一种钢筋笼滚焊机的制作方法
1.本技术涉及滚焊机的领域,尤其是涉及一种钢筋笼滚焊机。
背景技术:
2.在桥梁、房屋建设等施工过程中需要进行大量桩柱施工,在桩柱施工中,需要以钢筋笼作为桩柱的骨架,再向桩柱浇筑混凝土,从而实现桩柱的成型。
3.钢筋笼包括作为骨架的骨架筋和用于固定骨架筋的箍筋。目前,钢筋笼的制备是利用钢筋笼滚焊机来完成的。制备时,将骨架筋依次放入到钢筋笼滚焊机的传送架上,并将骨架筋的一端放置到钢筋笼滚焊机的固定架上。骨架筋放入到固定架上后,需要旋转固定架上的螺丝,使螺丝抵紧骨架筋,从而完成对骨架筋的固定。放置工作完成后将箍筋的一端焊接在骨架筋上,然后传送架带动骨架筋转动,钢筋笼滚焊机的电焊器对箍筋和骨架筋进行滚焊。
4.针对上述中的相关技术,发明人认为固定骨架筋时,需要旋转螺丝依次对放入固定架上的多根骨架筋进行固定,装配效率缓慢,需要进一步提高。
技术实现要素:
5.为了提高骨架筋在钢筋笼滚焊机上的装配效率,本技术提供一种钢筋笼滚焊机。
6.本技术提供的一种钢筋笼滚焊机采用如下的技术方案:
7.一种钢筋笼滚焊机,包括固定架,所述固定架上设有与固定架转动连接的转盘,所述转盘上开设有若干供骨架筋穿过的定位孔,转盘的轴线与每一所述定位孔之间均设有位于转盘上且与转盘滑动连接的定位板,还包括同时驱动若干定位板沿转盘的径向移动的驱动机构。
8.通过采用上述技术方案,骨架筋穿过转盘上的定位孔后,驱动机构可以驱动若干定位板同时沿转盘的径向移动,从而可以将定位板抵触到骨架筋上,使得骨架筋与转盘之间不再发生相对滑动,降低了骨架筋从转盘上脱落的可能性。
9.可选的,述驱动机构包括若干沿转盘的径向设于转盘上的滑管,所述滑管上设有与滑管滑动连接的滑竿,所述定位板设于滑竿远离转盘轴线的一端,还包括驱动滑竿沿滑管的轴向移动的驱动组件。
10.通过采用上述技术方案,驱动组件驱动滑竿沿滑管的轴向移动,滑竿移动时可以带动定位板沿转盘的径向移动,使得定位板可以抵触到骨架筋上,对骨架筋起到固定的作用。
11.可选的,所述驱动组件包括沿转盘的轴向设于转盘侧壁上的驱动管,所述驱动管内设有与驱动管滑动连接的推动杆,所述推动杆伸出驱动管的一端上设有推动板,滑竿远离定位板的一端上设有与滑竿轴铰连接的转向杆,所述转向杆远离定位板的一端与推动板轴铰连接,还包括驱动推动板沿转盘的轴向移动的驱动件。
12.通过采用上述技术方案,驱动件驱动推动杆沿驱动管的轴向移动,推动杆带动推
动板沿驱动管的轴向移动,推动板带动与推动板轴铰连接的转向杆移动,转向杆带动与转向杆轴铰连接的滑竿沿滑管的轴向移动,从而实现了驱动件控制定位板移动的效果。
13.可选的,所述驱动件为设于转盘上的气缸,所述气缸的输出轴连接于推动杆。
14.通过采用上述技术方案,气缸运转可以带动推动杆沿驱动管的轴向移动,从而可以通过推动板和转向杆带动滑竿和定位板移动。
15.可选的,所述固定架设于滑动座上并与滑动座滑动连接,所述滑动座上设有若干齿条,所述固定架上设有与齿条相啮合的齿轮,固定架上还设有驱动齿轮转动的动力件。
16.通过采用上述技术方案,固定架可以带动转盘沿滑动座的长度方向移动,从而可以带动转盘上的骨架筋随固定架移动。动力件驱动与齿条啮合的齿轮转动,齿轮通过与齿条的相互作用驱动固定架沿齿条的长度方向移动。
17.可选的,所述动力件为设于固定架上的第一电机,所述第一电机的输出轴连接于齿轮。
