一种数控机床的新型三卡爪的制作方法
1.本实用新型主要涉及数控机床的技术领域,具体为一种数控机床的新型三卡爪。
背景技术:
2.数控机床是一种装有程序控制系统的自动化机床,能够根据已编好的程序,使机床动作并加工零件。数控机床综合了机械、自动化、计算机、微电子等技术,解决了复杂、精密、小批量零件的加工问题,是一种柔性的、高效能的自动化机床。
3.例如专利号为201820409648.8的专利,包括操控箱,所述操控箱下端固定连接有集水箱,所述集水箱下端固定连接有挡管,所述操控箱侧端连接有操控管,所述操控箱顶端固定安装有液压机构,所述液压机构下端安装有电机,所述电机下端转动连接有空心转杆,且空心转杆下端贯穿集水箱内部和挡管转动连接有四个呈环形等距分布的活动喷头,所述活动喷头包括连接板,所述连接板下端固定安装有喷头,所述连接板侧端转动连接有转轴。
4.虽然解决了提高了机床的清洁效果,但是不便于更换机床抓取物品的夹持块。
技术实现要素:
5.本实用新型主要提供了一种数控机床的新型三卡爪,用以解决上述背景技术中提出的技术问题。
6.本实用新型解决上述技术问题采用的技术方案为:
7.一种数控机床的新型三卡爪,包括机器臂,所述机器臂一端固定连接有第一连接块,所述第一连接块下方设有第二连接块,所述第二连接块下方固定设有支撑块,所述支撑块下方均匀设有夹持块;
8.每个所述夹持块包括固定块,所述固定块上方设有移动块,所述固定块底部一侧设有固定滑条,所述固定块远离固定滑条一侧设有伸缩滑条,所述伸缩滑条上方设有第一滑动槽,所述第一滑动槽内部设有滑动块,所述滑动块底部固定设有凸块,所述滑动块中心设有孔洞,所述孔洞贯穿至凸块,所述伸缩滑条靠近固定块一端设有第一固定座,所述第一滑动槽底部设有固定柱。
9.优选的,所述固定柱外周边设有弹簧,所述弹簧两端分别与第一滑动槽底部和第一固定座底部相抵接,便于伸缩滑条的位置回归。
10.优选的,所述凸块宽度小于滑动块宽度,便于改变伸缩滑条的延长长度。
11.优选的,所述滑动块呈l型,便于人工提升和下压滑动块。
12.优选的,所述支撑块内壁均匀设有与夹持块一一对应的第二滑动槽,所述支撑块与夹持块滑动连接,有助于夹持块在移动过程中更加具有稳定性。
13.优选的,所述固定块与移动块内侧表面均设有橡胶凹凸点,有助于夹持物品时增大摩擦力,且保护物品。
14.优选的,所述第一连接块内部设有电机,所述电机输出端与第二连接块固定连接,便于360度转动支撑块。
15.与现有技术相比,本实用新型的有益效果为:
16.该数控机床的新型三卡爪,通过第二滑动槽与夹持块的滑动连接,有助于提高夹持块在移动过程中的稳定性,夹持块包括固定块和移动块,固定块与移动块滑动连接,有助于夹持不同高度的物品,固定块底部一侧设有固定滑条,另一侧设有伸缩滑条,伸缩滑条上方设有第一滑动槽,第一滑动槽内部设有滑动块,滑动块底部设有凸块,凸块宽度小于滑动块的宽度,滑动块中心设有孔洞,孔洞延伸是凸块,第一滑动槽底部设有固定柱,固定柱外周边套有弹簧,弹簧两端分别与第一滑动槽底部和伸缩滑条一侧设有的第一固定座相抵接,当下压滑动块时,滑动块将伸缩滑条向外抵出,使得夹持块与第二滑动槽紧密连接,当上拉滑动块时,弹簧使得伸缩滑条回弹,伸缩滑条与第二滑动块分离,便于更换夹持块。
17.以下将结合附图与具体的实施例对本实用新型进行详细的解释说明。
附图说明
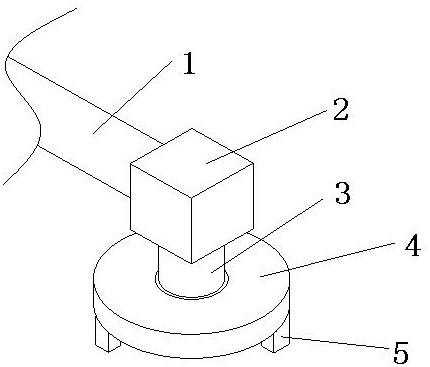
18.图1为本实用新型的结构示意图;
19.图2为本实用新型的夹持块结构示意图;
20.图3为本实用新型的伸缩滑条结构示意图;
21.图4为本实用新型的第一固定座结构示意图;
22.图5为本实用新型的第二滑动槽结构示意图;
23.图6为本实用新型的第一连接块剖面结构示意图。
24.图中:1、机器臂;2、第一连接块;21、电机;3、第二连接块;4、支撑块;41、第二滑动槽;5、夹持块;51、固定块;511、固定滑条;512、伸缩滑条;5121、第一固定座;513、第一滑动槽;5131、固定柱;5132、弹簧;514、滑动块;5141、凸块;5142、孔洞;52、移动块。
