一种激光-MIG复合焊接头装置的制作方法
一种激光
‑
mig复合焊接头装置
技术领域
1.本实用新型属于焊接技术领域,具体涉及一种激光
‑
mig复合焊接头装置。
背景技术:
2.激光
‑
mig复合焊结合了激光和mig电弧两个独立热源各自的优点(如激光热源具有高的能量密度、极优的单向性、及透明介质传导的特性,mig电弧等离子体具有高的热
‑
电转化效率、低廉的设备运行成本、技术发展成熟等优势),极大程度地避免了二者的缺点(如金属材料对激光的高反射率造成的激光能量损失、激光设备高的设备成本、低的电
‑
光转化效率等,mig电弧热源较低的能量密度、高速移动时放电稳定性差等),同时二者的有机结合衍生出了很多新的特点(高能量密度、高能量利用率、高的电弧稳定性、较低的工装准备精度以及待焊接工件表面质量等),使之成为具有极大应用前景的新型焊接热源。
3.由于激光
‑
mig复合焊焊接工艺复杂,复合焊装置都是依靠国外进口的一体化设备,成本极高且供货周期不可控。
技术实现要素:
4.为了解决现有国内激光
‑
mig复合焊接结构全部依靠进口,而进口的一体化设备备存在成本高且供货周期不可控的问题,本实用新型提供了一种激光
‑
mig复合焊接头装置。
5.本实用新型的具体技术方案是:
6.本实用新型提供了一种激光
‑
mig复合焊接头装置,包括激光焊接头、mig焊枪、机器人连接板、焊枪调整机构及ccd成像系统;
7.激光焊接头上安装机器人连接板;
8.机器人连接板通过焊枪调整机构安装所述mig焊枪,所述焊枪调整机构用于提供mig焊枪在x、y方向,以及绕xy平面旋转的调节,确保mig焊枪的送丝角度,以及焊丝与激光光束之间间距可调;
9.ccd成像系统安装于激光焊接头上,用于对激光焊接处的位置进行成像。
10.进一步地,上述焊枪调整机构包括l形连接板、第一连接板、第二连接板以及焊枪安装块;
11.l形连接板一端通过螺钉连接于所述机器人连接板的侧方;
12.第一连接板通过其上设置的y向长条孔以螺钉连接的方式安装于l形连接板的另一端;
13.第二连接板通过其上设置的x向长条孔以螺钉连接方式安装在第一连接板上,且第二连接板上设有旋转中心孔;
14.焊枪安装块包括装夹部和旋转部;
15.装夹部上开设有用于对mig焊枪进行装夹的装夹孔;
16.旋转部上设有旋转轴,以及设置在旋转轴两侧的弧形长条孔;
17.旋转部通过其上设置的弧形长条孔以螺钉连接的方式安装在第二连接板上,且所
述旋转轴安装于所述旋转中心孔内。
18.进一步地,上述l形连接板通过其上开设的z向长条孔安装于机器人连接板侧方。
19.进一步地,上述装夹部为分体式结构,包括与旋转部固定连接的固定块以及活动块,所述固定块和活动块上均设有半圆形孔。
20.进一步地,上述激光焊接头和mig焊枪的热源前端都安装有碰撞传感器,一旦与工件或工装夹具发生碰撞,激光
‑
mig复合焊整套设备会立即停止工作并报警。防止设备的深度损坏,确保设备和人身安全。
21.进一步地,上述机器人连接板为铝合金材料制作。
22.本实用新型的有益效果是在于:
23.1、本实用新型采用焊枪调整机构将激光焊接头、mig焊枪进行连接,并通过焊枪调整机构的x、y方向调节以及xy平面的旋转调节实现了mig焊枪的送丝角度,以及焊丝与激光光束之间间距可调,通过该结构设计可将不同的激光焊接头和不同的焊枪进行组合,相比进口的一体化设备,成本低,结构简单,打破了进口设备对该领域的垄断。
24.2、本实用新型采用l形连接板、第一连接板、第二连接板以及焊枪安装块构成的焊枪调整机构,x、y方向的调节通过长条孔和螺钉实现,xy平面的旋转调节依靠弧形长条孔、螺钉以及旋转轴实现,结构简单、制造成本低,操作简单。
25.3、本实用新型中的l形连接板通过长条孔和螺钉连接于机器人连接板上,可实现mig焊枪在z方向的微调,可消除装配带来的z向误差,进一步的确保了焊丝和激光光束之间位置关系。
附图说明
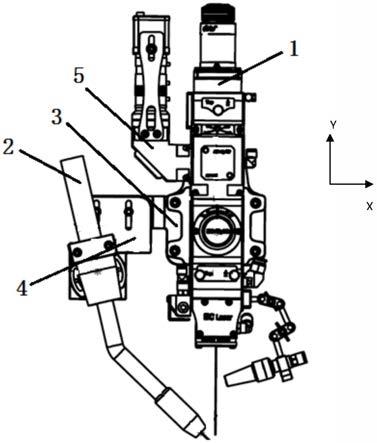
26.图1为本实用新型的结构示意图。
27.图2为焊枪调整机构的第一视角立体图;
28.图3为焊枪调整机构的第二视角立体图;
29.附图标记如下:
[0030]1‑
激光焊接头、2
‑
mig焊枪、3
‑
机器人连接板、4
‑
焊枪调整机构、5
‑
ccd成像系统、6
‑
l形连接板、7
‑
第一连接板、8
‑
第二连接板、9
‑
焊枪安装块、10
‑
y向长条孔、11
‑
x向长条孔、12
‑
旋转中心孔、13
‑