18.通过采用上述技术方案,第一电机驱动齿轮转动,使得齿轮可以在齿条上滚动。
19.可选的,所述固定架的一侧设有支撑架,所述支撑架上设有与支撑架转动连接的支撑盘,所述支撑盘上开设有若干供骨架筋穿过的通孔。
20.通过采用上述技术方案,支撑盘可以对骨架筋起到支撑和固定的作用,降低了骨架筋从转盘上脱落的可能性。
21.可选的,所述支撑架上设有导向板,所述导向板上间隔设有若干上下交错的导向轮,导向板的两端均设有限位辊。
22.通过采用上述技术方案,箍筋经过导向轮时会在导向轮的作用下变得更加笔直,从而利于箍筋缠绕在骨架筋上。限位辊有效降低了箍筋从导向轮上脱落的可能性。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.本技术在转盘上设置了若干用于抵触并固定骨架筋的定位板,驱动机构可以同时驱动若干定位板移动,从而可以一次完成对多个骨架筋的固定,有效提升了骨架筋的装配效率;
25.2.本技术通过在支撑架上设置的用于拉直箍筋的导向轮,使得箍筋缠绕在骨架筋上时,可以与骨架筋更好地贴合。
附图说明
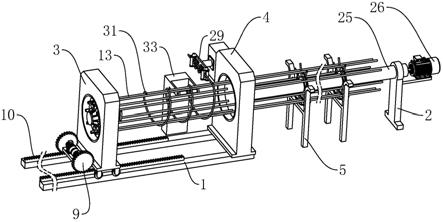
26.图1是本技术实施例一种钢筋笼滚焊机的总体结构示意图。
27.图2是本技术实施例的固定架的结构示意图。
28.图3是本技术实施例的转盘的结构示意图。
29.图4是本技术实施例的转动轴的结构示意图。
30.附图标记说明:1、滑动座;2、驱动架;3、固定架;4、支撑架;5、传送架;6、转轮;7、安装板;8、第一电机;9、齿轮;10、齿条;11、转盘;12、定位管;13、骨架筋;14、驱动管;15、支撑杆;16、滑管;17、滑竿;18、转向杆;19、推动杆;20、气缸;21、推动板;22、定位板;23、支撑盘;24、通孔;25、转动轴;26、第二电机;27、定位杆;28、定位曲杆;29;导向板;30、导向轮;31、箍筋;32、限位辊;33、电焊机;34、电焊器。
具体实施方式
31.以下结合附图1
‑
4对本技术作进一步详细说明。
32.本技术实施例公开一种钢筋笼滚焊机。参照图1,一种钢筋笼滚焊机,包括滑动座1和设于滑动座1一侧的驱动架2,滑动座1的长度大于骨架筋13的长度。滑动座1上设有与滑动座1滑动连接的固定架3,滑动座1上设有位于固定架3和驱动架2之间的支撑架4。支撑架4与驱动架2之间还设有若干传送架5。
33.参照图2,固定架3上设有若干与固定架3转动连接的转轮6,转轮6的周面与滑动座1贴合,转轮6起到支撑固定架3的作用,且将固定架3与滑动座1之间的滑动摩擦转化为了滚动摩擦,降低了固定架3与滑动座1之间的摩擦力。固定架3的侧面上设有安装板7,安装板7沿固定架3长度方向的两端均设有第一电机8,第一电机8的输出轴上设有齿轮9,滑动座1上沿滑动座1的长度方向设有与齿轮9相啮合的齿条10。第一电机8运转会驱动齿轮9沿齿条10的长度方向移动,进而带动固定架3沿滑动座1的长度方向移动。
34.参照图2和图3,固定架3上设有与固定架3转动连接的转盘11,转盘11上开设有若干定位孔,转盘11上穿设有位于定位孔内的定位管12,骨架筋13的一端插入到定位管12内。转盘11上设有驱动机构,驱动机构包括转盘11背离支撑架4的侧壁上设置的驱动管14,驱动管14与转盘11同轴设置。驱动管14与每一定位管12中间均设有位于转盘11上的支撑杆15,支撑杆15上设有滑管16,滑管16内插设有两端伸出滑管16且与滑管16滑动连接的滑竿17,滑竿17靠近驱动管14的一端设有与滑竿17轴铰连接的转向杆18。
