块连接,虽然一定程度上可以满足自走连续焊接作业的需要,但在焊接作业时,行走方式单一,仅能满足特定焊接作业面焊接作业的需要,因此使用的灵活性和通用性较差,对一些复杂工件、复杂焊接作业面及复杂焊接工艺无法有效的配合运行,从而严重影响了焊接作业的工作效率。
3.此外,当前传统的自走焊接设备在运行时,对行程、焊接位置等参数均缺乏精确且有效的监控,从而导致当前在焊接作业时的加工精度也受到了较大的影响。
4.因此针对这一问题,迫切需要开发一种全新的自走式焊接设备,以满足实际使用的需要。
技术实现要素:
5.本实用新型目的就在于克服上述不足,提供一种面板360
°
翻转无缝连接合页。该实用新型结构简单,调节灵活方便,在满足与焊接机床等设备配套进行焊接作业需要的同时,另可灵活调整焊接作业工作面,且调整灵活性好,调整精度高,从而极大的提高了本新型焊接作业时的灵活性、通用性,并可有效满足多种复杂焊接作业面及焊接工业焊接作业的需要。
6.为实现上述目的,本实用新型是通过以下技术方案来实现:
7.一种自走式高效焊接作业头机构,包括定位基座、导向臂、滑车、水平驱动机构、万向转台、伸缩驱动机构、焊接机构及驱动电路,定位基座为轴线与水平垂直分布的板状框架结构,定位基座前端面通过万向转台与导向臂后端面铰接,导向臂为横断面呈矩形框架结构,其轴线与定位基座前端面呈0
°
—180
°
夹角,水平驱动机构嵌于导向臂内并与导向臂同轴分布,水平驱动机构与滑车连接,且滑车与导向臂外表面滑动连接,滑车外表面与至少一个焊接机构连接,且焊接机构轴线与导向臂轴线垂直分布,伸缩驱动机构至少三个,环绕导向臂轴线均布,且各伸缩驱动机构前端面与导向臂外表面铰接,后端面与定位基座前端面铰接,伸缩驱动机构轴线与导向臂轴线呈10
°
—90
°
夹角,驱动电路嵌于定位基座内,并分别与水平驱动机构、万向转台、伸缩驱动机构、焊接机构电气连接。
8.进一步的,所述的滑车包括导向套、圆弧驱动导轨、承载台、位移传感器及倾角传感器,所述导向套为与导向臂同轴分布的空心圆柱状结构,并包覆在导向臂外与导向臂外表面滑动连接,所述导向套内表面与水平驱动机构连接,所述圆弧驱动导轨至少一条,包覆在导向套外并与导向套同轴分布,所述承载台后端面通过圆弧驱动导轨与导向套外表面滑动连接,前端面与焊接机构连接,所述倾角传感器嵌于承载台外侧面,所述位移传感器至少
一个并嵌于导向套后端面,所述圆弧驱动导轨、位移传感器及倾角传感器均与驱动电路电气连接。
9.进一步的,所述的承载台侧表面设至少两个行走轮,所述行走轮对称分布在承载台两侧,并通过弹簧柱与承载台侧表面铰接,所述行走轮与承载台下端面间间距为0—10厘米。
10.进一步的,所述的导向臂外表面另设若干滑槽及一个倾角传感器,所述滑槽与导向臂轴线平行分布,并环绕导向臂轴线均布,所述导向臂通过滑槽分别与滑车及伸缩驱动机构前端面滑动连接,所述倾角传感器嵌于导向臂内并位于导向臂中点位置,所述倾角传感器与驱动电路电气连接。
11.进一步的,所述的水平驱动机构为直线电动机、齿轮齿条机构、丝杠机构、蜗轮蜗杆机构、传动链条机构及传动带机构中的任意一种;所述伸缩驱动机构为电动伸缩杆、液压伸缩杆及气压伸缩杆中的任意一种。
12.进一步的,所述的驱动电路为可编程控制器及工业单片机中的任意一种。
13.本实用新型结构简单,调节灵活方便,在满足与焊接机床等设备配套进行焊接作业需要的同时,另可灵活调整焊接作业工作面,且调整灵活性好,调整精度高,从而极大的提高了本新型焊接作业时的灵活性、通用性,并可有效满足多种复杂焊接作业面及焊接工业焊接作业的需要。
附图说明
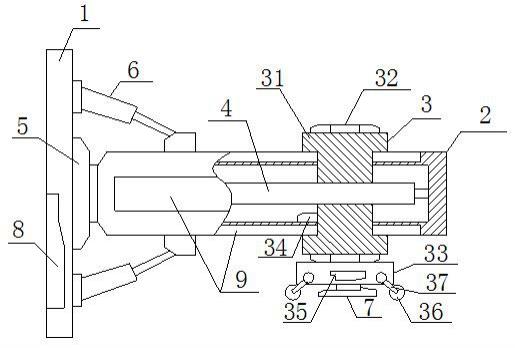
14.图1为本实用新型一种使用状态局部结构示意图。
具体实施方式