装夹部、14
‑
旋转部、15
‑
装夹孔、16
‑
旋转轴、17
‑
弧形长条孔、18
‑
固定块、19
‑
活动块、20
‑
z向长条孔。
具体实施方式
[0031]
下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在有没做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0032]
在本实用新型的描述中,需要说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0033]
在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地
连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0034]
本实施例提供了一种激光
‑
mig复合焊接头装置的结构,如图1所示,该装置包括激光焊接头1、mig焊枪2、机器人连接板3、焊枪调整机构4及ccd成像系统5;
[0035]
激光焊接头1上安装机器人连接板3;
[0036]
机器人连接板3通过焊枪调整机构4安装所述mig焊枪2,焊枪调整机构4用于提供mig焊枪在x、y方向(x方向为图1中的左右方向,y方向为图1中的上下方向),以及绕xy平面旋转的调节,确保mig焊枪的送丝角度,以及焊丝与激光光束之间间距可调;
[0037]
ccd成像系统5安装于激光焊接头1上,ccd成像系统5可将激光焊接处的位置成像在显示器中,使操作人员可以清晰的看到焊缝处的影像。便于焊接定位和焊缝成型的观察。
[0038]
在激光
‑
mig复合焊接过程中,焊丝送丝角度,焊丝与激光光束的间距是两个非常重要的参数,极大的影响了焊接质量和效果。本实用新型中的焊枪调整模块可以轻松的实现上下,左右,前后及角度旋转。在复合焊过程中,根据不同工艺的需要,焊枪和激光之间的位置关系可以灵活的实现。如图2和3所示,本实施例中焊枪调整机构包括l形连接板6、第一连接板7、第二连接板8以及焊枪安装块9;l形连接板6一端通过螺钉连接于所述机器人连接板3的侧方;第一连接板7通过其上设置的y向长条孔10以螺钉连接的方式安装于l形连接板6的另一端;第二连接板8通过其上设置的x向长条孔11以螺钉连接方式安装在第一连接板7上,且第二连接板8上设有旋转中心孔12;焊枪安装块9包括装夹部13和旋转部14;装夹部13上开设有用于对mig焊枪进行装夹的装夹孔15;旋转部14上设有旋转轴16,以及设置在旋转轴16两侧的弧形长条孔17;旋转部14通过其上设置的弧形长条孔17以螺钉连接的方式安装在第二连接板8上,且所述旋转轴16安装于所述旋转中心孔12内。
[0039]
使用时,通过调节第二连接板8在y向长条孔10的位置,可实现焊枪的y向调节,通过调节焊枪安装块9在x向长条孔11的位置,可实现焊枪的x向调节,确保焊丝与激光光束之间的间距;通过旋转焊枪安装块9可调节实现焊枪的xy平面的旋转,从而确保送丝角度。
[0040]
由于焊枪在x、y均可调节,为了避免装配时带来的误差,l形连接板6通过其上开设的z向长条孔20安装于机器人连接板3侧方。
[0041]
为了方便焊枪的装夹,焊枪安装块的装夹13部为分体式结构,包括与旋转部14固定连接的固定块18以及活动块19,固定块18和活动块19上均设有半圆形孔,使用时,固定块18和活动块19相连后,两个半圆形孔形成一个用于对mig焊枪进行装夹的装夹孔15。
[0042]
机器人连接板是连接激光
‑
mig复合焊装置与机器人的中间转接板,它的精密性和刚性直接影响到焊接精度和轨迹精度,本实施中优选铝合金作为机器人连接板3的制作材料,经过精密的铣削加工而成,使得该机器人连接板质量轻,强度大,符合机器人激光复合焊的使用要求。
[0043]
本实施例所采用激光焊接头在垂直于光轴平面,可做x、z两方向调节,保证激光从喷嘴中心穿过。另外,该焊接头的聚焦镜可作上下调节,可改变光斑大小,适应不同的焊缝要求。
[0044]
本实施例mig焊枪是超高性能的多功能脉冲mig焊机,具有特殊的焊铝程序设计,解决了焊铝起弧难熔合,收弧易形成焊接缺陷的难题;具有增强型双脉冲功能,送丝速度与输出能量协同控制,尤其在铝合金焊接时实现完美的鱼鳞纹焊缝并提高焊缝质量;并且用
户可存储自定义的100套焊接规范参数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1