35.参照图3,转盘11上穿设有与转盘11滑动连接的推动杆19,推动杆19穿过驱动管14并与驱动管14滑动连接,转盘11靠近支撑架4的侧壁上设有输出轴连接于推动杆19的气缸20。推动杆19远离支撑架4的一端上设有推动板21,转向杆18远离滑竿17的一端与推动板21轴铰连接。气缸20可以驱动推动杆19沿驱动管14的轴向移动,进而会带动推动板21移动,推动板21会通过转向杆18驱动滑竿17沿滑管16的轴向移动。
36.参照图3,滑竿17远离转向杆18的一端设有弧形的定位板22,定位管12上开设有供定位板22穿过的让位口,气缸20运转会带动滑竿17沿滑管16的轴向移动,进而会带动定位板22沿滑管16的轴向移动,从而定位板22可以抵触到骨架筋13上,使得骨架筋13不易脱离定位管12。
37.参照图4,支撑架4上设有与支撑架4转动连接的支撑盘23,支撑盘23上开设有若干供骨架筋13穿过的通孔24,支撑盘23与驱动架2间设有转动轴25,转动轴25的一端与支撑盘23固定连接,转动轴25的另一端与驱动架2转动连接,驱动架2上还设有驱动转动轴25转动的第二电机26。
38.参照图4,转动轴25上沿转动轴25的周向设有若干定位杆27,传送架5上设有位于转动轴25轴线下方的定位曲杆28,定位曲杆28呈弧形设置,定位杆27转动到转动轴25轴线的下方时会贴合定位曲杆28转动。定位曲杆28对位于两定位杆27之间的骨架筋13起到限位的作用。
39.参照图4,支撑架4上设有导向板29,导向板29上间隔设有若干上下交错的导向轮30,箍筋31经过导向板29时,导向轮30分布在箍筋31的上下两侧,导向轮30可以对弯折的箍筋31起到拉直的作用。导向板29长度方向的两端均设有两个限位辊32,箍筋31从两个限位辊32中间穿过,限位辊32对箍筋31起到限位的作用,有效降低了箍筋31从导向轮30中间脱
落的可能性。
40.参照图4,滑动座1长度方向的一侧设有电焊机33,电焊机33上设有用于焊接骨架筋13和箍筋31的电焊器34。
41.本技术实施例一种钢筋笼滚焊机的实施原理为:骨架筋13放置到传送架5上,再将骨架筋13沿转动轴25的长度方向移动,使得骨架筋13的一端穿过支撑盘23进入到定位管12内。气缸20运转时会通过推动板21和转向杆18驱动滑竿17移动,从而使得定位板22抵触到骨架筋13上,实现对骨架筋13的固定。骨架筋13被定位板22固定后,第一电机8驱动固定架3沿滑动座1的长度方向移动,固定架3会带动骨架筋13沿滑动座1的长度方向移动,同时转动轴25会驱动骨架筋13围绕转动轴25的轴向转动,使得箍筋31可以在骨架筋13上螺旋缠绕。骨架筋13和箍筋31的接触点在经过电焊器34时,骨架筋13和箍筋31会被电焊器34焊接到一起。
42.与相关技术相比,本技术实施例在转盘11上设置了若干用于抵触并固定骨架筋13的定位板22,驱动机构可以同时驱动若干定位板22移动,从而可以一次完成对多个骨架筋13的固定,有效提升了骨架筋13的装配效率。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1