具体实施方式
25.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更加全面的描述,附图中给出了本实用新型的若干实施例,但是本实用新型可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本实用新型公开的内容更加透彻全面。
26.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
27.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常连接的含义相同,本文中在本实用新型的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本实用新型,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
28.请着重参照附图1
‑
6,本实用新型提供一种技术方案:一种数控机床的新型三卡爪,包括机器臂1,所述机器臂1一端固定连接有第一连接块2,所述第一连接块2下方设有第二连接块3,所述第二连接块3下方固定设有支撑块4,所述支撑块4下方均匀设有夹持块5;
29.每个所述夹持块5包括固定块51,所述固定块51上方设有移动块52,所述固定块51
底部一侧设有固定滑条511,所述固定块51远离固定滑条511一侧设有伸缩滑条512,所述伸缩滑条512上方设有第一滑动槽513,所述第一滑动槽513内部设有滑动块514,所述滑动块514底部固定设有凸块5141,所述滑动块514中心设有孔洞5142,所述孔洞5142贯穿至凸块5141,所述伸缩滑条512靠近固定块51一端设有第一固定座5121,所述第一滑动槽513底部设有固定柱5131。
30.请着重参照附图3
‑
4,所述固定柱5131外周边设有弹簧5132,所述弹簧5132两端分别与第一滑动槽513底部和第一固定座5121底部相抵接,所述凸块5141宽度小于滑动块514宽度,所述滑动块514呈l型,有助于调节伸缩滑条512的延长长度。
31.请着重参照附图5,所述支撑块4内壁均匀设有与夹持块5一一对应的第二滑动槽41,所述支撑块4与夹持块5滑动连接,所述固定块51与移动块52内侧表面均设有橡胶凹凸点,有助于提高夹持块的稳定性,提高夹持物品时增大摩擦力,且保护物品。
32.请着重参照附图6,所述第一连接块2内部设有电机21,所述电机21输出端与第二连接块3固定连接,便于360度转动支撑块4。
33.本实用新型的具体操作方式如下:
34.该数控机床的新型三卡爪,通过第二滑动槽41与夹持块5的滑动连接,有助于提高夹持块5在移动过程中的稳定性,夹持块5包括固定块51和移动块52,固定块51与移动块52滑动连接,有助于夹持不同高度的物品,固定块51底部一侧设有固定滑条511,另一侧设有伸缩滑条512,伸缩滑条512上方设有第一滑动槽513,第一滑动槽513内部设有滑动块514,滑动块514底部设有凸块5141,凸块5141宽度小于滑动块514的宽度,滑动块514中心设有孔洞5142,孔洞5142延伸是凸块5141,第一滑动槽513底部设有固定柱5131,固定柱5131外周边套有弹簧5132,弹簧5132两端分别与第一滑动槽513底部和伸缩滑条512一侧设有的第一固定座5121相抵接,当下压滑动块514时,滑动块514将伸缩滑条512向外抵出,使得夹持块5与第二滑动槽41紧密连接,当上拉滑动块514时,弹簧5132使得伸缩滑条512回弹,伸缩滑条512与第二滑动块41分离,便于更换夹持块5。
35.上述结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的这种非实质改进,或未经改进将本实用新型的构思和技术方案直接应用于其他场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1