15.如图1所示,一种自走式高效焊接作业头机构,包括定位基座1、导向臂2、滑车3、水平驱动机构4、万向转台5、伸缩驱动机构6、焊接机构7及驱动电路8,定位基座`为轴线与水平垂直分布的板状框架结构,定位基座`前端面通过万向转台5与导向臂2后端面铰接,导向臂1为横断面呈矩形框架结构,其轴线与定位基座1前端面呈0
°
—180
°
夹角,水平驱动机构4嵌于导向臂2内并与导向臂2同轴分布,水平驱动机构4与滑车3连接,且滑车3与导向臂2外表面滑动连接,滑车3外表面与至少一个焊接机构7连接,且焊接机构7轴线与导向臂2轴线垂直分布,伸缩驱动机构6至少三个,环绕导向臂2轴线均布,且各伸缩驱动机构6前端面与导向臂2外表面铰接,后端面与定位基座1前端面铰接,伸缩驱动机构6轴线与导向臂2轴线呈10
°
—90
°
夹角,驱动电路8嵌于定位基座内,并分别与水平驱动机构4、万向转台5、伸缩驱动机构6、焊接机构7电气连接。
16.重点说明的,所述的滑车3包括导向套31、圆弧驱动导轨32、承载台33、位移传感器34及倾角传感器35,所述导向套31为与导向臂2同轴分布的空心圆柱状结构,并包覆在导向臂2外与导向臂2外表面滑动连接,所述导向套31内表面与水平驱动机构4连接,所述圆弧驱动导轨32至少一条,包覆在导向套31外并与导向套31同轴分布,所述承载台33后端面通过圆弧驱动导轨32与导向套31外表面滑动连接,前端面与焊接机构7连接,所述倾角传感器35嵌于承载台33外侧面,所述位移传感器34至少一个并嵌于导向套31后端面,所述圆弧驱动导轨32、位移传感器34及倾角传感器35均与驱动电路8电气连接。
17.同时,所述的承载台33侧表面设至少两个行走轮36,所述行走轮36对称分布在承载台33两侧,并通过弹簧柱37与承载台33侧表面铰接,所述行走轮36与承载台33下端面间间距为0—10厘米。
18.本实施例中,所述的导向臂2外表面另设若干滑槽9及一个倾角传感器35,所述滑槽9与导向臂2轴线平行分布,并环绕导向臂2轴线均布,所述导向臂2通过滑槽9分别与滑车3及伸缩驱动机构6前端面滑动连接,所述倾角传感器35嵌于导向臂2内并位于导向臂2中点位置,所述倾角传感器35与驱动电路8电气连接。
19.进一步优化的,所述的水平驱动机构4为直线电动机、齿轮齿条机构、丝杠机构、蜗轮蜗杆机构、传动链条机构及传动带机构中的任意一种;所述伸缩驱动机构6为电动伸缩杆、液压伸缩杆及气压伸缩杆中的任意一种。
20.此外,所述的驱动电路8为可编程控制器及工业单片机中的任意一种。
21.本新型在具体实施中,首先对构成本新型的定位基座、导向臂、滑车、水平驱动机构、万向转台、伸缩驱动机构、焊接机构及驱动电路进行组装,然后将组装后的本新型通过定位基座与机床等焊接设备连接,将本新型的焊接机构与外部焊接设备的电源、焊丝供给机构等设备连接,最后将驱动电路与外部焊接设备的控制电路电气连接,即可完成本新型装配。
22.本新型在具体实施中,一方面通过万向转台、伸缩驱动机构配合,调整导向臂的工作位置,使得导向臂指向位置与焊接作业面位置相同;另一方面通过水平驱动机构驱动滑车运行,使得滑车所连接的焊接机构处于焊接作业面位置并进行焊接作业;
23.在焊接作业的同时,滑车的承载台在对焊接机构承载并焊接作业的同时,一方面通过圆弧驱动导轨在环绕导向臂轴线360
°
范围内进行焊接作业,从而有效提高焊接作业范围及满足不同焊接作业供给及焊接作业面面进行焊接作业的需要。
24.此外,在焊接作业中,另可通过倾角传感器、位移传感器对焊接作业的工作位置进行精确监控,从而达到提高焊接作业控制精度的目的。
25.本实用新型结构简单,调节灵活方便,在满足与焊接机床等设备配套进行焊接作业需要的同时,另可灵活调整焊接作业工作面,且调整灵活性好,调整精度高,从而极大的提高了本新型焊接作业时的灵活性、通用性,并可有效满足多种复杂焊接作业面及焊接工业焊接作业的需要。
26.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1